Cost-Sensitive Uncertainty-Based Failure Recognition for Object Detection

0
👁️
Sign in to get full access
Overview
- Real-world object detectors often fail due to factors like weather and noisy input
- A process to mitigate false detections is crucial for safety and accuracy
- Previous work shows imperfect correlation between uncertainty and detection errors, hindering ideal thresholding
- This paper proposes a cost-sensitive framework to optimize object detection for user-defined budgets on missing and false detections
Plain English Explanation
Object detection systems, such as those used in self-driving cars, can sometimes fail to identify objects correctly. This can happen due to challenging conditions like bad weather or noisy sensor data. Having a way to identify these failures is important for both safety and accuracy.
Previous research has looked at using uncertainty quantification to flag potential detection errors. However, the relationship between uncertainty and actual errors hasn't been perfect. This makes it hard to set the right thresholds to balance missing detections and false alarms.
This paper proposes a new approach that takes a more targeted, cost-sensitive view. It allows users to set budgets for the two main types of errors: missing detections and false alarms. The system then automatically finds the optimal thresholds to maximize the detection of failures, while staying within those user-specified budgets.
The key innovations are:
- Deriving the minimum thresholding requirements to prevent performance degradation
- Defining metrics to assess how well uncertainty can be used to recognize detection failures
- Automating and optimizing the thresholding process to maximize failure detection within the given budgets
The authors evaluate this approach on self-driving car datasets and show it can significantly boost the ability to recognize when the object detector is making mistakes, especially in challenging scenarios. This could lead to safer and more reliable autonomous systems.
Technical Explanation
The paper proposes a cost-sensitive framework for object detection that allows users to specify budgets for two types of errors: missing detections and false alarms. The goal is to optimize the thresholds used to flag potential detection failures, in order to maximize the rate of failure recognition while staying within the user-defined budgets.
The key technical contributions are:
-
Thresholding Requirements Analysis: The authors derive the minimum thresholding requirements to prevent overall performance degradation. This provides guidelines for setting appropriate thresholds.
-
Uncertainty Metrics: New metrics are defined to assess the applicability of different types of uncertainty (e.g. aleatoric uncertainty, softmax entropy) for recognizing detection failures.
-
Optimization Framework: An automated optimization process is proposed to find the thresholds that maximize the failure recognition rate while satisfying the user-specified budgets on missing and false detections.
The framework is evaluated on three autonomous driving datasets, demonstrating significant improvements in failure recognition compared to conventional approaches. Leveraging localization aleatoric uncertainty and softmax-based entropy, the method boosts the failure recognition rate by 36-60%.
Critical Analysis
The paper provides a well-designed and thorough framework for improving the robustness of object detectors in real-world applications. The cost-sensitive approach and automated thresholding optimization are clever ways to address the challenges of uncertainty-based failure detection.
One potential limitation is the reliance on specific types of uncertainty measures (aleatoric uncertainty, softmax entropy). While the paper shows these work well, there may be other uncertainty quantification techniques that could further improve performance. Exploring a broader set of uncertainty metrics could be an avenue for future research.
Additionally, the evaluation is focused on autonomous driving datasets. Applying the framework to other domains, such as 3D object detection for robots, could help validate its broader applicability.
Overall, this is a thoughtful and well-executed piece of research that makes a meaningful contribution to improving the reliability of real-world object detection systems.
Conclusion
This paper presents a novel cost-sensitive framework for object detection that aims to optimize the tradeoff between missing detections and false alarms. By allowing users to specify budgets for these two error types, the system can automatically find the best thresholds to maximize the detection of potential failures.
The key innovations include analyzing minimum thresholding requirements, defining metrics to assess uncertainty-based failure recognition, and automating the optimization process. Evaluations on autonomous driving datasets show significant improvements in failure detection rates compared to conventional approaches.
