Learning Keypoints for Robotic Cloth Manipulation using Synthetic Data

0

Sign in to get full access
Overview
- This paper presents a method for learning keypoints for robotic cloth manipulation using synthetic data.
- The authors generated a large dataset of simulated cloth manipulations and used it to train a neural network to predict key points on the cloth.
- The goal is to enable robots to reliably interact with and manipulate cloth-based objects, which is a challenging task.
Plain English Explanation
The researchers in this study wanted to develop a way for robots to better understand and manipulate pieces of cloth. Interacting with flexible, deformable materials like cloth is a difficult challenge for robots, as they need to be able to identify important locations or "keypoints" on the cloth in order to grasp and move it effectively.
To address this, the researchers created a large dataset of simulated cloth manipulation scenarios using a physics-based simulation engine. They then trained a deep neural network model to analyze these synthetic cloth images and predict the locations of key points on the cloth, such as corners, edges, and folds.
The intuition is that by learning from this diverse set of simulated data, the model will be able to generalize and accurately locate keypoints on real cloth objects, enabling more reliable robotic cloth manipulation. This approach of using synthetic data generation to bridge the sim-to-real gap is an active area of research in robotics and computer vision.
Technical Explanation
The key technical components of this work are:
-
Synthetic Dataset Generation: The authors developed a physics-based simulation engine to generate a diverse dataset of cloth manipulation scenarios. This included simulating various cloth shapes, initial conditions, external forces, and robot interactions. The resulting dataset contained over 100,000 annotated cloth images.
-
Keypoint Prediction Model: The authors trained a convolutional neural network (CNN) to take in the simulated cloth images and predict the 2D coordinates of key points on the cloth, such as corners, edges, and folds. This model was trained end-to-end on the synthetic dataset.
-
Sim-to-Real Transfer: To evaluate the model's performance on real-world data, the authors collected a small dataset of real cloth manipulation videos. They showed that the model trained on synthetic data could generalize to this real-world dataset with reasonable accuracy, demonstrating the potential for training deep learning models on hybrid datasets to achieve robustness.
The authors also integrated their keypoint prediction model into a broader robotic cloth manipulation framework and demonstrated its effectiveness on various cloth folding and garment manipulation tasks.
Critical Analysis
The authors acknowledge several limitations of their work. First, the synthetic dataset, while large, may not fully capture the complexity and variability of real-world cloth. More advanced simulation techniques or data augmentation methods could further improve sim-to-real transfer.
Additionally, the keypoint prediction model was trained and evaluated on a relatively simple set of cloth manipulation tasks. Its performance may degrade on more complex scenarios, such as dealing with occlusions, dynamic interactions, or multi-layered fabrics. Further research is needed to address these challenges.
Finally, the authors did not provide a detailed comparison to alternative approaches for robotic cloth manipulation, such as model-based methods or end-to-end reinforcement learning. A more comprehensive benchmarking against other state-of-the-art techniques would help better situate the contributions of this work.
Conclusion
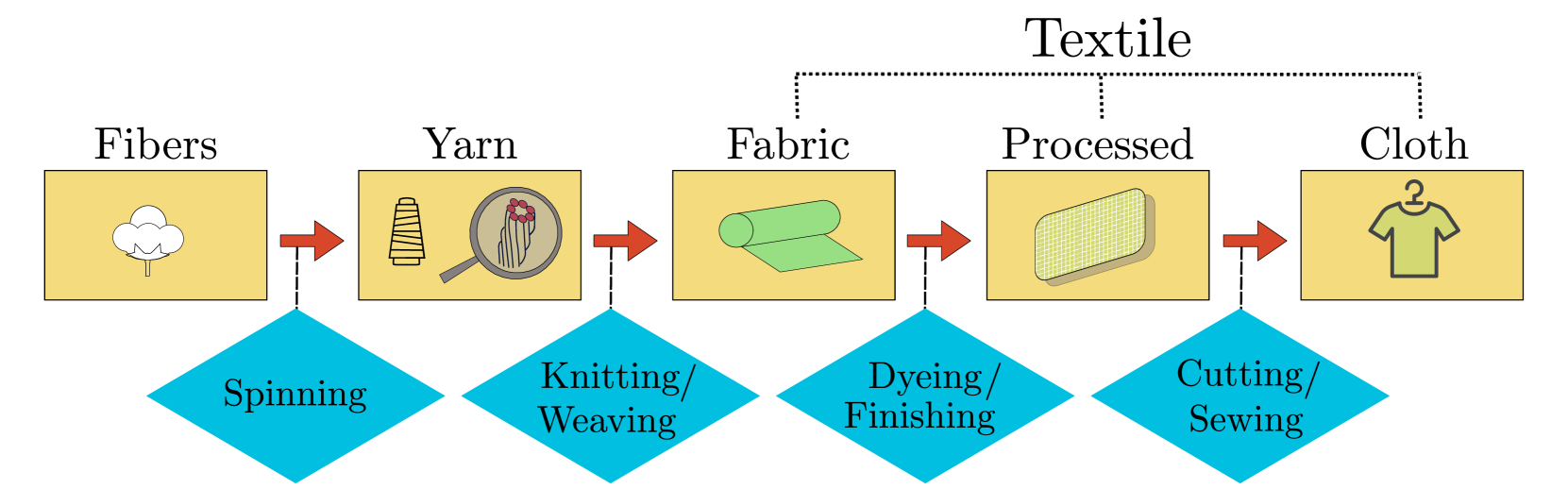
Overall, this paper presents a promising approach for enabling more robust and reliable robotic cloth manipulation by leveraging large-scale synthetic data. The ability to accurately locate key points on cloth can be a crucial building block for a wide range of textile-handling applications, from household chores to industrial garment manufacturing. While the current approach has some limitations, the authors' work demonstrates the potential of data-driven methods to tackle this challenging problem.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Keypoints for Robotic Cloth Manipulation using Synthetic Data
Thomas Lips, Victor-Louis De Gusseme, Francis wyffels
Assistive robots should be able to wash, fold or iron clothes. However, due to the variety, deformability and self-occlusions of clothes, creating robot systems for cloth manipulation is challenging. Synthetic data is a promising direction to improve generalization, but the sim-to-real gap limits its effectiveness. To advance the use of synthetic data for cloth manipulation tasks such as robotic folding, we present a synthetic data pipeline to train keypoint detectors for almost-flattened cloth items. To evaluate its performance, we have also collected a real-world dataset. We train detectors for both T-shirts, towels and shorts and obtain an average precision of 64% and an average keypoint distance of 18 pixels. Fine-tuning on real-world data improves performance to 74% mAP and an average distance of only 9 pixels. Furthermore, we describe failure modes of the keypoint detectors and compare different approaches to obtain cloth meshes and materials. We also quantify the remaining sim-to-real gap and argue that further improvements to the fidelity of cloth assets will be required to further reduce this gap. The code, dataset and trained models are available
Read more5/22/2024

