UAV Trajectory Planning with Path Processing

0

Sign in to get full access
Overview
- This paper presents a novel approach to UAV (Unmanned Aerial Vehicle) trajectory planning that incorporates path processing techniques.
- The proposed method uses a collocation-based nonlinear program to generate optimal trajectories for UAVs, taking into account various constraints and objectives.
- The authors demonstrate the effectiveness of their approach through simulations and experiments, highlighting its potential for real-world UAV applications.
Plain English Explanation
Unmanned Aerial Vehicles (UAVs) are becoming increasingly popular for a variety of applications, such as aerial photography, search and rescue operations, and infrastructure inspection. One of the key challenges in using UAVs is planning their trajectories, or the path they will take, in a way that is efficient and safe.
This research paper presents a new way to plan UAV trajectories that incorporates additional processing of the planned path. The researchers use a mathematical technique called "collocation" to generate an optimal trajectory for the UAV, taking into account factors like the vehicle's speed, the obstacles in its way, and the overall goal of the mission.
By adding this extra layer of path processing, the researchers were able to create trajectories that were more realistic and practical for real-world use. Through simulations and experiments, they showed that their approach could generate smooth, safe, and efficient trajectories for UAVs in a variety of scenarios.
This research could be particularly useful for applications where UAVs need to navigate complex environments, such as urban areas or disaster zones, where obstacles and other constraints must be carefully considered. By improving the way UAV trajectories are planned, this work has the potential to make these vehicles more reliable and effective in a wide range of practical settings.
Technical Explanation
The researchers formulate the UAV trajectory planning problem as a nonlinear optimization problem, where the goal is to find the optimal sequence of states (e.g., position, velocity, acceleration) that the UAV should follow to reach its destination while satisfying various constraints.
To solve this problem, the authors use a collocation-based approach, which discretizes the trajectory into a series of points and enforces the dynamical constraints at these points. This allows them to transform the continuous-time optimal control problem into a finite-dimensional nonlinear program that can be solved efficiently using off-the-shelf optimization solvers.
One key aspect of the proposed method is the incorporation of path processing techniques, which aim to smooth and refine the optimized trajectory. Specifically, the authors apply a Bézier curve fitting algorithm to the raw, optimized trajectory to generate a more realistic and flyable path for the UAV.
The researchers validate their approach through simulations and real-world experiments, demonstrating its ability to generate safe and efficient trajectories for UAVs navigating complex environments with obstacles. They compare their method to other state-of-the-art trajectory planning algorithms, showcasing its superior performance in terms of metrics such as path length, energy consumption, and constraint satisfaction.
Critical Analysis
The paper presents a thorough and well-designed study, with a clear problem formulation, a comprehensive solution approach, and a rigorous evaluation. The authors' use of the collocation-based nonlinear programming framework is a sound and established technique in the field of optimal control, and their addition of path processing methods helps to address practical considerations for real-world UAV operations.
One potential limitation of the research is the reliance on simulations and a limited set of experiments to validate the proposed method. While the authors do demonstrate its effectiveness in these controlled settings, further testing in more complex, real-world environments would be valuable to fully assess the method's robustness and generalizability.
Additionally, the paper does not delve into the computational complexity and scalability of the proposed approach, which could be an important consideration for large-scale UAV applications with many vehicles and dynamic obstacles. Exploring ways to improve the efficiency and scalability of the trajectory planning algorithm could be an area for future research.
Overall, this work represents a significant contribution to the field of UAV trajectory planning, and the authors' novel integration of path processing techniques is a promising step towards developing more practical and reliable trajectory planning solutions for aerial robotics. Further research and validation in more diverse scenarios could help to solidify the advantages and limitations of this approach.
Conclusion
This research paper presents a novel approach to UAV trajectory planning that combines collocation-based nonlinear programming with path processing techniques. By optimizing the UAV's trajectory while also smoothing and refining the resulting path, the authors have developed a method that can generate safe, efficient, and realistic trajectories for UAVs navigating complex environments.