This work highlights the importance of addressing robustness and reliability in real-world object detection, which is crucial for safety-critical applications like self-driving cars. The cost-sensitive, user-friendly design of the framework also makes it a practical solution for deploying more trustworthy object detection systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👁️
0
Cost-Sensitive Uncertainty-Based Failure Recognition for Object Detection
Moussa Kassem Sbeyti, Michelle Karg, Christian Wirth, Nadja Klein, Sahin Albayrak
Object detectors in real-world applications often fail to detect objects due to varying factors such as weather conditions and noisy input. Therefore, a process that mitigates false detections is crucial for both safety and accuracy. While uncertainty-based thresholding shows promise, previous works demonstrate an imperfect correlation between uncertainty and detection errors. This hinders ideal thresholding, prompting us to further investigate the correlation and associated cost with different types of uncertainty. We therefore propose a cost-sensitive framework for object detection tailored to user-defined budgets on the two types of errors, missing and false detections. We derive minimum thresholding requirements to prevent performance degradation and define metrics to assess the applicability of uncertainty for failure recognition. Furthermore, we automate and optimize the thresholding process to maximize the failure recognition rate w.r.t. the specified budget. Evaluation on three autonomous driving datasets demonstrates that our approach significantly enhances safety, particularly in challenging scenarios. Leveraging localization aleatoric uncertainty and softmax-based entropy only, our method boosts the failure recognition rate by 36-60% compared to conventional approaches. Code is available at https://mos-ks.github.io/publications.
Read more4/29/2024
🔎
0
Enhancing 3D Object Detection by Using Neural Network with Self-adaptive Thresholding
Houze Liu, Chongqing Wang, Xiaoan Zhan, Haotian Zheng, Chang Che
Robust 3D object detection remains a pivotal concern in the domain of autonomous field robotics. Despite notable enhancements in detection accuracy across standard datasets, real-world urban environments, characterized by their unstructured and dynamic nature, frequently precipitate an elevated incidence of false positives, thereby undermining the reliability of existing detection paradigms. In this context, our study introduces an advanced post-processing algorithm that modulates detection thresholds dynamically relative to the distance from the ego object. Traditional perception systems typically utilize a uniform threshold, which often leads to decreased efficacy in detecting distant objects. In contrast, our proposed methodology employs a Neural Network with a self-adaptive thresholding mechanism that significantly attenuates false negatives while concurrently diminishing false positives, particularly in complex urban settings. Empirical results substantiate that our algorithm not only augments the performance of 3D object detection models in diverse urban and adverse weather scenarios but also establishes a new benchmark for adaptive thresholding techniques in field robotics.
