Toward Reliable Human Pose Forecasting with Uncertainty
2304.06707
0
0
🌀
Abstract
Recently, there has been an arms race of pose forecasting methods aimed at solving the spatio-temporal task of predicting a sequence of future 3D poses of a person given a sequence of past observed ones. However, the lack of unified benchmarks and limited uncertainty analysis have hindered progress in the field. To address this, we first develop an open-source library for human pose forecasting, including multiple models, supporting several datasets, and employing standardized evaluation metrics, with the aim of promoting research and moving toward a unified and consistent evaluation. Second, we devise two types of uncertainty in the problem to increase performance and convey better trust: 1) we propose a method for modeling aleatoric uncertainty by using uncertainty priors to inject knowledge about the pattern of uncertainty. This focuses the capacity of the model in the direction of more meaningful supervision while reducing the number of learned parameters and improving stability; 2) we introduce a novel approach for quantifying the epistemic uncertainty of any model through clustering and measuring the entropy of its assignments. Our experiments demonstrate up to $25%$ improvements in forecasting at short horizons, with no loss on longer horizons on Human3.6M, AMSS, and 3DPW datasets, and better performance in uncertainty estimation. The code is available online at https://github.com/vita-epfl/UnPOSed.
Create account to get full access
Overview
- This paper addresses the challenge of predicting future 3D poses of a person given a sequence of past observed poses.
- The authors develop an open-source library for human pose forecasting, including multiple models and standardized evaluation metrics, to promote research progress in this area.
- They also propose two types of uncertainty modeling to improve performance and convey better trust in the predictions:
- Aleatoric uncertainty modeling to focus the model's capacity on more meaningful supervision.
- Epistemic uncertainty quantification to measure the model's confidence in its predictions.
Plain English Explanation
The paper focuses on the task of human pose forecasting, which involves predicting the future 3D positions of a person's body parts based on their past movements. This is an important problem in fields like motion capture and human-robot interaction.
The authors first create an open-source library to help researchers work on this problem. The library includes various pose forecasting models and standardized evaluation metrics, making it easier to compare different approaches.
Next, the authors tackle two types of uncertainty in the pose forecasting task. Aleatoric uncertainty refers to the inherent randomness or unpredictability in the data, while epistemic uncertainty reflects the model's lack of knowledge or confidence in its predictions. By modeling these uncertainties, the authors can improve the model's performance and provide better information about how reliable the predictions are.
The experiments show that the authors' approach can improve short-term pose forecasting by up to 25% compared to previous methods, while maintaining performance on longer-term predictions. This is a significant step forward in the field of 3D human pose estimation.
Technical Explanation
The paper proposes two key innovations to address the challenge of human pose forecasting:
-
Unified Benchmarking Library: The authors develop an open-source library for human pose forecasting that includes multiple models, supports several benchmark datasets, and employs standardized evaluation metrics. This aims to promote research progress and move towards a more consistent and unified evaluation of pose forecasting methods.
-
Uncertainty Modeling: The authors devise two types of uncertainty modeling to improve performance and convey better trust in the predictions:
- Aleatoric Uncertainty: They propose a method for modeling aleatoric uncertainty by using uncertainty priors to inject knowledge about the pattern of uncertainty into the model. This focuses the model's capacity on more meaningful supervision, reduces the number of learned parameters, and improves stability.
- Epistemic Uncertainty: The authors introduce a novel approach for quantifying the epistemic uncertainty of any pose forecasting model through clustering and measuring the entropy of its assignments. This provides a way to estimate the model's confidence in its predictions.
The experiments are conducted on three popular human pose datasets: Human3.6M, AMSS, and 3DPW. The results demonstrate up to 25% improvements in short-term pose forecasting, with no loss in performance on longer horizons, as well as better uncertainty estimation compared to previous methods.
Critical Analysis
The paper makes significant contributions to the field of human pose forecasting, but there are a few potential limitations and areas for further research:
-
Dataset Diversity: While the authors evaluate their approach on multiple datasets, these datasets may not fully capture the diversity of human poses and movements encountered in real-world scenarios. Expanding the evaluation to more diverse datasets could help further validate the generalizability of the proposed methods.
-
Real-time Deployment: The paper focuses on improving the accuracy and uncertainty estimation of pose forecasting models, but it does not explicitly address the computational efficiency or real-time performance of the models. For practical applications, such as in robotics or augmented reality, the ability to run the models in real-time is an important consideration.
