Tube-RRT*: Efficient Homotopic Path Planning for Swarm Robotics Passing-Through Large-Scale Obstacle Environments
2404.09200
0
0
Abstract
Recently, the concept of optimal virtual tube has emerged as a novel solution to the challenging task of navigating obstacle-dense environments for swarm robotics, offering a wide ranging of applications. However, it lacks an efficient homotopic path planning method in obstacle-dense environments. This paper introduces Tube-RRT*, an innovative homotopic path planning method that builds upon and improves the Rapidly-exploring Random Tree (RRT) algorithm. Tube-RRT* is specifically designed to generate homotopic paths for the trajectories in the virtual tube, strategically considering opening volume and tube length to mitigate swarm congestion and ensure agile navigation. Through comprehensive comparative simulations conducted within complex, large-scale obstacle environments, we demonstrate the effectiveness of Tube-RRT*.
Create account to get full access
Overview
- The research paper proposes a new path planning algorithm called Tube-RRT* for swarm robotics in large-scale obstacle environments.
- The algorithm aims to find efficient homotopic paths for a swarm of robots to navigate through complex obstacle fields.
- The paper presents the algorithm's formulation, implementation, and evaluation through simulations and comparisons to existing methods.
Plain English Explanation
The paper introduces a new path planning algorithm called Tube-RRT* that is designed to help groups of robots, or "swarms," navigate through crowded environments with many obstacles. The key idea is to find efficient paths that allow the robots to pass through the obstacles without colliding with them.
Imagine you have a room full of furniture and you want to get a bunch of people from one side of the room to the other. You could just tell them to find their own way, but they might end up bumping into things or taking really long routes. The Tube-RRT* algorithm is like a GPS system that helps guide the people through the room in a more coordinated and efficient way.
The algorithm works by first mapping out all the obstacles in the environment, then planning paths for the robots that avoid those obstacles. It tries to find paths that are not just the shortest distance, but also the most efficient in terms of energy use and time. This is important for things like search and rescue missions or delivery robots, where you want the robots to be able to navigate quickly and safely.
The paper shows through simulations that the Tube-RRT* algorithm outperforms other path planning methods, allowing the swarm of robots to reach their destinations faster and more efficiently. This could be really useful for applications where you need a group of robots to work together to accomplish a task in a complex environment.
Technical Explanation
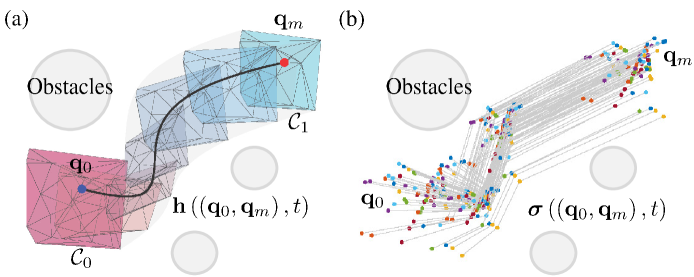
The Tube-RRT* algorithm builds upon the Rapidly-exploring Random Tree (RRT*) path planning method to find efficient homotopic paths for a swarm of robots in large-scale obstacle environments. [1, 2] Homotopic paths are those that can be continuously deformed into one another without colliding with obstacles.
The key innovations of Tube-RRT* are:
- Tube-based Representation: Instead of planning paths for individual robots, Tube-RRT* plans a "tube" that encloses a set of homotopic paths. This allows for more efficient and coordinated motion for the swarm.
- Bidirectional Search: The algorithm performs a bidirectional search, growing trees simultaneously from the start and goal positions. This can significantly reduce the time to find a feasible solution.
- Tube Optimization: Tube-RRT* optimizes the tube by iteratively adjusting the paths within it to minimize a cost function that considers factors like path length, clearance from obstacles, and robot energy consumption.
The algorithm is evaluated through simulations in complex, large-scale obstacle environments. The results show that Tube-RRT* outperforms individual RRT* planning as well as other state-of-the-art swarm path planning methods such as [3, 4, 5] in terms of success rate, path length, and computation time.
Critical Analysis
The authors acknowledge several limitations and potential areas for future research. First, the current implementation assumes a simplified robot model and does not consider robot dynamics or complex collision avoidance behaviors. Extending the algorithm to handle more realistic robot constraints and interactions would be an important next step.
Additionally, the paper only evaluates the algorithm in simulation environments. Validating the performance of Tube-RRT* on physical robotic platforms in real-world scenarios would be crucial to demonstrate its practical applicability.
The authors also note that the algorithm's performance may degrade in highly constrained environments with narrow passages or dead-ends. Developing strategies to better handle such challenging obstacle configurations could further improve the algorithm's robustness.
