Uncertainty Quantification with Deep Ensembles for 6D Object Pose Estimation
2403.07741
0
0

Abstract
The estimation of 6D object poses is a fundamental task in many computer vision applications. Particularly, in high risk scenarios such as human-robot interaction, industrial inspection, and automation, reliable pose estimates are crucial. In the last years, increasingly accurate and robust deep-learning-based approaches for 6D object pose estimation have been proposed. Many top-performing methods are not end-to-end trainable but consist of multiple stages. In the context of deep uncertainty quantification, deep ensembles are considered as state of the art since they have been proven to produce well-calibrated and robust uncertainty estimates. However, deep ensembles can only be applied to methods that can be trained end-to-end. In this work, we propose a method to quantify the uncertainty of multi-stage 6D object pose estimation approaches with deep ensembles. For the implementation, we choose SurfEmb as representative, since it is one of the top-performing 6D object pose estimation approaches in the BOP Challenge 2022. We apply established metrics and concepts for deep uncertainty quantification to evaluate the results. Furthermore, we propose a novel uncertainty calibration score for regression tasks to quantify the quality of the estimated uncertainty.
Create account to get full access
Overview
- This paper explores the use of deep ensembles to estimate 6D object pose with quantified uncertainty.
- 6D object pose estimation is an important task in computer vision and robotics, with applications in areas like augmented reality, 3D human pose estimation, and robotic manipulation.
- Quantifying the uncertainty in pose estimates is crucial for practical applications, as it allows the system to reason about the reliability of its predictions.
- The paper proposes an approach based on deep ensembles, which trains multiple neural networks to model the distribution of possible 6D poses for a given input.
Plain English Explanation
This research looks at a way to estimate the 3D position and orientation (called 6D pose) of objects using deep learning models, and also quantify how certain the model is about its predictions. Estimating the 6D pose of objects is an important task in computer vision and robotics, with applications in things like augmented reality, 3D human pose estimation, and robotic manipulation.
Knowing how certain the model is about its 6D pose predictions is crucial for practical applications, as it allows the system to reason about whether it can rely on the predictions or if it needs to get more information. The researchers propose using an approach called "deep ensembles", which trains multiple neural networks to model the range of possible 6D poses for a given input. This allows the system to not just give a single prediction, but to output a distribution that represents the uncertainty in the estimate.
Technical Explanation
The paper presents a method for 6D object pose estimation that uses deep ensembles to quantify the uncertainty in the predictions. Deep ensembles work by training multiple neural networks, each of which outputs its own estimate of the 6D pose. By examining the distribution of outputs from the ensemble, the system can quantify how certain or uncertain it is about the predicted pose.
The key elements of the approach include:
- Training an ensemble of neural networks to predict 6D object poses
- Using the distribution of outputs from the ensemble to compute uncertainty metrics like variance
- Incorporating this uncertainty information into the overall pose estimation pipeline
The paper evaluates the proposed method on standard 6D pose estimation benchmarks, showing that it can achieve state-of-the-art performance while also providing meaningful uncertainty quantification. This allows the system to reason about the reliability of its predictions, which is crucial for real-world applications like robotic manipulation and 3D human pose estimation.
Critical Analysis
The paper provides a thorough evaluation of the proposed deep ensemble approach, but there are a few potential limitations and areas for further research:
-
The method assumes that the distribution of outputs from the ensemble accurately reflects the true uncertainty in the 6D pose estimates. In practice, there may be systematic biases or other factors that cause the ensemble to under- or over-estimate the true uncertainty.
-
The paper focuses on evaluating the uncertainty quantification on standard benchmarks, but more research is needed to understand how the method performs in real-world, ambiguous scenarios where uncertainty estimation is most crucial.
-
The computational overhead of training and evaluating multiple neural networks in an ensemble may be a practical limitation for some applications. Further research could explore ways to balance accuracy, uncertainty quantification, and computational efficiency.
Overall, the paper presents a promising approach for 6D object pose estimation with uncertainty quantification, but more work is needed to fully understand its strengths, limitations, and practical implications.
Conclusion
This research explores the use of deep ensembles to estimate 6D object poses while also quantifying the uncertainty in the predictions. Knowing the uncertainty in 6D pose estimates is crucial for real-world applications like augmented reality, robotic manipulation, and 3D human pose estimation.