-
Incorporating External Factors: The current approach relies solely on the past observed poses to predict future poses. Incorporating additional context, such as scene information or interaction with other agents, could further improve the accuracy and robustness of the pose forecasting models.
-
Interpretability: While the authors introduce methods for quantifying uncertainty, the interpretability of the pose forecasting models could be further explored. Providing more insights into the model's decision-making process could help users better understand and trust the predictions.
Overall, the paper presents a valuable contribution to the field of human pose forecasting, with the potential for significant impact in applications such as motion capture, robotics, and augmented reality.
Conclusion
This paper addresses the challenge of predicting future 3D poses of a person given a sequence of past observed poses. The authors develop an open-source library for human pose forecasting, including multiple models and standardized evaluation metrics, to promote research progress in this area. They also propose two types of uncertainty modeling to improve performance and convey better trust in the predictions: aleatoric uncertainty modeling and epistemic uncertainty quantification.
The authors' approach demonstrates up to 25% improvements in short-term pose forecasting, with no loss in performance on longer horizons, and better uncertainty estimation compared to previous methods. This work represents a significant step forward in the field of 3D human pose estimation and has the potential to drive advancements in a wide range of applications that rely on accurate and reliable human motion prediction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
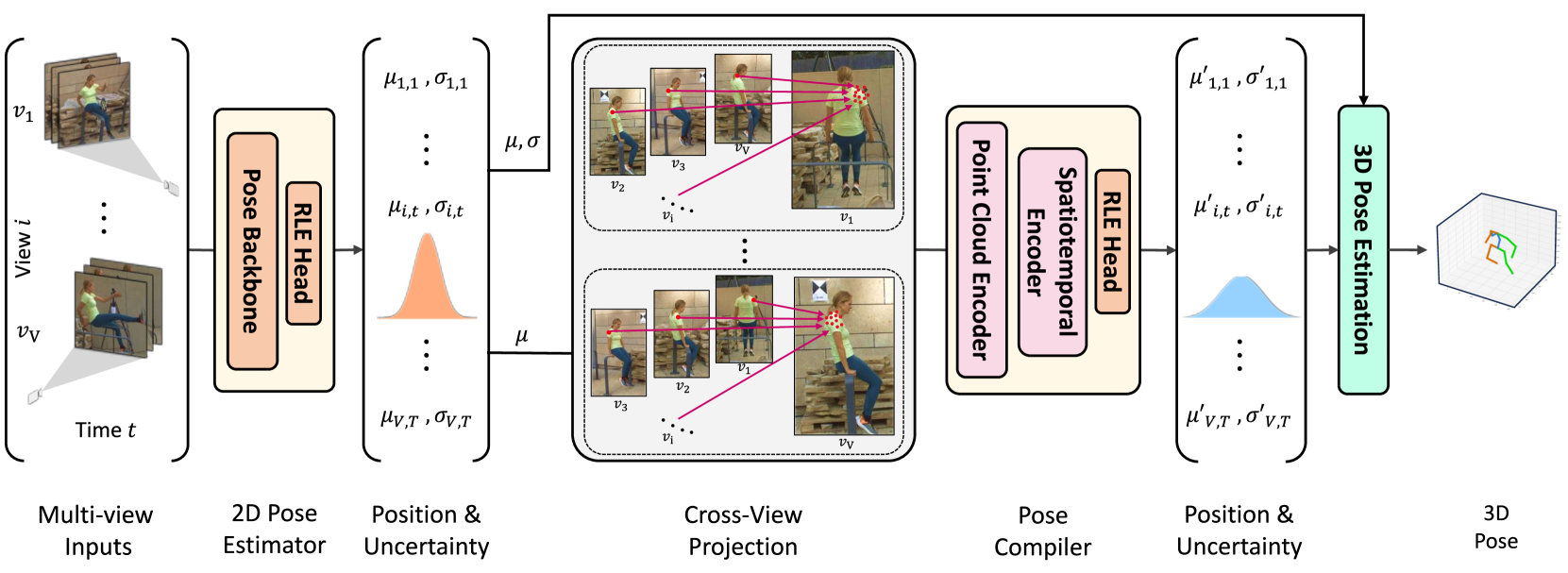
UPose3D: Uncertainty-Aware 3D Human Pose Estimation with Cross-View and Temporal Cues
Vandad Davoodnia, Saeed Ghorbani, Marc-Andr'e Carbonneau, Alexandre Messier, Ali Etemad
0
0
We introduce UPose3D, a novel approach for multi-view 3D human pose estimation, addressing challenges in accuracy and scalability. Our method advances existing pose estimation frameworks by improving robustness and flexibility without requiring direct 3D annotations. At the core of our method, a pose compiler module refines predictions from a 2D keypoints estimator that operates on a single image by leveraging temporal and cross-view information. Our novel cross-view fusion strategy is scalable to any number of cameras, while our synthetic data generation strategy ensures generalization across diverse actors, scenes, and viewpoints. Finally, UPose3D leverages the prediction uncertainty of both the 2D keypoint estimator and the pose compiler module. This provides robustness to outliers and noisy data, resulting in state-of-the-art performance in out-of-distribution settings. In addition, for in-distribution settings, UPose3D yields a performance rivaling methods that rely on 3D annotated data, while being the state-of-the-art among methods relying only on 2D supervision.
