Trust the PRoC3S: Solving Long-Horizon Robotics Problems with LLMs and Constraint Satisfaction
2406.05572
0
0
🔮
Abstract
Recent developments in pretrained large language models (LLMs) applied to robotics have demonstrated their capacity for sequencing a set of discrete skills to achieve open-ended goals in simple robotic tasks. In this paper, we examine the topic of LLM planning for a set of continuously parameterized skills whose execution must avoid violations of a set of kinematic, geometric, and physical constraints. We prompt the LLM to output code for a function with open parameters, which, together with environmental constraints, can be viewed as a Continuous Constraint Satisfaction Problem (CCSP). This CCSP can be solved through sampling or optimization to find a skill sequence and continuous parameter settings that achieve the goal while avoiding constraint violations. Additionally, we consider cases where the LLM proposes unsatisfiable CCSPs, such as those that are kinematically infeasible, dynamically unstable, or lead to collisions, and re-prompt the LLM to form a new CCSP accordingly. Experiments across three different simulated 3D domains demonstrate that our proposed strategy, PRoC3S, is capable of solving a wide range of complex manipulation tasks with realistic constraints on continuous parameters much more efficiently and effectively than existing baselines.
Create account to get full access
Overview
- This paper explores the use of large language models (LLMs) for planning and executing complex robotic tasks with continuous parameters and constraints.
- The authors propose a strategy called PRoC3S that prompts an LLM to generate code for a function with open parameters, which can be viewed as a Continuous Constraint Satisfaction Problem (CCSP).
- The CCSP is then solved through sampling or optimization to find a sequence of skills and continuous parameter settings that achieve the goal while avoiding constraint violations.
- Experiments in three different simulated 3D domains demonstrate the effectiveness of PRoC3S in solving complex manipulation tasks with realistic constraints.
Plain English Explanation
Large language models (LLMs) have shown promising results in robotics, demonstrating the ability to sequence a set of discrete skills to achieve open-ended goals in simple robotic tasks. This paper explores the use of LLMs for planning and executing more complex robotic tasks with continuously parameterized skills and a set of kinematic, geometric, and physical constraints.
The researchers propose a strategy called PRoC3S, which prompts the LLM to output code for a function with open parameters. These parameters, along with the environmental constraints, can be viewed as a Continuous Constraint Satisfaction Problem (CCSP). The CCSP can then be solved through sampling or optimization to find a sequence of skills and continuous parameter settings that achieve the goal while avoiding constraint violations.
Importantly, the researchers also consider cases where the LLM proposes unsatisfiable CCSPs, such as those that are kinematically infeasible, dynamically unstable, or lead to collisions. In these cases, the LLM is re-prompted to form a new CCSP that is more feasible.
The researchers conducted experiments across three different simulated 3D domains and found that their PRoC3S strategy is capable of solving a wide range of complex manipulation tasks with realistic constraints much more efficiently and effectively than existing baselines.
Technical Explanation
The key idea behind this research is to leverage the powerful language understanding and generation capabilities of large language models (LLMs) to guide the planning and execution of robotic tasks with continuously parameterized skills and a set of kinematic, geometric, and physical constraints.
The researchers propose a strategy called PRoC3S, which prompts the LLM to output code for a function with open parameters. These parameters, along with the environmental constraints, can be viewed as a Continuous Constraint Satisfaction Problem (CCSP). The CCSP can then be solved through sampling or optimization to find a sequence of skills and continuous parameter settings that achieve the goal while avoiding constraint violations.
To handle cases where the LLM proposes unsatisfiable CCSPs, the researchers re-prompt the LLM to form a new CCSP that is more feasible. This allows the system to iteratively refine the proposed solution until a satisfactory plan is generated.
The researchers evaluated PRoC3S across three different simulated 3D domains, including manipulation tasks, locomotion tasks, and a task involving learning reward functions for robot skills. The results demonstrate that PRoC3S is capable of solving a wide range of complex tasks with realistic constraints much more efficiently and effectively than existing baselines.