0
General-purpose Clothes Manipulation with Semantic Keypoints
Yuhong Deng, David Hsu
We have seen much recent progress in task-specific clothes manipulation, but generalizable clothes manipulation is still a challenge. Clothes manipulation requires sequential actions, making it challenging to generalize to unseen tasks. Besides, a general clothes state representation method is crucial. In this paper, we adopt language instructions to specify and decompose clothes manipulation tasks, and propose a large language model based hierarchical learning method to enhance generalization. For state representation, we use semantic keypoints to capture the geometry of clothes and outline their manipulation methods. Simulation experiments show that the proposed method outperforms the baseline method in terms of success rate and generalization for clothes manipulation tasks.
Read more8/16/2024

0
Improving Object Detector Training on Synthetic Data by Starting With a Strong Baseline Methodology
Frank A. Ruis, Alma M. Liezenga, Friso G. Heslinga, Luca Ballan, Thijs A. Eker, Richard J. M. den Hollander, Martin C. van Leeuwen, Judith Dijk, Wyke Huizinga
Collecting and annotating real-world data for the development of object detection models is a time-consuming and expensive process. In the military domain in particular, data collection can also be dangerous or infeasible. Training models on synthetic data may provide a solution for cases where access to real-world training data is restricted. However, bridging the reality gap between synthetic and real data remains a challenge. Existing methods usually build on top of baseline Convolutional Neural Network (CNN) models that have been shown to perform well when trained on real data, but have limited ability to perform well when trained on synthetic data. For example, some architectures allow for fine-tuning with the expectation of large quantities of training data and are prone to overfitting on synthetic data. Related work usually ignores various best practices from object detection on real data, e.g. by training on synthetic data from a single environment with relatively little variation. In this paper we propose a methodology for improving the performance of a pre-trained object detector when training on synthetic data. Our approach focuses on extracting the salient information from synthetic data without forgetting useful features learned from pre-training on real images. Based on the state of the art, we incorporate data augmentation methods and a Transformer backbone. Besides reaching relatively strong performance without any specialized synthetic data transfer methods, we show that our methods improve the state of the art on synthetic data trained object detection for the RarePlanes and DGTA-VisDrone datasets, and reach near-perfect performance on an in-house vehicle detection dataset.
Read more5/31/2024
0
Unfolding the Literature: A Review of Robotic Cloth Manipulation
Alberta Longhini, Yufei Wang, Irene Garcia-Camacho, David Blanco-Mulero, Marco Moletta, Michael Welle, Guillem Aleny`a, Hang Yin, Zackory Erickson, David Held, J'ulia Borr`as, Danica Kragic
The realm of textiles spans clothing, households, healthcare, sports, and industrial applications. The deformable nature of these objects poses unique challenges that prior work on rigid objects cannot fully address. The increasing interest within the community in textile perception and manipulation has led to new methods that aim to address challenges in modeling, perception, and control, resulting in significant progress. However, this progress is often tailored to one specific textile or a subcategory of these textiles. To understand what restricts these methods and hinders current approaches from generalizing to a broader range of real-world textiles, this review provides an overview of the field, focusing specifically on how and to what extent textile variations are addressed in modeling, perception, benchmarking, and manipulation of textiles. We finally conclude by identifying key open problems and outlining grand challenges that will drive future advancements in the field.
Read more7/17/2024