5/16/2024
🤿
FutureHuman3D: Forecasting Complex Long-Term 3D Human Behavior from Video Observations
Christian Diller, Thomas Funkhouser, Angela Dai
0
0
We present a generative approach to forecast long-term future human behavior in 3D, requiring only weak supervision from readily available 2D human action data. This is a fundamental task enabling many downstream applications. The required ground-truth data is hard to capture in 3D (mocap suits, expensive setups) but easy to acquire in 2D (simple RGB cameras). Thus, we design our method to only require 2D RGB data at inference time while being able to generate 3D human motion sequences. We use a differentiable 2D projection scheme in an autoregressive manner for weak supervision, and an adversarial loss for 3D regularization. Our method predicts long and complex human behavior sequences (e.g., cooking, assembly) consisting of multiple sub-actions. We tackle this in a semantically hierarchical manner, jointly predicting high-level coarse action labels together with their low-level fine-grained realizations as characteristic 3D human poses. We observe that these two action representations are coupled in nature, and joint prediction benefits both action and pose forecasting. Our experiments demonstrate the complementary nature of joint action and 3D pose prediction: our joint approach outperforms each task treated individually, enables robust longer-term sequence prediction, and improves over alternative approaches to forecast actions and characteristic 3D poses.
5/20/2024
🔮
Multimodal Sense-Informed Prediction of 3D Human Motions
Zhenyu Lou, Qiongjie Cui, Haofan Wang, Xu Tang, Hong Zhou
0
0
Predicting future human pose is a fundamental application for machine intelligence, which drives robots to plan their behavior and paths ahead of time to seamlessly accomplish human-robot collaboration in real-world 3D scenarios. Despite encouraging results, existing approaches rarely consider the effects of the external scene on the motion sequence, leading to pronounced artifacts and physical implausibilities in the predictions. To address this limitation, this work introduces a novel multi-modal sense-informed motion prediction approach, which conditions high-fidelity generation on two modal information: external 3D scene, and internal human gaze, and is able to recognize their salience for future human activity. Furthermore, the gaze information is regarded as the human intention, and combined with both motion and scene features, we construct a ternary intention-aware attention to supervise the generation to match where the human wants to reach. Meanwhile, we introduce semantic coherence-aware attention to explicitly distinguish the salient point clouds and the underlying ones, to ensure a reasonable interaction of the generated sequence with the 3D scene. On two real-world benchmarks, the proposed method achieves state-of-the-art performance both in 3D human pose and trajectory prediction.
5/7/2024
🏋️
Probablistic Restoration with Adaptive Noise Sampling for 3D Human Pose Estimation
Xianzhou Zeng, Hao Qin, Ming Kong, Luyuan Chen, Qiang Zhu
0
0
The accuracy and robustness of 3D human pose estimation (HPE) are limited by 2D pose detection errors and 2D to 3D ill-posed challenges, which have drawn great attention to Multi-Hypothesis HPE research. Most existing MH-HPE methods are based on generative models, which are computationally expensive and difficult to train. In this study, we propose a Probabilistic Restoration 3D Human Pose Estimation framework (PRPose) that can be integrated with any lightweight single-hypothesis model. Specifically, PRPose employs a weakly supervised approach to fit the hidden probability distribution of the 2D-to-3D lifting process in the Single-Hypothesis HPE model and then reverse-map the distribution to the 2D pose input through an adaptive noise sampling strategy to generate reasonable multi-hypothesis samples effectively. Extensive experiments on 3D HPE benchmarks (Human3.6M and MPI-INF-3DHP) highlight the effectiveness and efficiency of PRPose. Code is available at: https://github.com/xzhouzeng/PRPose.
5/6/2024