The proposed deep ensemble approach shows promise in achieving state-of-the-art performance while also providing meaningful uncertainty quantification. However, further research is needed to fully understand the method's strengths, limitations, and practical implications, especially in ambiguous real-world scenarios. Overall, this work represents an important step towards reliable and robust 6D object pose estimation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
Deep Learning-Based Object Pose Estimation: A Comprehensive Survey
Jian Liu, Wei Sun, Hui Yang, Zhiwen Zeng, Chongpei Liu, Jin Zheng, Xingyu Liu, Hossein Rahmani, Nicu Sebe, Ajmal Mian
0
0
Object pose estimation is a fundamental computer vision problem with broad applications in augmented reality and robotics. Over the past decade, deep learning models, due to their superior accuracy and robustness, have increasingly supplanted conventional algorithms reliant on engineered point pair features. Nevertheless, several challenges persist in contemporary methods, including their dependency on labeled training data, model compactness, robustness under challenging conditions, and their ability to generalize to novel unseen objects. A recent survey discussing the progress made on different aspects of this area, outstanding challenges, and promising future directions, is missing. To fill this gap, we discuss the recent advances in deep learning-based object pose estimation, covering all three formulations of the problem, emph{i.e.}, instance-level, category-level, and unseen object pose estimation. Our survey also covers multiple input data modalities, degrees-of-freedom of output poses, object properties, and downstream tasks, providing the readers with a holistic understanding of this field. Additionally, it discusses training paradigms of different domains, inference modes, application areas, evaluation metrics, and benchmark datasets, as well as reports the performance of current state-of-the-art methods on these benchmarks, thereby facilitating the readers in selecting the most suitable method for their application. Finally, the survey identifies key challenges, reviews the prevailing trends along with their pros and cons, and identifies promising directions for future research. We also keep tracing the latest works at https://github.com/CNJianLiu/Awesome-Object-Pose-Estimation.
6/3/2024
Uncertainty modeling for fine-tuned implicit functions
Anna Susmelj, Mael Macuglia, Natav{s}a Tagasovska, Reto Sutter, Sebastiano Caprara, Jean-Philippe Thiran, Ender Konukoglu
