UncertaintyTrack: Exploiting Detection and Localization Uncertainty in Multi-Object Tracking
2402.12303
0
0
🔎
Abstract
Multi-object tracking (MOT) methods have seen a significant boost in performance recently, due to strong interest from the research community and steadily improving object detection methods. The majority of tracking methods follow the tracking-by-detection (TBD) paradigm, blindly trust the incoming detections with no sense of their associated localization uncertainty. This lack of uncertainty awareness poses a problem in safety-critical tasks such as autonomous driving where passengers could be put at risk due to erroneous detections that have propagated to downstream tasks, including MOT. While there are existing works in probabilistic object detection that predict the localization uncertainty around the boxes, no work in 2D MOT for autonomous driving has studied whether these estimates are meaningful enough to be leveraged effectively in object tracking. We introduce UncertaintyTrack, a collection of extensions that can be applied to multiple TBD trackers to account for localization uncertainty estimates from probabilistic object detectors. Experiments on the Berkeley Deep Drive MOT dataset show that the combination of our method and informative uncertainty estimates reduces the number of ID switches by around 19% and improves mMOTA by 2-3%. The source code is available at https://github.com/TRAILab/UncertaintyTrack
Create account to get full access
Overview
- MOT (multi-object tracking) methods have seen significant performance improvements recently due to advancements in object detection and research interest.
- Most MOT methods follow the tracking-by-detection (TBD) paradigm, which blindly trusts the incoming object detections without considering their localization uncertainty.
- This lack of uncertainty awareness can be problematic in safety-critical applications like autonomous driving, where erroneous detections can propagate and put passengers at risk.
- Existing probabilistic object detection methods can provide localization uncertainty estimates, but no prior work has studied how to effectively leverage these in 2D MOT for autonomous driving.
Plain English Explanation
UncertaintyTrack is a new approach that aims to address the issue of ignoring localization uncertainty in multi-object tracking (MOT) systems, especially for applications like autonomous driving.
Traditional MOT methods rely on object detections from a separate system, treating these detections as completely accurate. However, object detectors can sometimes make mistakes in locating the objects, and these errors can then propagate through the tracking process, leading to incorrect results.
The key insight behind UncertaintyTrack is to leverage the additional information provided by probabilistic object detectors - these detectors not only give the location of an object, but also provide an estimate of how uncertain they are about that location. By taking this uncertainty into account, the tracking system can make better decisions and avoid some of the common errors that occur when blindly trusting the detector's output.
The authors show that incorporating these uncertainty estimates into several popular tracking methods can lead to a reduction in ID switches (where the tracker loses track of an object and starts following a different one) by around 19%, as well as a 2-3% improvement in a common MOT evaluation metric called mMOTA.
This is an important step forward, as accurate multi-object tracking is crucial for safety-critical applications like self-driving cars and robotics. By being more aware of the limitations of the underlying object detectors, tracking systems can make more reliable decisions and provide better information to the rest of the autonomous system.
Technical Explanation
The paper introduces UncertaintyTrack, a collection of extensions that can be applied to multiple tracking-by-detection (TBD) MOT methods to account for localization uncertainty estimates from probabilistic object detectors.
The key components of UncertaintyTrack are:
-
Uncertainty-Aware Association: Instead of solely relying on the object's location, the association between detections and tracked objects also considers the localization uncertainty provided by the detector. This helps the tracker make more informed decisions about which detections belong to which tracks.
-
Uncertainty-Weighted Kalman Filtering: The Kalman filter, a common component of TBD trackers, is modified to weigh the contribution of each detection based on its localization uncertainty. This allows the tracker to put more emphasis on detections with lower uncertainty when updating the object's state.
-
Uncertainty-Based Occlusion Handling: The tracker uses the localization uncertainty to better detect and handle occlusions, where an object is temporarily blocked from the detector's view. By considering uncertainty, the tracker can more reliably determine when an object has been occluded and when it reappears.
The authors evaluate UncertaintyTrack on the Berkeley Deep Drive MOT dataset, a benchmark for multi-object tracking in autonomous driving scenarios. They show that the combination of their method and informative uncertainty estimates from the object detector reduces the number of ID switches by around 19% and improves the mMOTA metric by 2-3% compared to the baseline TBD trackers.
Critical Analysis
The paper makes a compelling case for the importance of considering localization uncertainty in multi-object tracking, especially for safety-critical applications like autonomous driving. By incorporating this additional information from the object detector, the UncertaintyTrack approach is able to achieve meaningful improvements in tracking performance.
However, the paper does not provide a detailed analysis of the limitations of the proposed method or areas for further research. For example, it would be interesting to understand how UncertaintyTrack performs in more challenging scenarios, such as when the object detector's uncertainty estimates are inaccurate or biased.
Additionally, the paper focuses solely on 2D MOT, while many real-world autonomous driving systems also rely on 3D information from sensors like LiDAR. Exploring how to incorporate uncertainty estimates from 3D object detectors could be a valuable area for future work.
