TS40K: a 3D Point Cloud Dataset of Rural Terrain and Electrical Transmission System

0
🔗
Sign in to get full access
Overview
- This research paper focuses on the use of supervised learning algorithms in 3D scene understanding, with a focus on autonomous driving and indoor scene segmentation.
- The authors propose a new 3D point cloud dataset, TS40K, which encompasses over 40,000 km of electrical transmission systems in European rural terrain.
- This dataset offers 3D point clouds with distinct characteristics from those in self-driving and indoor 3D data, such as high point-density and no occlusion.
- The authors evaluate the performance of state-of-the-art methods on their dataset for 3D semantic segmentation and 3D object detection.
Plain English Explanation
The paper discusses the growing field of 3D scene understanding using supervised learning algorithms. This research is particularly important for autonomous driving and indoor scene analysis. However, the available 3D data for these tasks mainly focuses on urban environments.
To address this, the authors have created a new dataset called TS40K, which includes over 40,000 km of 3D point cloud data from electrical transmission systems in rural European terrain. This dataset has some unique characteristics, such as high point-density and no occlusion, which make it different from the 3D data commonly used for self-driving cars or indoor scenes.
The researchers then evaluate how well state-of-the-art 3D semantic segmentation and object detection models perform on their new dataset. This can help identify key challenges and opportunities in applying these techniques to the problem of power grid inspection, which is an important but high-risk task.
Technical Explanation
The authors of this paper present a novel 3D point cloud dataset called TS40K, which contains over 40,000 km of data from electrical transmission systems in rural European terrain. This dataset is distinct from the 3D data commonly used for autonomous driving and indoor scene segmentation, as it has high point-density and no occlusion.
The researchers evaluate the performance of state-of-the-art 3D semantic segmentation and object detection algorithms on the TS40K dataset. They find that while these models achieve reasonable results, there are some key challenges, such as the need to use labels that were not originally intended for learning tasks.
The authors argue that this dataset and the associated tasks can aid in the high-risk mission of power grid inspection, which is an important but understudied problem in the 3D scene understanding domain. By providing a new benchmark for evaluating 3D learning algorithms, the researchers hope to spur further advancements in this area.
Critical Analysis
The authors have made a valuable contribution by introducing the TS40K dataset, which offers a unique perspective on 3D scene understanding beyond the commonly studied urban and indoor scenarios. This dataset's focus on rural electrical transmission systems is a novel problem that could have significant real-world impact.
However, the paper does not delve deeply into the specific challenges and limitations of applying existing 3D learning algorithms to this domain. While the authors mention the need to use labels not originally intended for learning tasks, they could have provided more insight into the nature of these challenges and how they might be addressed.
Additionally, the paper does not explore the potential biases or representational issues that might arise from the geographic and environmental focus of the TS40K dataset. It would be interesting to see how the performance of these models might vary across different rural terrains or power grid infrastructures.
Overall, the research presented in this paper is a promising step towards expanding the frontiers of 3D scene understanding, but there is still room for further exploration and refinement of the methods and datasets used in this domain.
Conclusion
This research paper introduces a novel 3D point cloud dataset, TS40K, which focuses on electrical transmission systems in rural European terrain. The dataset offers unique characteristics, such as high point-density and no occlusion, that differentiate it from the 3D data commonly used for autonomous driving and indoor scene segmentation.
By evaluating state-of-the-art 3D learning algorithms on the TS40K dataset, the authors have highlighted both the potential and the challenges of applying these techniques to the problem of power grid inspection. This research represents an important step towards expanding the boundaries of 3D scene understanding and could have significant implications for the maintenance and monitoring of critical infrastructure.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔗
0
TS40K: a 3D Point Cloud Dataset of Rural Terrain and Electrical Transmission System
Diogo Lavado, Cl'audia Soares, Alessandra Micheletti, Ricardo Santos, Andr'e Coelho, Jo~ao Santos
Research on supervised learning algorithms in 3D scene understanding has risen in prominence and witness great increases in performance across several datasets. The leading force of this research is the problem of autonomous driving followed by indoor scene segmentation. However, openly available 3D data on these tasks mainly focuses on urban scenarios. In this paper, we propose TS40K, a 3D point cloud dataset that encompasses more than 40,000 Km on electrical transmission systems situated in European rural terrain. This is not only a novel problem for the research community that can aid in the high-risk mission of power-grid inspection, but it also offers 3D point clouds with distinct characteristics from those in self-driving and indoor 3D data, such as high point-density and no occlusion. In our dataset, each 3D point is labeled with 1 out of 22 annotated classes. We evaluate the performance of state-of-the-art methods on our dataset concerning 3D semantic segmentation and 3D object detection. Finally, we provide a comprehensive analysis of the results along with key challenges such as using labels that were not originally intended for learning tasks.
