Unfolding the Literature: A Review of Robotic Cloth Manipulation

0
Sign in to get full access
Overview
- This paper provides a comprehensive review of the current state of research in robotic cloth manipulation, covering fundamental concepts, key challenges, and recent advancements.
- The review covers a range of topics, including learning keypoints for robotic cloth manipulation, unified frameworks for category-level garment manipulation, and soft contact simulation for manipulation learning of deformable objects.
- The paper aims to unify the existing literature, identify key research directions, and provide a roadmap for future developments in this rapidly evolving field.
Plain English Explanation
This research paper is a comprehensive review of the current state of robotic cloth manipulation. It covers the fundamental concepts, key challenges, and recent advancements in this field.
The review discusses various topics, such as using machine learning to identify key points on a piece of cloth that a robot can use to manipulate it, as well as frameworks that allow robots to manipulate different types of garments in a unified way. It also covers how researchers are using simulations of soft contact between robots and deformable objects, like cloth, to help robots learn how to manipulate them.
The goal of this paper is to bring together all the existing research in this area, identify the most important problems that still need to be solved, and provide a roadmap for future developments in robotic cloth manipulation. This can help researchers and engineers working on this technology to better understand the current state of the field and where it might be headed next.
Technical Explanation
The paper begins by introducing the field of robotic cloth manipulation, highlighting its importance in various applications such as laundry folding, garment sorting, and surgery. It then delves into the fundamental concepts underlying cloth manipulation, including the unique challenges posed by the highly deformable and complex nature of cloth.
The review covers several key research directions in this field. One area discussed is learning keypoints for robotic cloth manipulation using synthetic data, where researchers have developed techniques to identify salient points on a piece of cloth that a robot can use to grasp and manipulate it. Another topic explored is unified frameworks for category-level garment manipulation, which aim to create flexible systems that can handle a wide range of garment types.
The paper also examines soft contact simulation for manipulation learning of deformable objects, where researchers are using advanced simulation environments to help robots learn how to manipulate soft, deformable materials like cloth through trial and error.
Throughout the review, the authors highlight key challenges, such as the need for improved perception, planning, and control algorithms to enable more robust and dexterous cloth manipulation. They also discuss promising directions for future research, including the integration of machine learning and physics-based modeling.
Critical Analysis
The paper provides a thorough and well-researched overview of the current state of robotic cloth manipulation, covering a broad range of topics and highlighting the key developments and challenges in the field.
One notable aspect of the review is its emphasis on the importance of simulation-based learning for improving cloth manipulation capabilities. While this approach has shown promise, the authors acknowledge the limitations of current simulation environments in accurately capturing the complex dynamics of real-world cloth interactions. Further advancements in soft contact modeling and simulation may be necessary to bridge the gap between simulated and real-world performance.
Additionally, the paper could have delved deeper into the potential societal and ethical implications of advances in robotic cloth manipulation, such as the impact on jobs in the textile and laundry industries, or the privacy concerns related to the use of this technology in healthcare and other sensitive domains.
Overall, the review serves as a valuable resource for researchers and practitioners in the field of robotic cloth manipulation, providing a comprehensive and insightful summary of the current state of the art and highlighting promising avenues for future exploration.
Conclusion
This literature review provides a thorough examination of the current state of research in robotic cloth manipulation. It covers the fundamental concepts, key challenges, and recent advancements in this rapidly evolving field, including topics such as learning keypoints for robotic cloth manipulation, unified frameworks for category-level garment manipulation, and soft contact simulation for manipulation learning of deformable objects.
By synthesizing the existing literature, the authors have identified critical research directions and provided a roadmap for future developments in robotic cloth manipulation. This comprehensive review serves as a valuable resource for researchers and engineers working to advance the capabilities of robotic systems in handling and manipulating deformable materials like cloth, with potential applications in a wide range of industries, from laundry and garment processing to healthcare and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Unfolding the Literature: A Review of Robotic Cloth Manipulation
Alberta Longhini, Yufei Wang, Irene Garcia-Camacho, David Blanco-Mulero, Marco Moletta, Michael Welle, Guillem Aleny`a, Hang Yin, Zackory Erickson, David Held, J'ulia Borr`as, Danica Kragic
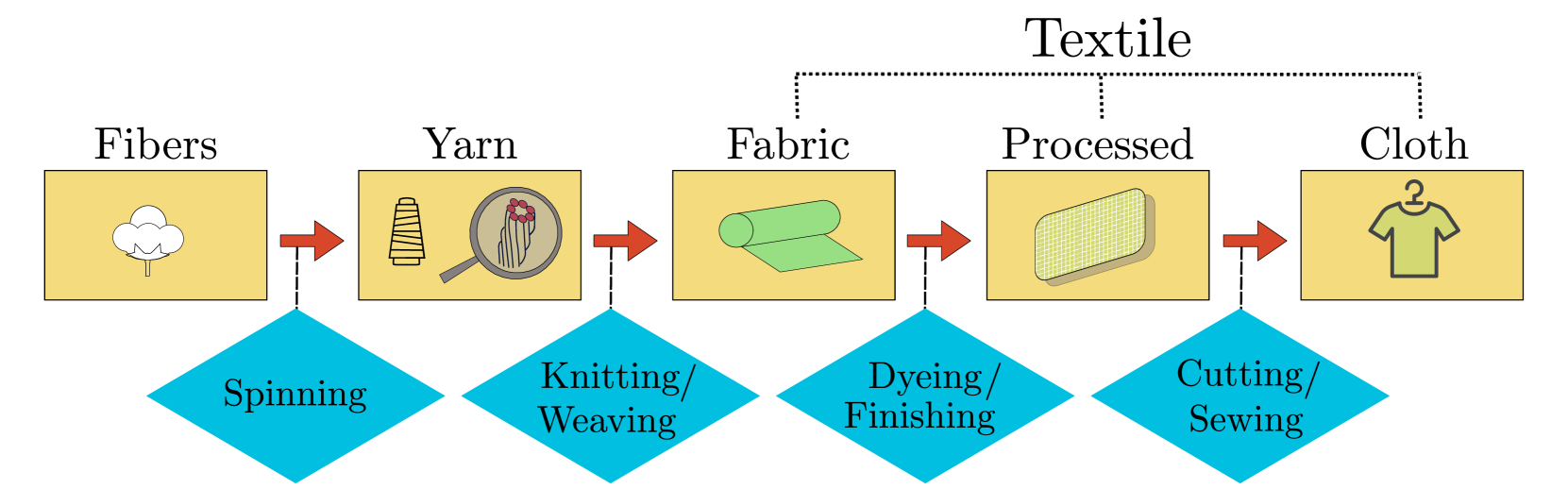
The realm of textiles spans clothing, households, healthcare, sports, and industrial applications. The deformable nature of these objects poses unique challenges that prior work on rigid objects cannot fully address. The increasing interest within the community in textile perception and manipulation has led to new methods that aim to address challenges in modeling, perception, and control, resulting in significant progress. However, this progress is often tailored to one specific textile or a subcategory of these textiles. To understand what restricts these methods and hinders current approaches from generalizing to a broader range of real-world textiles, this review provides an overview of the field, focusing specifically on how and to what extent textile variations are addressed in modeling, perception, benchmarking, and manipulation of textiles. We finally conclude by identifying key open problems and outlining grand challenges that will drive future advancements in the field.
Read more7/17/2024