Overall, the Tube-RRT* algorithm presents a promising approach for efficient and coordinated path planning in cluttered environments. However, the limitations highlighted in the paper suggest that additional research and development are needed to fully realize its potential for real-world swarm robotics applications.
Conclusion
The Tube-RRT* algorithm introduced in this paper provides an efficient solution for homotopic path planning in large-scale obstacle environments. By planning a coordinated "tube" of paths for a swarm of robots, rather than individual trajectories, the algorithm can navigate complex scenarios more effectively than previous methods.
The simulated results demonstrate the algorithm's advantages in terms of success rate, path length, and computation time. While the current implementation has some limitations, the authors have highlighted promising directions for future research to address these challenges.
If further developed and validated on physical robotic platforms, Tube-RRT* could have significant implications for a wide range of swarm robotics applications, from search and rescue operations to autonomous delivery and transportation systems. The ability to coordinate the movement of multiple robots through cluttered environments in a safe and efficient manner could enable new levels of robustness and scalability for these types of real-world tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Homotopic Path Set Planning for Robot Manipulation and Navigation
Jing Huang, Yunxi Tang, Kwok Wai Samuel Au
0
0
This paper addresses path set planning that yields important applications in robot manipulation and navigation such as path generation for deformable object keypoints and swarms. A path set refers to the collection of finite agent paths to represent the overall spatial path of a group of keypoints or a swarm, whose collective properties meet spatial and topological constraints. As opposed to planning a single path, simultaneously planning multiple paths with constraints poses nontrivial challenges in complex environments. This paper presents a systematic planning pipeline for homotopic path sets, a widely applicable path set class in robotics. An extended visibility check condition is first proposed to attain a sparse passage distribution amidst dense obstacles. Passage-aware optimal path planning compatible with sampling-based planners is then designed for single path planning with adjustable costs. Large accessible free space for path set accommodation can be achieved by the planned path while having a sufficiently short path length. After specifying the homotopic properties of path sets, path set generation based on deformable path transfer is proposed in an efficient centralized manner. The effectiveness of these methods is validated by extensive simulated and experimental results.
6/6/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024
MINER-RRT*: A Hierarchical and Fast Trajectory Planning Framework in 3D Cluttered Environments
Pengyu Wang, Jiawei Tang, Hin Wang Lin, Fan Zhang, Chaoqun Wang, Jiankun Wang, Ling Shi, Max Q. -H. Meng
0
0
Trajectory planning for quadrotors in cluttered environments has been challenging in recent years. While many trajectory planning frameworks have been successful, there still exists potential for improvements, particularly in enhancing the speed of generating efficient trajectories. In this paper, we present a novel hierarchical trajectory planning framework to reduce computational time and memory usage called MINER-RRT*, which consists of two main components. First, we propose a sampling-based path planning method boosted by neural networks, where the predicted heuristic region accelerates the convergence of rapidly-exploring random trees. Second, we utilize the optimal conditions derived from the quadrotor's differential flatness properties to construct polynomial trajectories that minimize control effort in multiple stages. Extensive simulation and real-world experimental results demonstrate that, compared to several state-of-the-art (SOTA) approaches, our method can generate high-quality trajectories with better performance in 3D cluttered environments.
6/17/2024
A Comparative Study of Rapidly-exploring Random Tree Algorithms Applied to Ship Trajectory Planning and Behavior Generation
Trym Tengesdal, Tom Arne Pedersen, Tor Arne Johansen
0
0
Rapidly Exploring Random Tree (RRT) algorithms, notably used for nonholonomic vehicle navigation in complex environments, are often not thoroughly evaluated for their specific challenges. This paper presents a first such comparison study of the variants Potential-Quick RRT* (PQ-RRT*), Informed RRT* (IRRT*), RRT*, and RRT, in maritime single-query nonholonomic motion planning. Additionally, the practicalities of using these algorithms in maritime environments are discussed and outlined. We also contend that these algorithms are beneficial not only for trajectory planning in Collision Avoidance Systems (CAS) but also for CAS verification when used as vessel behavior generators. Optimal RRT variants tend to produce more distance-optimal paths but require more computational time due to complex tree wiring and nearest neighbor searches. Our findings, supported by Welch`s t-test at a significance level of Alpha = 0.05, indicate that PQ-RRT* slightly outperform IRRT* and RRT* in achieving shorter trajectory length but at the expense of higher tuning complexity and longer run-times. Based on the results, we argue that these RRT algorithms are better suited for smaller-scale problems or environments with low obstacle congestion ratio. This is attributed to the curse of dimensionality, and trade-off with available memory and computational resources.
4/19/2024