Read more5/24/2024
0
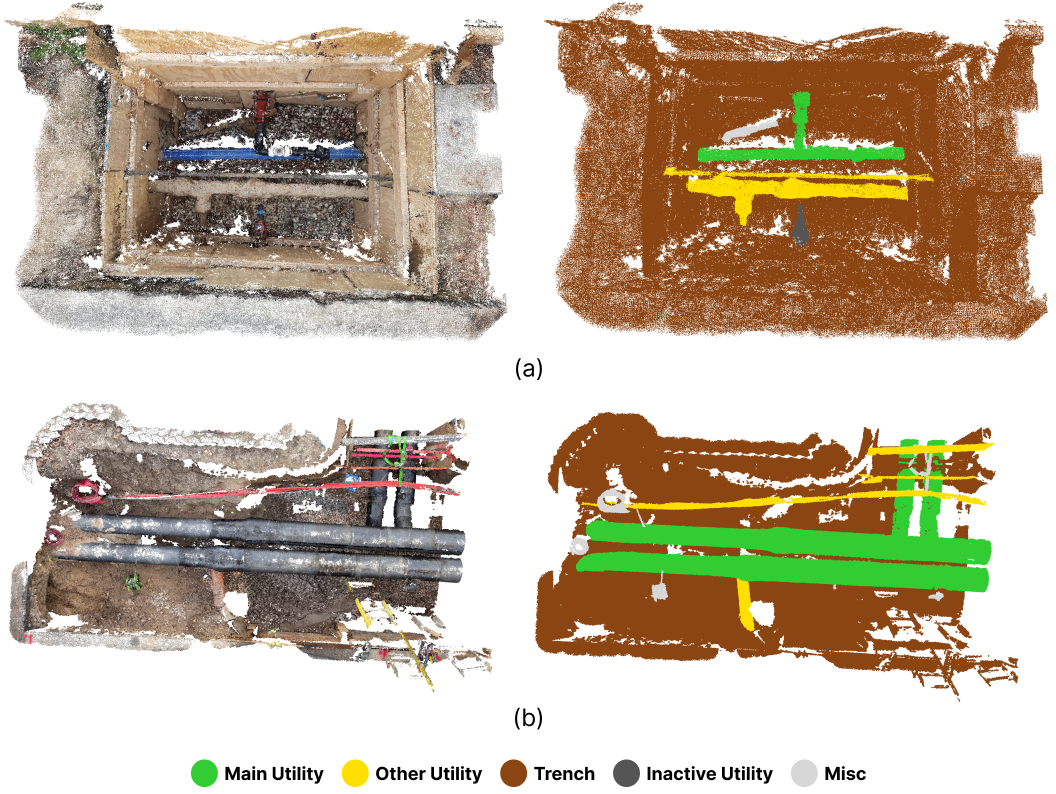
OpenTrench3D: A Photogrammetric 3D Point Cloud Dataset for Semantic Segmentation of Underground Utilities
Lasse H. Hansen, Simon B. Jensen, Mark P. Philipsen, Andreas M{o}gelmose, Lars Bodum, Thomas B. Moeslund
Identifying and classifying underground utilities is an important task for efficient and effective urban planning and infrastructure maintenance. We present OpenTrench3D, a novel and comprehensive 3D Semantic Segmentation point cloud dataset, designed to advance research and development in underground utility surveying and mapping. OpenTrench3D covers a completely novel domain for public 3D point cloud datasets and is unique in its focus, scope, and cost-effective capturing method. The dataset consists of 310 point clouds collected across 7 distinct areas. These include 5 water utility areas and 2 district heating utility areas. The inclusion of different geographical areas and main utilities (water and district heating utilities) makes OpenTrench3D particularly valuable for inter-domain transfer learning experiments. We provide benchmark results for the dataset using three state-of-the-art semantic segmentation models, PointNeXt, PointVector and PointMetaBase. Benchmarks are conducted by training on data from water areas, fine-tuning on district heating area 1 and evaluating on district heating area 2. The dataset is publicly available. With OpenTrench3D, we seek to foster innovation and progress in the field of 3D semantic segmentation in applications related to detection and documentation of underground utilities as well as in transfer learning methods in general.
Read more4/12/2024

0
ARCH2S: Dataset, Benchmark and Challenges for Learning Exterior Architectural Structures from Point Clouds
Ka Lung Cheung, Chi Chung Lee
Precise segmentation of architectural structures provides detailed information about various building components, enhancing our understanding and interaction with our built environment. Nevertheless, existing outdoor 3D point cloud datasets have limited and detailed annotations on architectural exteriors due to privacy concerns and the expensive costs of data acquisition and annotation. To overcome this shortfall, this paper introduces a semantically-enriched, photo-realistic 3D architectural models dataset and benchmark for semantic segmentation. It features 4 different building purposes of real-world buildings as well as an open architectural landscape in Hong Kong. Each point cloud is annotated into one of 14 semantic classes.
