Trajectory Tracking for Unmanned Aerial Vehicles in 3D Spaces under Motion Constraints

0

Sign in to get full access
Overview
- This paper presents a method for trajectory tracking of unmanned aerial vehicles (UAVs) in 3D spaces under motion constraints.
- The proposed approach aims to enable UAVs to accurately follow desired trajectories while considering physical limitations such as maximum speed and acceleration.
- The authors develop a model predictive control (MPC) framework to generate feasible trajectories that satisfy these constraints.
Plain English Explanation
The paper focuses on helping unmanned aerial vehicles (UAVs) navigate through 3D environments while staying within certain limits, such as not moving too fast or accelerating too quickly. This is important because UAVs need to be able to follow pre-planned paths accurately, even with physical restrictions on their movement.
The researchers use a technique called model predictive control (MPC) to generate trajectories for the UAV that take these constraints into account. MPC allows the system to predict the future state of the UAV and adjust the current controls accordingly, ensuring the vehicle stays on the desired path.
By incorporating the UAV's physical limitations into the trajectory planning, the approach aims to enable more reliable and stable flight, which could be crucial for applications like search and rescue operations or aerial inspections where precise control is required.
Technical Explanation
The paper presents a model predictive control (MPC) framework for trajectory tracking of unmanned aerial vehicles (UAVs) in 3D spaces under motion constraints. The authors develop an MPC-based controller that can generate feasible trajectories for the UAV while considering limits on maximum speed and acceleration.
The proposed approach involves formulating the trajectory tracking problem as an optimization problem, where the objective is to minimize the deviation between the UAV's current state and the desired reference trajectory, subject to the UAV's kinematic and dynamic constraints. The MPC controller uses a receding horizon strategy to continuously update the control inputs and generate the next optimal trajectory segment.
The authors evaluate the performance of their approach through simulations, comparing it to a traditional proportional-integral-derivative (PID) controller. The results demonstrate that the MPC-based controller can more effectively track the desired trajectory while satisfying the imposed motion constraints, leading to improved tracking accuracy and stability.
Critical Analysis
The paper presents a promising approach for enabling UAVs to navigate complex 3D environments while adhering to physical limitations. The use of model predictive control to generate feasible trajectories is a well-established technique in the field of autonomous systems, and the authors have demonstrated its applicability to the specific problem of UAV trajectory tracking.
One potential limitation of the research is the reliance on simulation-based evaluation. While the simulation results are encouraging, it would be valuable to see the proposed approach tested on real-world UAV platforms to assess its performance in practical scenarios. Additionally, the paper does not provide in-depth analysis of the computational complexity and real-time implementation requirements of the MPC algorithm, which could be an important consideration for deploying the system on resource-constrained UAV hardware.
Further research could also explore the integration of the trajectory tracking approach with other UAV control and navigation modules, such as path planning or sensor-based guidance, to create a more comprehensive autonomous flight system.
Conclusion
This paper presents a model predictive control-based approach for trajectory tracking of unmanned aerial vehicles in 3D spaces, with a focus on satisfying motion constraints such as maximum speed and acceleration. The proposed method demonstrates improved tracking performance compared to traditional control techniques, which could be valuable for applications requiring precise UAV control, such as aerial search and rescue or inspection tasks.
While the simulation-based evaluation is encouraging, further research is needed to assess the practical implementation challenges and integrate the trajectory tracking approach with other UAV control and navigation modules. Nevertheless, this work contributes to the ongoing efforts to enhance the autonomy and reliability of unmanned aerial vehicles operating in complex 3D environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Trajectory Tracking for Unmanned Aerial Vehicles in 3D Spaces under Motion Constraints
Saurabh Kumar, Shashi Ranjan Kumar, Abhinav Sinha
This article presents a three-dimensional nonlinear trajectory tracking control strategy for unmanned aerial vehicles (UAVs) in the presence of spatial constraints. As opposed to many existing control strategies, which do not consider spatial constraints, the proposed strategy considers spatial constraints on each degree of freedom movement of the UAV. Such consideration makes the design appealing for many practical applications, such as pipeline inspection, boundary tracking, etc. The proposed design accounts for the limited information about the inertia matrix, thereby affirming its inherent robustness against unmodeled dynamics and other imperfections. We rigorously show that the UAV will converge to its desired path by maintaining bounded position, orientation, and linear and angular speeds. Finally, we demonstrate the effectiveness of the proposed strategy through various numerical simulations.