0
0
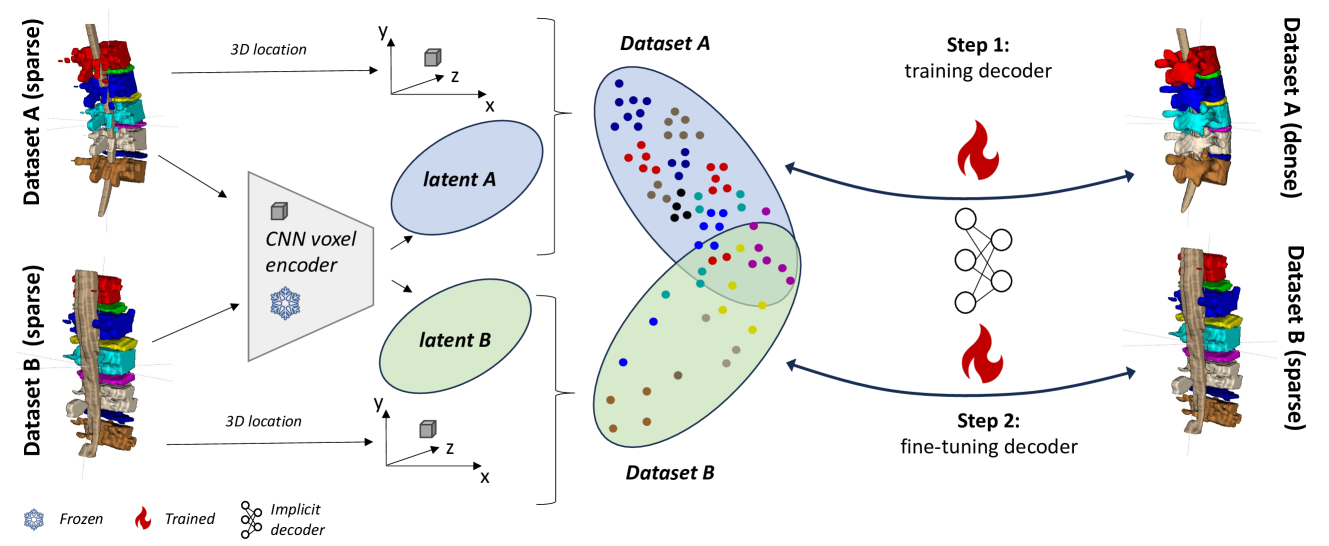
Implicit functions such as Neural Radiance Fields (NeRFs), occupancy networks, and signed distance functions (SDFs) have become pivotal in computer vision for reconstructing detailed object shapes from sparse views. Achieving optimal performance with these models can be challenging due to the extreme sparsity of inputs and distribution shifts induced by data corruptions. To this end, large, noise-free synthetic datasets can serve as shape priors to help models fill in gaps, but the resulting reconstructions must be approached with caution. Uncertainty estimation is crucial for assessing the quality of these reconstructions, particularly in identifying areas where the model is uncertain about the parts it has inferred from the prior. In this paper, we introduce Dropsembles, a novel method for uncertainty estimation in tuned implicit functions. We demonstrate the efficacy of our approach through a series of experiments, starting with toy examples and progressing to a real-world scenario. Specifically, we train a Convolutional Occupancy Network on synthetic anatomical data and test it on low-resolution MRI segmentations of the lumbar spine. Our results show that Dropsembles achieve the accuracy and calibration levels of deep ensembles but with significantly less computational cost.
6/19/2024
Tiny Deep Ensemble: Uncertainty Estimation in Edge AI Accelerators via Ensembling Normalization Layers with Shared Weights
Soyed Tuhin Ahmed, Michael Hefenbrock, Mehdi B. Tahoori
0
0
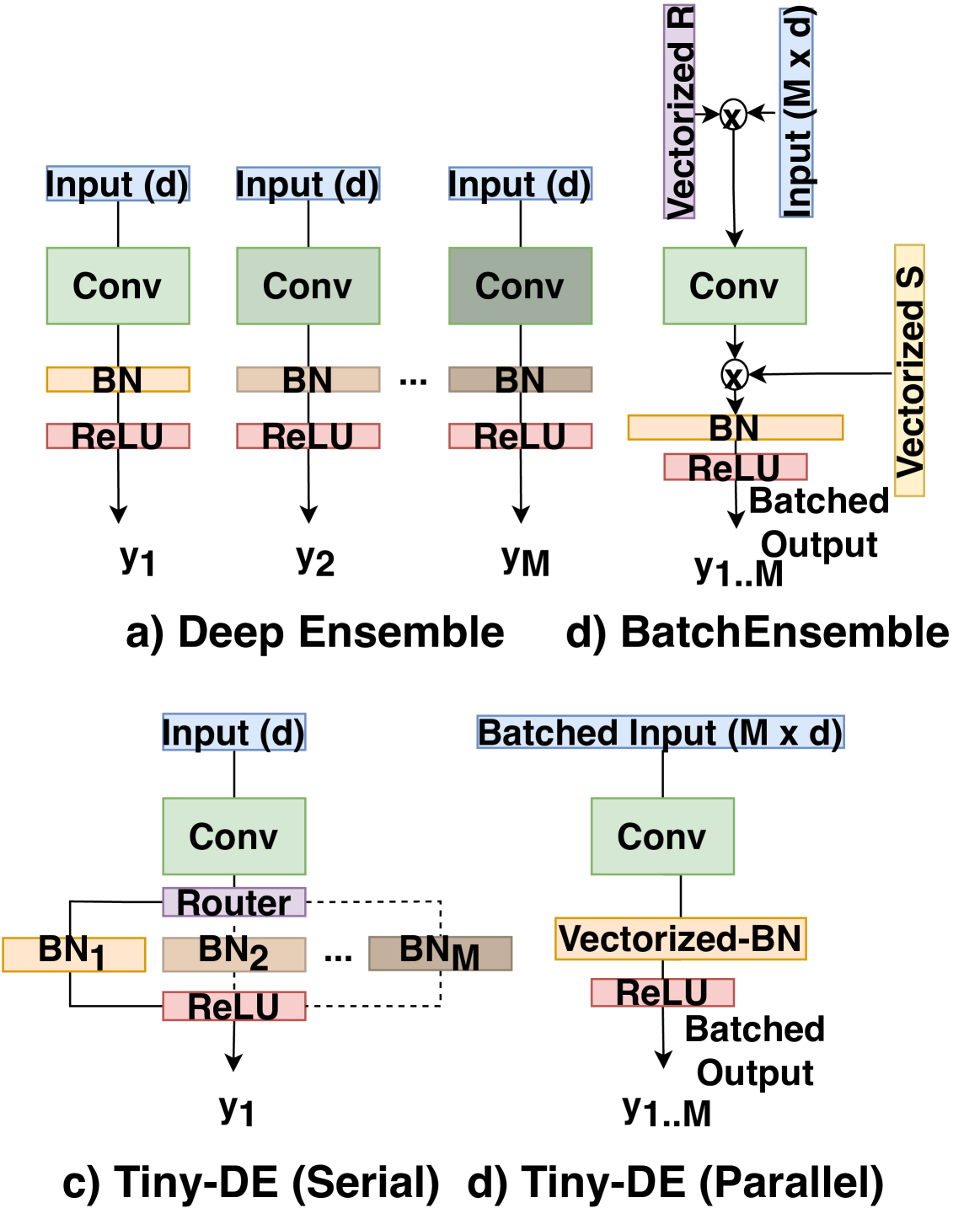
The applications of artificial intelligence (AI) are rapidly evolving, and they are also commonly used in safety-critical domains, such as autonomous driving and medical diagnosis, where functional safety is paramount. In AI-driven systems, uncertainty estimation allows the user to avoid overconfidence predictions and achieve functional safety. Therefore, the robustness and reliability of model predictions can be improved. However, conventional uncertainty estimation methods, such as the deep ensemble method, impose high computation and, accordingly, hardware (latency and energy) overhead because they require the storage and processing of multiple models. Alternatively, Monte Carlo dropout (MC-dropout) methods, although having low memory overhead, necessitate numerous ($sim 100$) forward passes, leading to high computational overhead and latency. Thus, these approaches are not suitable for battery-powered edge devices with limited computing and memory