Overall, the UncertaintyTrack approach represents a promising step towards more robust and reliable multi-object tracking for safety-critical applications. However, further research is needed to fully understand the limitations and potential avenues for improvement.
Conclusion
The UncertaintyTrack paper introduces a novel approach to multi-object tracking that addresses a crucial issue - the lack of consideration for localization uncertainty in traditional tracking-by-detection methods. By leveraging the uncertainty estimates provided by probabilistic object detectors, the proposed extensions to TBD trackers can significantly improve tracking performance, as demonstrated on the Berkeley Deep Drive MOT dataset.
This work highlights the importance of designing tracking systems that are not only accurate but also aware of the limitations of their underlying components. As autonomous systems become more prevalent in safety-critical domains, incorporating uncertainty awareness will be crucial to ensure reliable and trustworthy operation. The UncertaintyTrack method serves as an important step in this direction, and the insights from this research can inspire further advancements in robust multi-object tracking for a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

UA-Track: Uncertainty-Aware End-to-End 3D Multi-Object Tracking
Lijun Zhou, Tao Tang, Pengkun Hao, Zihang He, Kalok Ho, Shuo Gu, Wenbo Hou, Zhihui Hao, Haiyang Sun, Kun Zhan, Peng Jia, Xianpeng Lang, Xiaodan Liang
0
0
3D multiple object tracking (MOT) plays a crucial role in autonomous driving perception. Recent end-to-end query-based trackers simultaneously detect and track objects, which have shown promising potential for the 3D MOT task. However, existing methods overlook the uncertainty issue, which refers to the lack of precise confidence about the state and location of tracked objects. Uncertainty arises owing to various factors during motion observation by cameras, especially occlusions and the small size of target objects, resulting in an inaccurate estimation of the object's position, label, and identity. To this end, we propose an Uncertainty-Aware 3D MOT framework, UA-Track, which tackles the uncertainty problem from multiple aspects. Specifically, we first introduce an Uncertainty-aware Probabilistic Decoder to capture the uncertainty in object prediction with probabilistic attention. Secondly, we propose an Uncertainty-guided Query Denoising strategy to further enhance the training process. We also utilize Uncertainty-reduced Query Initialization, which leverages predicted 2D object location and depth information to reduce query uncertainty. As a result, our UA-Track achieves state-of-the-art performance on the nuScenes benchmark, i.e., 66.3% AMOTA on the test split, surpassing the previous best end-to-end solution by a significant margin of 8.9% AMOTA.
6/5/2024
🔎
Uncertainty-Aware AB3DMOT by Variational 3D Object Detection
Illia Oleksiienko, Alexandros Iosifidis
0
0
Autonomous driving needs to rely on high-quality 3D object detection to ensure safe navigation in the world. Uncertainty estimation is an effective tool to provide statistically accurate predictions, while the associated detection uncertainty can be used to implement a more safe navigation protocol or include the user in the loop. In this paper, we propose a Variational Neural Network-based TANet 3D object detector to generate 3D object detections with uncertainty and introduce these detections to an uncertainty-aware AB3DMOT tracker. This is done by applying a linear transformation to the estimated uncertainty matrix, which is subsequently used as a measurement noise for the adopted Kalman filter. We implement two ways to estimate output uncertainty, i.e., internally, by computing the variance of the CNN outputs and then propagating the uncertainty through the post-processing, and externally, by associating the final predictions of different samples and computing the covariance of each predicted box. In experiments, we show that the external uncertainty estimation leads to better results, outperforming both internal uncertainty estimation and classical tracking approaches. Furthermore, we propose a method to initialize the Variational 3D object detector with a pretrained TANet model, which leads to the best performing models.