Read more7/16/2024

0
New!Three-dimensional Nonlinear Path-following Guidance with Bounded Input Constraints
Saurabh Kumar, Shashi Ranjan Kumar, Abhinav Sinha
In this paper, we consider the tracking of arbitrary curvilinear geometric paths in three-dimensional output spaces of unmanned aerial vehicles (UAVs) without pre-specified timing requirements, commonly referred to as path-following problems, subjected to bounded inputs. Specifically, we propose a novel nonlinear path-following guidance law for a UAV that enables it to follow any smooth curvilinear path in three dimensions while accounting for the bounded control authority in the design. The proposed solution offers a general treatment of the path-following problem by removing the dependency on the path's geometry, which makes it applicable to paths with varying levels of complexity and smooth curvatures. Additionally, the proposed strategy draws inspiration from the pursuit guidance approach, which is known for its simplicity and ease of implementation. Theoretical analysis guarantees that the UAV converges to its desired path within a fixed time and remains on it irrespective of its initial configuration with respect to the path. Finally, the simulations demonstrate the merits and effectiveness of the proposed guidance strategy through a wide range of engagement scenarios, showcasing the UAV's ability to follow diverse curvilinear paths accurately.
Read more9/16/2024
0
Model-Predictive Trajectory Generation for Autonomous Aerial Search and Coverage
Hugo Matias, Daniel Silvestre
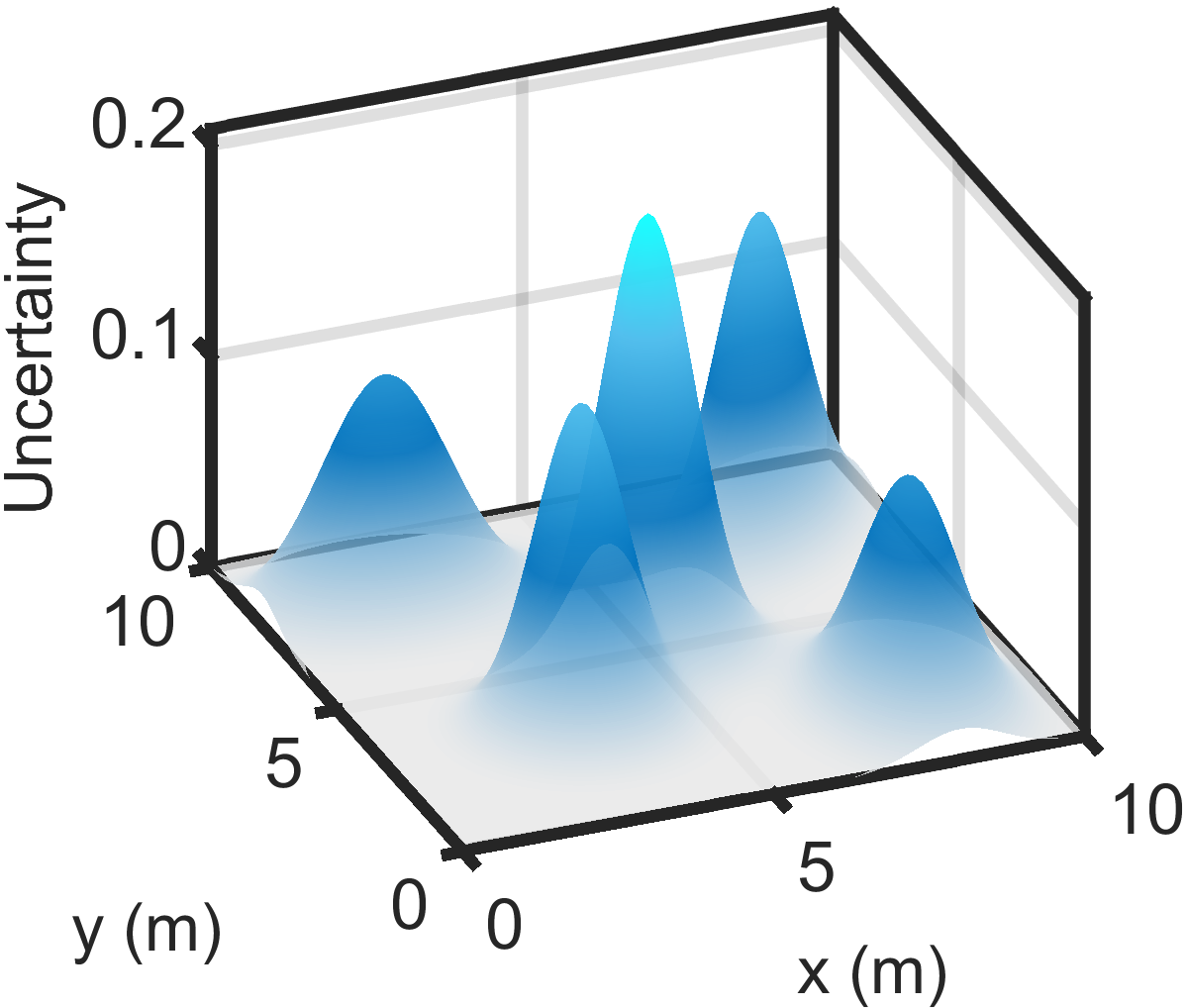
This paper addresses the trajectory planning problem for search and coverage missions with an Unmanned Aerial Vehicle (UAV). The objective is to devise optimal coverage trajectories based on a utility map describing prior region information, assumed to be effectively approximated by a Gaussian Mixture Model (GMM). We introduce a Model Predictive Control (MPC) algorithm employing a relaxed formulation that promotes the exploration of the map by preventing the UAV from revisiting previously covered