ULOC: Learning to Localize in Complex Large-Scale Environments with Ultra-Wideband Ranges

0
Sign in to get full access
Overview
- The paper proposes a learning-based approach called ULOC for localizing agents in complex large-scale environments using Ultra-Wideband (UWB) range measurements.
- ULOC leverages the strengths of UWB sensing and deep learning to enable robust localization in challenging settings.
- The system demonstrates improved performance compared to traditional methods, making it useful for applications like augmented reality, robotics, and location-based services.
Plain English Explanation
ULOC is a new way to figure out where things are located, even in complicated and large spaces. It uses a technology called Ultra-Wideband (UWB) that can measure distances really accurately. ULOC combines this UWB data with deep learning, which is a type of artificial intelligence.
By using both UWB and deep learning, ULOC can locate things better than older methods, especially in difficult environments. This could be helpful for things like augmented reality, where digital objects need to be placed precisely in the real world, or robots that need to know their exact location. It could also improve location-based services that rely on knowing where people or devices are.
Technical Explanation
The key innovation of ULOC is its ability to effectively leverage UWB range measurements and deep learning for robust localization in complex large-scale environments. UWB provides highly accurate ranging data, but traditional methods struggle with challenges like multipath interference and occlusions in cluttered spaces.
ULOC addresses these issues by using a deep neural network architecture that can learn to map the UWB range measurements to accurate agent positions. The network is trained on simulated data to learn the complex relationships between the UWB ranges and the true agent poses. During inference, ULOC takes the UWB measurements as input and outputs the estimated agent locations.
The authors demonstrate ULOC's performance on both simulated and real-world datasets, showing significant improvements over prior UWB-based localization approaches. For example, in a large-scale indoor environment with many obstacles, ULOC achieved over 50% better localization accuracy compared to a state-of-the-art UWB-only method.
Critical Analysis
The ULOC paper presents a compelling approach to addressing the challenges of localization in complex, large-scale environments using UWB sensing and deep learning. The key strengths of the work include:
- Leveraging the strengths of both UWB and deep learning to overcome the limitations of traditional UWB-only methods
- Demonstrating robust performance in simulated and real-world experiments, including challenging indoor settings
- Providing a flexible, learning-based framework that can potentially be extended to other sensing modalities beyond UWB
However, some potential limitations and areas for further research include:
- The reliance on simulated training data, which may not fully capture the nuances of real-world environments. Incorporating more real-world training data could further improve the model's generalization.
- The need for a dense network of UWB anchors to provide sufficient coverage, which could be costly to deploy in large-scale settings.
- The potential for performance degradation in dynamic environments with moving obstacles or agents, which was not extensively evaluated in the paper.
Overall, the ULOC approach represents an important step forward in enabling robust and accurate localization in complex, real-world settings, with promising applications in augmented reality, robotics, and location-based services.
Conclusion
The ULOC paper presents a novel deep learning-based approach for localizing agents in complex, large-scale environments using Ultra-Wideband (UWB) range measurements. By combining the strengths of UWB sensing and deep learning, ULOC demonstrates significant improvements in localization accuracy over traditional UWB-only methods, particularly in challenging indoor settings with occlusions and multipath interference.
The ability to accurately localize agents in such complex environments has important implications for a variety of applications, including augmented reality, robotics, and location-based services. While the current work shows promising results, further research is needed to address potential limitations, such as the reliance on simulated training data and the need for dense UWB anchor deployments.