Read more5/14/2024
0
Toward Robust LiDAR based 3D Object Detection via Density-Aware Adaptive Thresholding
Eunho Lee, Minwoo Jung, Ayoung Kim
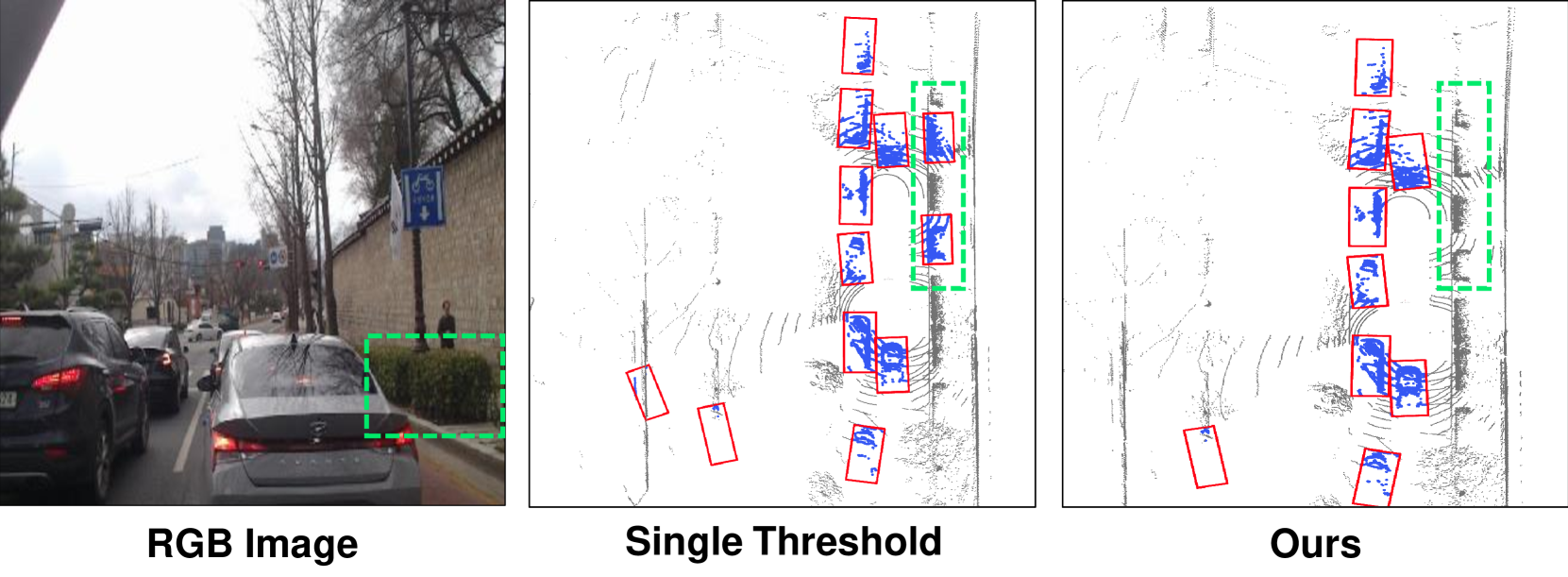
Robust 3D object detection is a core challenge for autonomous mobile systems in field robotics. To tackle this issue, many researchers have demonstrated improvements in 3D object detection performance in datasets. However, real-world urban scenarios with unstructured and dynamic situations can still lead to numerous false positives, posing a challenge for robust 3D object detection models. This paper presents a post-processing algorithm that dynamically adjusts object detection thresholds based on the distance from the ego-vehicle. 3D object detection models usually perform well in detecting nearby objects but may exhibit suboptimal performance for distant ones. While conventional perception algorithms typically employ a single threshold in post-processing, the proposed algorithm addresses this issue by employing adaptive thresholds based on the distance from the ego-vehicle, minimizing false negatives and reducing false positives in urban scenarios. The results show performance enhancements in 3D object detection models across a range of scenarios, not only in dynamic urban road conditions but also in scenarios involving adverse weather conditions.
Read more4/23/2024
🔎
0
Automated Detection of Label Errors in Semantic Segmentation Datasets via Deep Learning and Uncertainty Quantification
Matthias Rottmann, Marco Reese
In this work, we for the first time present a method for detecting label errors in image datasets with semantic segmentation, i.e., pixel-wise class labels. Annotation acquisition for semantic segmentation datasets is time-consuming and requires plenty of human labor. In particular, review processes are time consuming and label errors can easily be overlooked by humans. The consequences are biased benchmarks and in extreme cases also performance degradation of deep neural networks (DNNs) trained on such datasets. DNNs for semantic segmentation yield pixel-wise predictions, which makes detection of label errors via uncertainty quantification a complex task. Uncertainty is particularly pronounced at the transitions between connected components of the prediction. By lifting the consideration of uncertainty to the level of predicted components, we enable the usage of DNNs together with component-level uncertainty quantification for the detection of label errors. We present a principled approach to benchmarking the task of label error detection by dropping labels from the Cityscapes dataset as well from a dataset extracted from the CARLA driving simulator, where in the latter case we have the labels under control. Our experiments show that our approach is able to detect the vast majority of label errors while controlling the number of false label error detections. Furthermore, we apply our method to semantic segmentation datasets frequently used by the computer vision community and present a collection of label errors along with sample statistics.
Read more8/27/2024