Critical Analysis
The researchers have presented a novel and promising approach to using LLMs for planning and executing complex robotic tasks with continuous parameters and constraints. However, there are a few caveats and limitations to consider:
-
Scalability: While the experiments demonstrate the effectiveness of PRoC3S in simulated environments, it remains to be seen how well the approach scales to more complex, real-world robotic tasks with a greater number of constraints and parameters.
-
Constraint Formulation: The success of the PRoC3S strategy relies on the ability to accurately formulate the CCSP based on the LLM's output. Improper formulation or incomplete constraint representations could lead to suboptimal or infeasible solutions.
-
Generalization: The paper does not explore the generalization capabilities of the proposed approach, i.e., how well the LLM-generated solutions transfer to new task instances or environments. This is an important area for further research.
-
Safety and Robustness: While the researchers consider cases where the LLM proposes unsatisfiable CCSPs, there may be other safety and robustness concerns that need to be addressed, especially when deploying these systems in real-world scenarios.
Despite these limitations, the researchers have made a significant contribution to the field of robotics by demonstrating the potential of LLMs for planning and executing complex robotic tasks with continuous parameters and constraints. Future work could explore ways to address the scalability, constraint formulation, generalization, and safety concerns to further enhance the practicality and reliability of this approach.
Conclusion
This paper presents a novel strategy called PRoC3S that leverages the power of large language models (LLMs) to plan and execute complex robotic tasks with continuously parameterized skills and a set of kinematic, geometric, and physical constraints. By prompting the LLM to generate code for a function with open parameters, the researchers are able to formulate a Continuous Constraint Satisfaction Problem (CCSP) that can be solved through sampling or optimization.
The experiments conducted across three different simulated 3D domains, including manipulation tasks, locomotion tasks, and learning reward functions for robot skills, demonstrate the effectiveness of PRoC3S in solving complex tasks with realistic constraints much more efficiently and effectively than existing baselines.
This research represents an important step forward in the integration of large language models and robotics, paving the way for more versatile and capable robotic systems that can adapt to a wide range of tasks and environments. As the field continues to evolve, further advancements in areas like scalability, generalization, and safety will be crucial to unlocking the full potential of these powerful AI-driven approaches.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
Plan-Seq-Learn: Language Model Guided RL for Solving Long Horizon Robotics Tasks
Murtaza Dalal, Tarun Chiruvolu, Devendra Chaplot, Ruslan Salakhutdinov
0
0
Large Language Models (LLMs) have been shown to be capable of performing high-level planning for long-horizon robotics tasks, yet existing methods require access to a pre-defined skill library (e.g. picking, placing, pulling, pushing, navigating). However, LLM planning does not address how to design or learn those behaviors, which remains challenging particularly in long-horizon settings. Furthermore, for many tasks of interest, the robot needs to be able to adjust its behavior in a fine-grained manner, requiring the agent to be capable of modifying low-level control actions. Can we instead use the internet-scale knowledge from LLMs for