6/19/2024
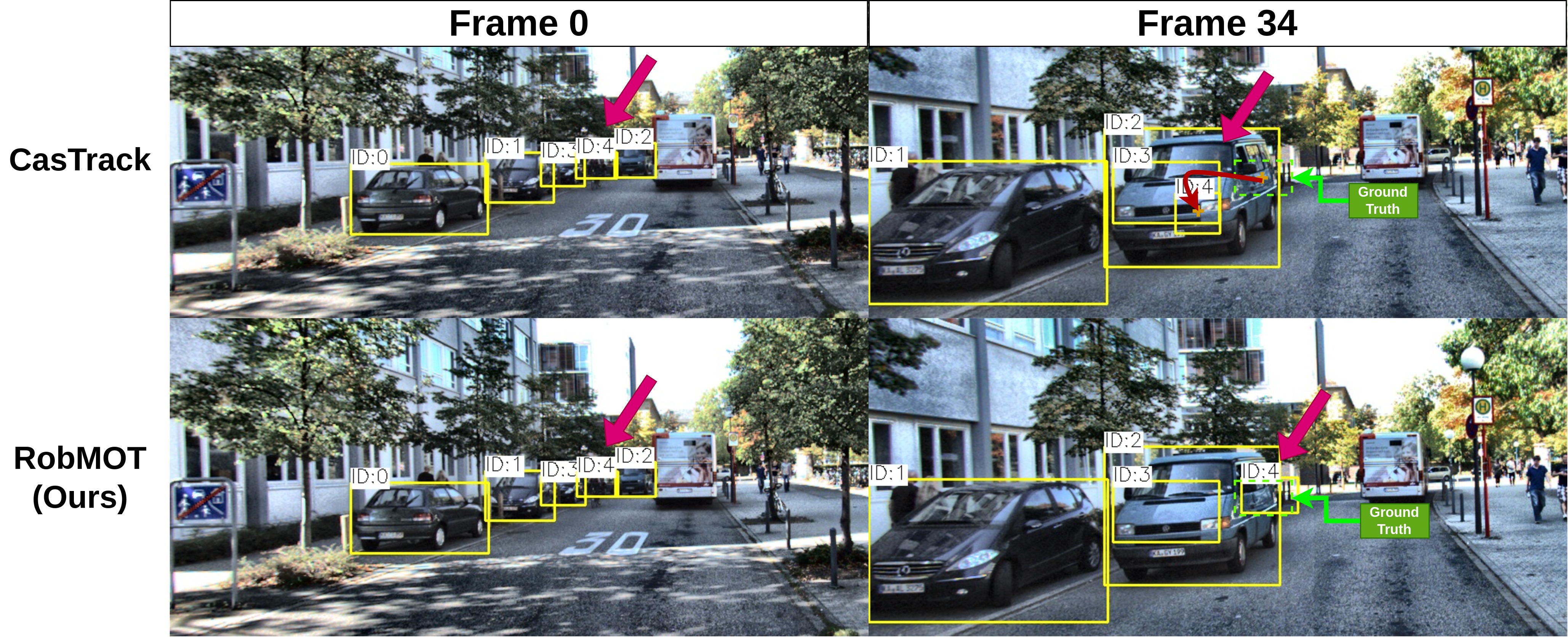
RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
Mohamed Nagy, Naoufel Werghi, Bilal Hassan, Jorge Dias, Majid Khonji
0
0
This work addresses limitations in recent 3D tracking-by-detection methods, focusing on identifying legitimate trajectories and addressing state estimation drift in Kalman filters. Current methods rely heavily on threshold-based filtering of false positive detections using detection scores to prevent ghost trajectories. However, this approach is inadequate for distant and partially occluded objects, where detection scores tend to drop, potentially leading to false positives exceeding the threshold. Additionally, the literature generally treats detections as precise localizations of objects. Our research reveals that noise in detections impacts localization information, causing trajectory drift for occluded objects and hindering recovery. To this end, we propose a novel online track validity mechanism that temporally distinguishes between legitimate and ghost tracks, along with a multi-stage observational gating process for incoming observations. This mechanism significantly improves tracking performance, with a $6.28%$ in HOTA and a $17.87%$ increase in MOTA. We also introduce a refinement to the Kalman filter that enhances noise mitigation in trajectory drift, leading to more robust state estimation for occluded objects. Our framework, RobMOT, outperforms state-of-the-art methods, including deep learning approaches, across various detectors, achieving up to a $4%$ margin in HOTA and $6%$ in MOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and tracking distant objects, with up to a 59% improvement in processing latency.
6/21/2024

Track Initialization and Re-Identification for~3D Multi-View Multi-Object Tracking
Linh Van Ma, Tran Thien Dat Nguyen, Ba-Ngu Vo, Hyunsung Jang, Moongu Jeon
0
0
We propose a 3D multi-object tracking (MOT) solution using only 2D detections from monocular cameras, which automatically initiates/terminates tracks as well as resolves track appearance-reappearance and occlusions. Moreover, this approach does not require detector retraining when cameras are reconfigured but only the camera matrices of reconfigured cameras need to be updated. Our approach is based on a Bayesian multi-object formulation that integrates track initiation/termination, re-identification, occlusion handling, and data association into a single Bayes filtering recursion. However, the exact filter that utilizes all these functionalities is numerically intractable due to the exponentially growing number of terms in the (multi-object) filtering density, while existing approximations trade-off some of these functionalities for speed. To this end, we develop a more efficient approximation suitable for online MOT by incorporating object features and kinematics into the measurement model, which improves data association and subsequently reduces the number of terms. Specifically, we exploit the 2D detections and extracted features from multiple cameras to provide a better approximation of the multi-object filtering density to realize the track initiation/termination and re-identification functionalities. Further, incorporating a tractable geometric occlusion model based on 2D projections of 3D objects on the camera planes realizes the occlusion handling functionality of the filter. Evaluation of the proposed solution on challenging datasets demonstrates significant improvements and robustness when camera configurations change on-the-fly, compared to existing multi-view MOT solutions. The source code is publicly available at https://github.com/linh-gist/mv-glmb-ab.
5/30/2024