areas. This is achieved by penalizing intersections between the UAV's visibility regions along its trajectory. The algorithm is assessed in MATLAB and validated in Gazebo, as well as in outdoor experimental tests. The results show that the proposed strategy can generate efficient and smooth trajectories for search and coverage missions.
Read more4/8/2024
👨🏫
0
3D Guidance Law for Maximal Coverage and Target Enclosing with Inherent Safety
Praveen Kumar Ranjan, Abhinav Sinha, Yongcan Cao
In this paper, we address the problem of enclosing an arbitrarily moving target in three dimensions by a single pursuer, which is an unmanned aerial vehicle (UAV), for maximum coverage while also ensuring the pursuer's safety by preventing collisions with the target. The proposed guidance strategy steers the pursuer to a safe region of space surrounding the target, allowing it to maintain a certain distance from the latter while offering greater flexibility in positioning and converging to any orbit within this safe zone. Our approach is distinguished by the use of nonholonomic constraints to model vehicles with accelerations serving as control inputs and coupled engagement kinematics to craft the pursuer's guidance law meticulously. Furthermore, we leverage the concept of the Lyapunov Barrier Function as a powerful tool to constrain the distance between the pursuer and the target within asymmetric bounds, thereby ensuring the pursuer's safety within the predefined region. To validate the efficacy and robustness of our algorithm, we conduct experimental tests by implementing a high-fidelity quadrotor model within Software-in-the-loop (SITL) simulations, encompassing various challenging target maneuver scenarios. The results obtained showcase the resilience of the proposed guidance law, effectively handling arbitrarily maneuvering targets, vehicle/autopilot dynamics, and external disturbances. Our method consistently delivers stable global enclosing behaviors, even in response to aggressive target maneuvers, and requires only relative information for successful execution.
Read more7/23/2024