Overall, the ULOC approach represents an important advancement in the field of localization, and its success highlights the potential of integrating advanced sensing technologies with deep learning to tackle complex real-world challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ULOC: Learning to Localize in Complex Large-Scale Environments with Ultra-Wideband Ranges
Thien-Minh Nguyen, Yizhuo Yang, Tien-Dat Nguyen, Shenghai Yuan, Lihua Xie
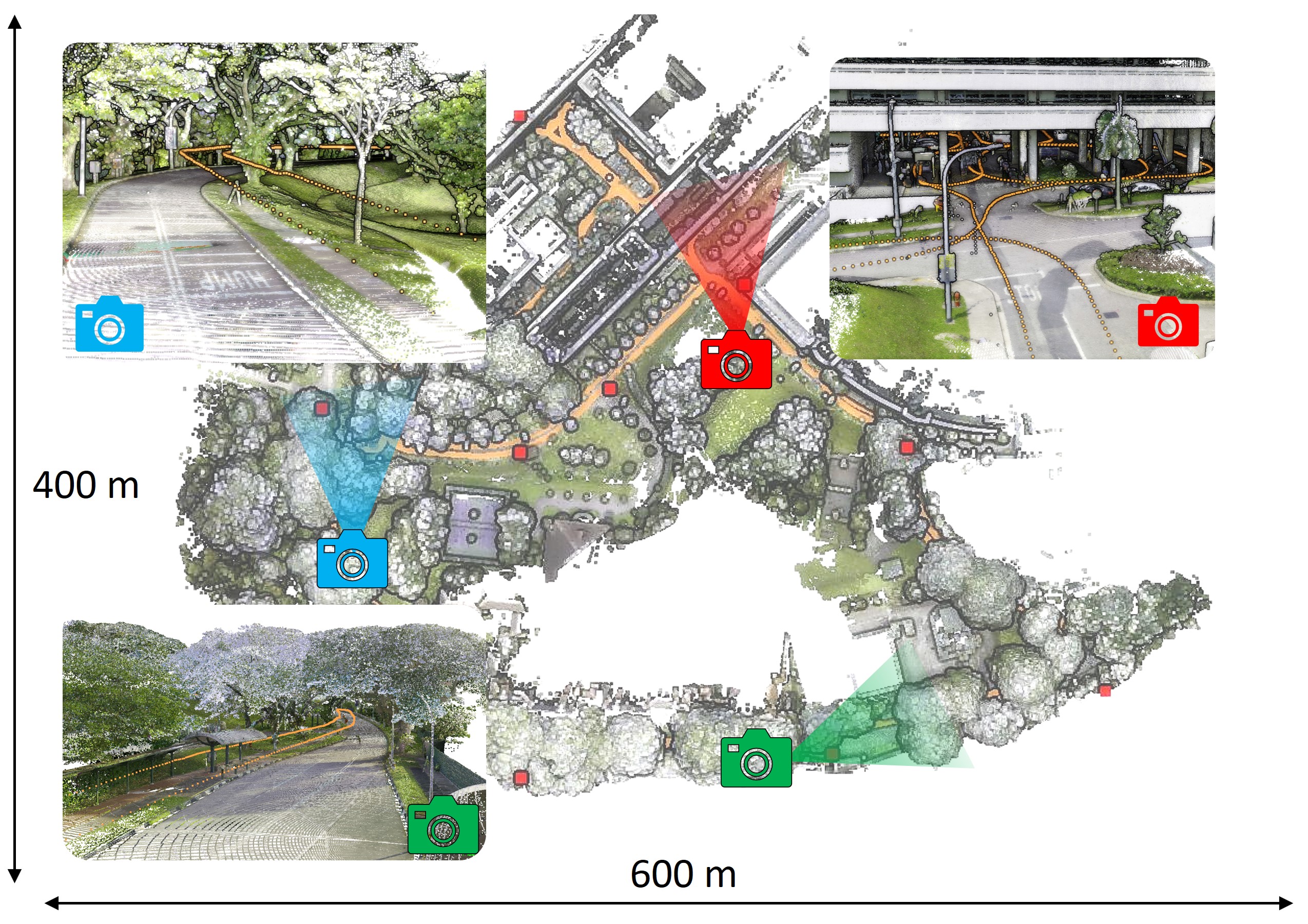
While UWB-based methods can achieve high localization accuracy in small-scale areas, their accuracy and reliability are significantly challenged in large-scale environments. In this paper, we propose a learning-based framework named ULOC for Ultra-Wideband (UWB) based localization in such complex large-scale environments. First, anchors are deployed in the environment without knowledge of their actual position. Then, UWB observations are collected when the vehicle travels in the environment. At the same time, map-consistent pose estimates are developed from registering (onboard self-localization) data with the prior map to provide the training labels. We then propose a network based on MAMBA that learns the ranging patterns of UWBs over a complex large-scale environment. The experiment demonstrates that our solution can ensure high localization accuracy on a large scale compared to the state-of-the-art. We release our source code to benefit the community at https://github.com/brytsknguyen/uloc.
Read more9/18/2024
🔄
0
XRLoc: Accurate UWB Localization to Realize XR Deployments
Aditya Arun, Shunsuke Saruwatari, Sureel Shah, Dinesh Bharadia
Understanding the location of ultra-wideband (UWB) tag-attached objects and people in the real world is vital to enabling a smooth cyber-physical transition. However, most UWB localization systems today require multiple anchors in the environment, which can be very cumbersome to set up. In this work, we develop XRLoc, providing an accuracy of a few centimeters in many real-world scenarios. This paper will delineate the key ideas which allow us to overcome the fundamental restrictions that plague a single anchor point from localization of a device to within an error of a few centimeters. We deploy a VR chess game using everyday objects as a demo and find that our system achieves $2.4$ cm median accuracy and $5.3$ cm $90^mathrm{th}$ percentile accuracy in dynamic scenarios, performing at least $8times$ better than state-of-art localization systems. Additionally, we implement a MAC protocol to furnish these locations for over $10$ tags at update rates of $100$ Hz, with a localization latency of $sim 1$ ms.
Read more5/6/2024

0
Multi-Robot Collaborative Localization and Planning with Inter-Ranging
Derek Knowles, Adam Dai, Grace Gao
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common anchor and tag UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
Read more6/26/2024

0
Semi-Supervised Novelty Detection for Precise Ultra-Wideband Error Signal Prediction
Umberto Albertin, Alessandro Navone, Mauro Martini, Marcello Chiaberge
Ultra-Wideband (UWB) technology is an emerging low-cost solution for localization in a generic environment. However, UWB signal can be affected by signal reflections and non-line-of-sight (NLoS) conditions between anchors; hence, in a broader sense, the specific geometry of the environment and the disposition of obstructing elements in the map may drastically hinder the reliability of UWB for precise robot localization. This work aims to mitigate this problem by learning a map-specific characterization of the UWB quality signal with a fingerprint semi-supervised novelty detection methodology. An unsupervised autoencoder neural network is trained on nominal UWB map conditions, and then it is used to predict errors derived from the introduction of perturbing novelties in the environment. This work poses a step change in the understanding of UWB localization and its reliability in evolving environmental conditions. The resulting performance of the proposed method is proved by fine-grained experiments obtained with a visual tracking ground truth.
Read more4/9/2024