The key contribution of this work is the integration of path processing into the trajectory planning framework, which helps to address practical considerations for real-world UAV operations. Through simulations and experiments, the authors have demonstrated the effectiveness of their approach, paving the way for improved UAV performance and reliability in a variety of applications, such as aerial photography, search and rescue, and infrastructure inspection.
As UAVs continue to play an increasingly important role in various industries and domains, the development of robust and efficient trajectory planning algorithms will become even more crucial. This research represents an important step forward in this direction, and the insights and techniques presented here could inspire further advancements in the field of aerial robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UAV Trajectory Planning with Path Processing
Zdenv{e}k Bouv{c}ek, Miroslav Fl'idr, Ondv{r}ej Straka
This paper examines the influence of initial guesses on trajectory planning for Unmanned Aerial Vehicles (UAVs) formulated in terms of Optimal Control Problem (OCP). The OCP is solved numerically using the Pseudospectral collocation method. Our approach leverages a path identified through Lazy Theta* and incorporates known constraints and a model of the UAV's behavior for the initial guess. Our findings indicate that a suitable initial guess has a beneficial influence on the planned trajectory. They also suggest promising directions for future research.
Read more7/2/2024
0
Model-Predictive Trajectory Generation for Autonomous Aerial Search and Coverage
Hugo Matias, Daniel Silvestre
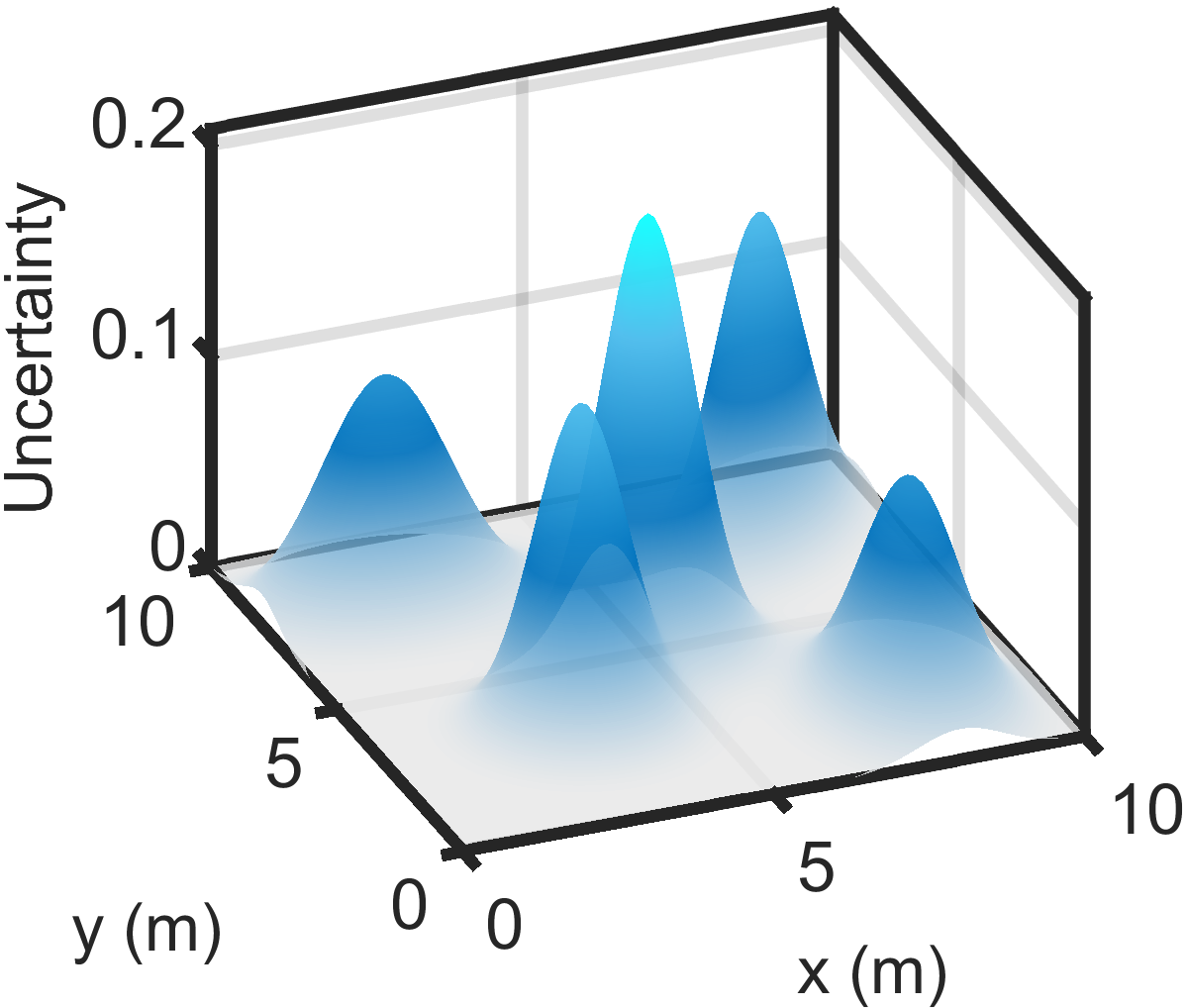
This paper addresses the trajectory planning problem for search and coverage missions with an Unmanned Aerial Vehicle (UAV). The objective is to devise optimal coverage trajectories based on a utility map describing prior region information, assumed to be effectively approximated by a Gaussian Mixture Model (GMM). We introduce a Model Predictive Control (MPC) algorithm employing a relaxed formulation that promotes the exploration of the map by preventing the UAV from revisiting previously covered areas. This is achieved by penalizing intersections between the UAV's visibility regions along its trajectory. The algorithm is assessed in MATLAB and validated in Gazebo, as well as in outdoor experimental tests. The results show that the proposed strategy can generate efficient and smooth trajectories for search and coverage missions.