high-level policies, guiding reinforcement learning (RL) policies to efficiently solve robotic control tasks online without requiring a pre-determined set of skills? In this paper, we propose Plan-Seq-Learn (PSL): a modular approach that uses motion planning to bridge the gap between abstract language and learned low-level control for solving long-horizon robotics tasks from scratch. We demonstrate that PSL achieves state-of-the-art results on over 25 challenging robotics tasks with up to 10 stages. PSL solves long-horizon tasks from raw visual input spanning four benchmarks at success rates of over 85%, out-performing language-based, classical, and end-to-end approaches. Video results and code at https://mihdalal.github.io/planseqlearn/
5/3/2024
Long-horizon Locomotion and Manipulation on a Quadrupedal Robot with Large Language Models
Yutao Ouyang, Jinhan Li, Yunfei Li, Zhongyu Li, Chao Yu, Koushil Sreenath, Yi Wu
0
0
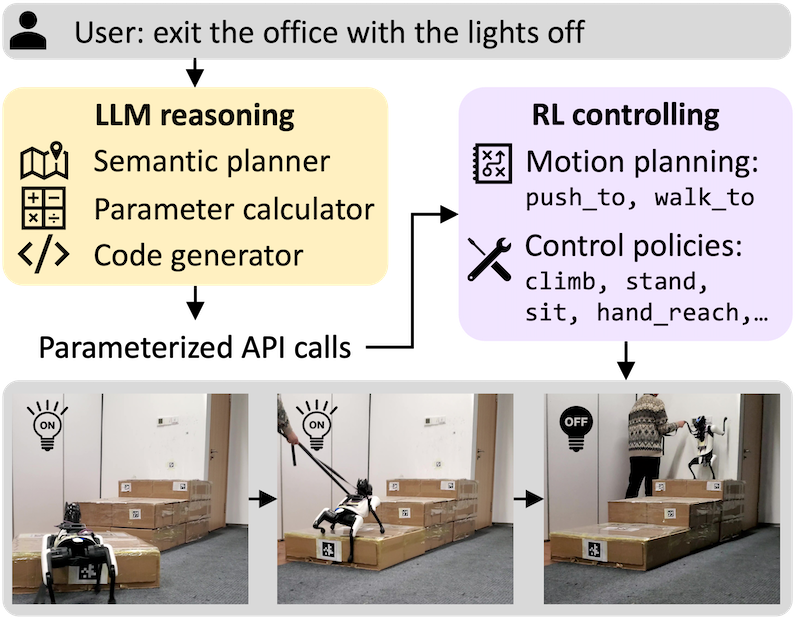
We present a large language model (LLM) based system to empower quadrupedal robots with problem-solving abilities for long-horizon tasks beyond short-term motions. Long-horizon tasks for quadrupeds are challenging since they require both a high-level understanding of the semantics of the problem for task planning and a broad range of locomotion and manipulation skills to interact with the environment. Our system builds a high-level reasoning layer with large language models, which generates hybrid discrete-continuous plans as robot code from task descriptions. It comprises multiple LLM agents: a semantic planner for sketching a plan, a parameter calculator for predicting arguments in the plan, and a code generator to convert the plan into executable robot code. At the low level, we adopt reinforcement learning to train a set of motion planning and control skills to unleash the flexibility of quadrupeds for rich environment interactions. Our system is tested on long-horizon tasks that are infeasible to complete with one single skill. Simulation and real-world experiments show that it successfully figures out multi-step strategies and demonstrates non-trivial behaviors, including building tools or notifying a human for help.
4/9/2024

LLM-based Robot Task Planning with Exceptional Handling for General Purpose Service Robots
Ruoyu Wang, Zhipeng Yang, Zinan Zhao, Xinyan Tong, Zhi Hong, Kun Qian
0
0
The development of a general purpose service robot for daily life necessitates the robot's ability to deploy a myriad of fundamental behaviors judiciously. Recent advancements in training Large Language Models (LLMs) can be used to generate action sequences directly, given an instruction in natural language with no additional domain information. However, while the outputs of LLMs are semantically correct, the generated task plans may not accurately map to acceptable actions and might encompass various linguistic ambiguities. LLM hallucinations pose another challenge for robot task planning, which results in content that is inconsistent with real-world facts or user inputs. In this paper, we propose a task planning method based on a constrained LLM prompt scheme, which can generate an executable action sequence from a command. An exceptional handling module is further proposed to deal with LLM hallucinations problem. This module can ensure the LLM-generated results are admissible in the current environment. We evaluate our method on the commands generated by the RoboCup@Home Command Generator, observing that the robot demonstrates exceptional performance in both comprehending instructions and executing tasks.
5/27/2024
📈
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
0
0
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
6/21/2024