0
GPT-Fabric: Folding and Smoothing Fabric by Leveraging Pre-Trained Foundation Models
Vedant Raval, Enyu Zhao, Hejia Zhang, Stefanos Nikolaidis, Daniel Seita
Fabric manipulation has applications in folding blankets, handling patient clothing, and protecting items with covers. It is challenging for robots to perform fabric manipulation since fabrics have infinite-dimensional configuration spaces, complex dynamics, and may be in folded or crumpled configurations with severe self-occlusions. Prior work on robotic fabric manipulation relies either on heavily engineered setups or learning-based approaches that create and train on robot-fabric interaction data. In this paper, we propose GPT-Fabric for the canonical tasks of fabric folding and smoothing, where GPT directly outputs an action informing a robot where to grasp and pull a fabric. We perform extensive experiments in simulation to test GPT-Fabric against prior state of the art methods for folding and smoothing. We obtain comparable or better performance to most methods even without explicitly training on a fabric-specific dataset (i.e., zero-shot manipulation). Furthermore, we apply GPT-Fabric in physical experiments over 12 folding and 10 smoothing rollouts. Our results suggest that GPT-Fabric is a promising approach for high-precision fabric manipulation tasks.
Read more6/17/2024

0
Learning Keypoints for Robotic Cloth Manipulation using Synthetic Data
Thomas Lips, Victor-Louis De Gusseme, Francis wyffels
Assistive robots should be able to wash, fold or iron clothes. However, due to the variety, deformability and self-occlusions of clothes, creating robot systems for cloth manipulation is challenging. Synthetic data is a promising direction to improve generalization, but the sim-to-real gap limits its effectiveness. To advance the use of synthetic data for cloth manipulation tasks such as robotic folding, we present a synthetic data pipeline to train keypoint detectors for almost-flattened cloth items. To evaluate its performance, we have also collected a real-world dataset. We train detectors for both T-shirts, towels and shorts and obtain an average precision of 64% and an average keypoint distance of 18 pixels. Fine-tuning on real-world data improves performance to 74% mAP and an average distance of only 9 pixels. Furthermore, we describe failure modes of the keypoint detectors and compare different approaches to obtain cloth meshes and materials. We also quantify the remaining sim-to-real gap and argue that further improvements to the fidelity of cloth assets will be required to further reduce this gap. The code, dataset and trained models are available
Read more5/22/2024

0
Assistive Soft Robotic Glove with Ruffles Enhanced Textile Actuators
Cem Suulker, Kaspar Althoefer
Hand-wearable robots, specifically exoskeletons, are designed to aid hands in daily activities, playing a crucial role in post-stroke rehabilitation and assisting the elderly. Our contribution to this field is a textile robotic glove with integrated actuators. These actuators, powered by pneumatic pressure, guide the user's hand to a desired position. Crafted from textile materials, our soft robotic glove prioritizes safety, lightweight construction, and user comfort. Utilizing the ruffles technique, integrated actuators guarantee high performance in blocking force and bending effectiveness. Additionally, we present a participant study confirming the effectiveness of our robotic device.
Read more8/16/2024