Read more4/8/2024

0
Trajectory Tracking for Unmanned Aerial Vehicles in 3D Spaces under Motion Constraints
Saurabh Kumar, Shashi Ranjan Kumar, Abhinav Sinha
This article presents a three-dimensional nonlinear trajectory tracking control strategy for unmanned aerial vehicles (UAVs) in the presence of spatial constraints. As opposed to many existing control strategies, which do not consider spatial constraints, the proposed strategy considers spatial constraints on each degree of freedom movement of the UAV. Such consideration makes the design appealing for many practical applications, such as pipeline inspection, boundary tracking, etc. The proposed design accounts for the limited information about the inertia matrix, thereby affirming its inherent robustness against unmodeled dynamics and other imperfections. We rigorously show that the UAV will converge to its desired path by maintaining bounded position, orientation, and linear and angular speeds. Finally, we demonstrate the effectiveness of the proposed strategy through various numerical simulations.
Read more7/16/2024

0
New!Three-dimensional Nonlinear Path-following Guidance with Bounded Input Constraints
Saurabh Kumar, Shashi Ranjan Kumar, Abhinav Sinha
In this paper, we consider the tracking of arbitrary curvilinear geometric paths in three-dimensional output spaces of unmanned aerial vehicles (UAVs) without pre-specified timing requirements, commonly referred to as path-following problems, subjected to bounded inputs. Specifically, we propose a novel nonlinear path-following guidance law for a UAV that enables it to follow any smooth curvilinear path in three dimensions while accounting for the bounded control authority in the design. The proposed solution offers a general treatment of the path-following problem by removing the dependency on the path's geometry, which makes it applicable to paths with varying levels of complexity and smooth curvatures. Additionally, the proposed strategy draws inspiration from the pursuit guidance approach, which is known for its simplicity and ease of implementation. Theoretical analysis guarantees that the UAV converges to its desired path within a fixed time and remains on it irrespective of its initial configuration with respect to the path. Finally, the simulations demonstrate the merits and effectiveness of the proposed guidance strategy through a wide range of engagement scenarios, showcasing the UAV's ability to follow diverse curvilinear paths accurately.
Read more9/16/2024