Read more6/4/2024
0
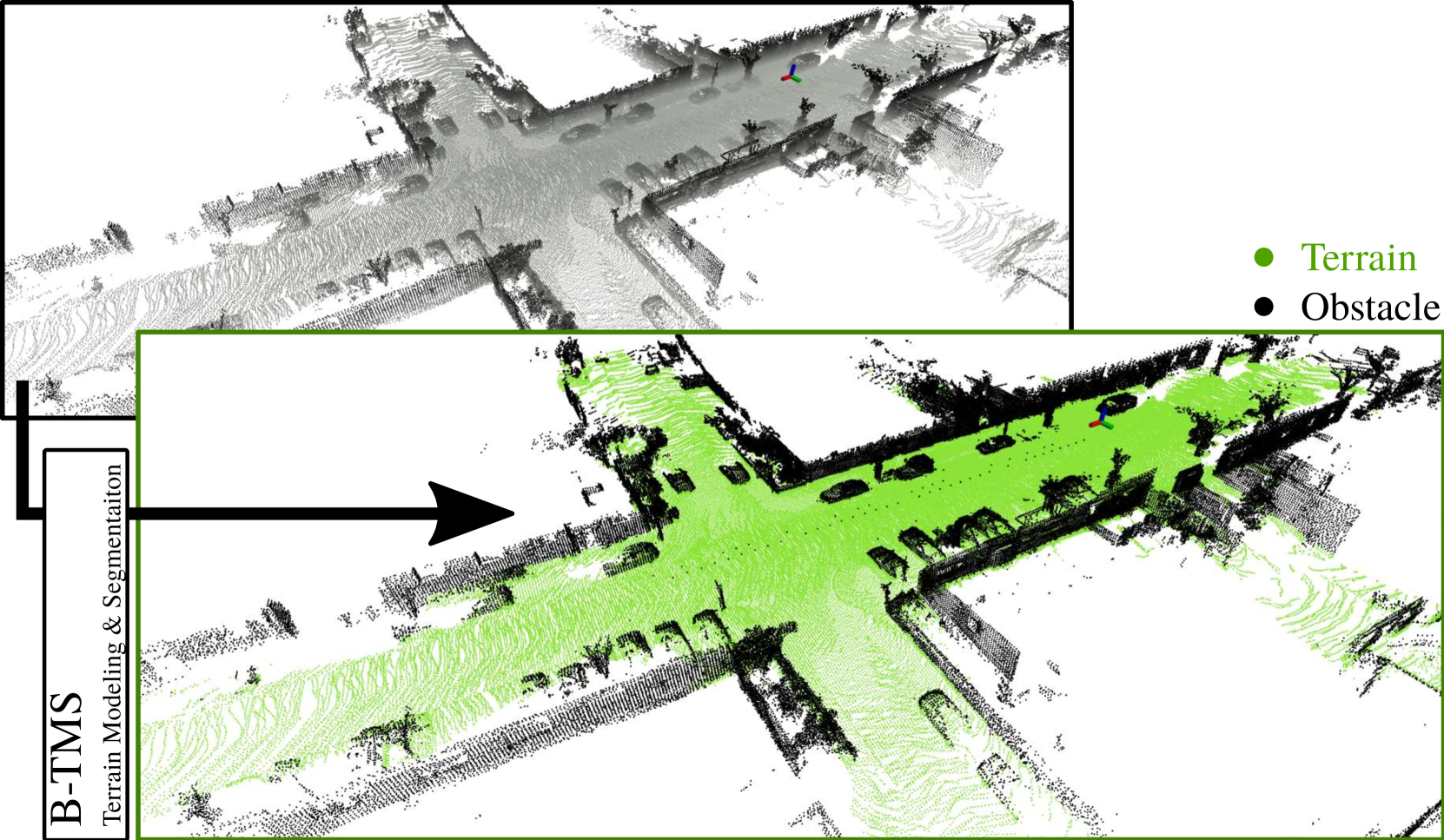
B-TMS: Bayesian Traversable Terrain Modeling and Segmentation Across 3D LiDAR Scans and Maps for Enhanced Off-Road Navigation
Minho Oh, Gunhee Shin, Seoyeon Jang, Seungjae Lee, Dongkyu Lee, Wonho Song, Byeongho Yu, Hyungtae Lim, Jaeyoung Lee, Hyun Myung
Recognizing traversable terrain from 3D point cloud data is critical, as it directly impacts the performance of autonomous navigation in off-road environments. However, existing segmentation algorithms often struggle with challenges related to changes in data distribution, environmental specificity, and sensor variations. Moreover, when encountering sunken areas, their performance is frequently compromised, and they may even fail to recognize them. To address these challenges, we introduce B-TMS, a novel approach that performs map-wise terrain modeling and segmentation by utilizing Bayesian generalized kernel (BGK) within the graph structure known as the tri-grid field (TGF). Our experiments encompass various data distributions, ranging from single scans to partial maps, utilizing both public datasets representing urban scenes and off-road environments, and our own dataset acquired from extremely bumpy terrains. Our results demonstrate notable contributions, particularly in terms of robustness to data distribution variations, adaptability to diverse environmental conditions, and resilience against the challenges associated with parameter changes.
Read more6/27/2024