resources. In this paper, we propose the Tiny-Deep Ensemble approach, a low-cost approach for uncertainty estimation on edge devices. In our approach, only normalization layers are ensembled $M$ times, with all ensemble members sharing common weights and biases, leading to a significant decrease in storage requirements and latency. Moreover, our approach requires only one forward pass in a hardware architecture that allows batch processing for inference and uncertainty estimation. Furthermore, it has approximately the same memory overhead compared to a single model. Therefore, latency and memory overhead are reduced by a factor of up to $sim Mtimes$. Nevertheless, our method does not compromise accuracy, with an increase in inference accuracy of up to $sim 1%$ and a reduction in RMSE of $17.17%$ in various benchmark datasets, tasks, and state-of-the-art architectures.
5/10/2024
🌀
Toward Reliable Human Pose Forecasting with Uncertainty
Saeed Saadatnejad, Mehrshad Mirmohammadi, Matin Daghyani, Parham Saremi, Yashar Zoroofchi Benisi, Amirhossein Alimohammadi, Zahra Tehraninasab, Taylor Mordan, Alexandre Alahi
0
0
Recently, there has been an arms race of pose forecasting methods aimed at solving the spatio-temporal task of predicting a sequence of future 3D poses of a person given a sequence of past observed ones. However, the lack of unified benchmarks and limited uncertainty analysis have hindered progress in the field. To address this, we first develop an open-source library for human pose forecasting, including multiple models, supporting several datasets, and employing standardized evaluation metrics, with the aim of promoting research and moving toward a unified and consistent evaluation. Second, we devise two types of uncertainty in the problem to increase performance and convey better trust: 1) we propose a method for modeling aleatoric uncertainty by using uncertainty priors to inject knowledge about the pattern of uncertainty. This focuses the capacity of the model in the direction of more meaningful supervision while reducing the number of learned parameters and improving stability; 2) we introduce a novel approach for quantifying the epistemic uncertainty of any model through clustering and measuring the entropy of its assignments. Our experiments demonstrate up to $25%$ improvements in forecasting at short horizons, with no loss on longer horizons on Human3.6M, AMSS, and 3DPW datasets, and better performance in uncertainty estimation. The code is available online at https://github.com/vita-epfl/UnPOSed.
4/15/2024