A Universal Railway Obstacle Detection System based on Semi-supervised Segmentation And Optical Flow

0

Sign in to get full access
Overview
- This paper presents a universal railway obstacle detection system that uses semi-supervised segmentation and optical flow techniques.
- The system aims to reliably detect various obstacles on railway tracks, including people, animals, and objects, to improve railway safety.
- The researchers leverage both supervised and unsupervised learning approaches to build a robust obstacle detection model.
Plain English Explanation
The paper describes a new system for detecting obstacles on railway tracks, which is an important task for improving railway safety. The system uses a combination of machine learning techniques, including semi-supervised segmentation and optical flow, to identify different types of obstacles, such as people, animals, and objects.
The key idea is to use both labeled and unlabeled data to train the obstacle detection model. This "semi-supervised" approach can help the model learn more effectively, as it can leverage the information in the unlabeled data to improve its performance. The optical flow technique is used to detect the movement of objects, which can be a useful cue for identifying obstacles on the track.
By combining these advanced machine learning techniques, the researchers aim to create a system that can reliably detect a wide range of obstacles, improving the safety of railway operations. This could have important real-world applications, as undetected obstacles on railway tracks can lead to serious accidents.
Technical Explanation
The paper presents a universal railway obstacle detection system that leverages both semi-supervised segmentation and optical flow techniques. The system is designed to accurately detect various types of obstacles, including people, animals, and objects, on railway tracks.
The researchers first use a semi-supervised segmentation approach to identify the different regions in the input images that may contain obstacles. This approach combines both labeled and unlabeled data to train the segmentation model, allowing it to learn more effectively and generalize better to unseen data.
Next, the system employs optical flow analysis to detect the movement of objects within the segmented regions. This information is used to differentiate between stationary objects and moving obstacles, which is a crucial distinction for railway safety applications.
The researchers also incorporate amodal optical flow techniques to handle occlusions and partially visible obstacles, further improving the system's robustness.
The proposed approach is evaluated on a dataset of railway scenes, and the results demonstrate the effectiveness of the combined semi-supervised segmentation and optical flow techniques in accurately detecting a wide range of obstacles.
Critical Analysis
The paper presents a well-designed and comprehensive solution for railway obstacle detection, addressing several key challenges in this domain. The use of semi-supervised learning and optical flow analysis is a novel and promising approach that could have broader applications beyond railway safety.
One potential limitation of the study is the lack of a detailed evaluation of the system's performance in real-world scenarios, where the challenges of varying lighting conditions, weather, and infrastructure may pose additional difficulties. Further testing and validation in more diverse settings would help assess the system's practical viability.
Additionally, the paper does not discuss the computational efficiency of the proposed approach, which is an important consideration for real-time obstacle detection systems. Investigating the trade-offs between detection accuracy and processing speed would be valuable for deploying the system in practical applications.
Finally, the paper could have explored the ethical implications of such a system, particularly regarding the privacy and safety of individuals traveling on the railway network. Addressing these concerns and outlining appropriate safeguards would be crucial for the responsible deployment of this technology.
Conclusion
The paper presents a novel railway obstacle detection system that combines semi-supervised segmentation and optical flow techniques to reliably identify a wide range of obstacles, including people, animals, and objects, on railway tracks. This approach has the potential to significantly improve railway safety and prevent accidents caused by undetected obstacles.
The use of both supervised and unsupervised learning methods, as well as advanced optical flow analysis, demonstrates the researchers' comprehensive understanding of the problem and their technical expertise. While the paper provides a solid foundation for this research, further evaluation and optimization of the system's performance, computational efficiency, and ethical considerations would be valuable for its real-world application and adoption.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Universal Railway Obstacle Detection System based on Semi-supervised Segmentation And Optical Flow
Qiushi Guo
Detecting obstacles in railway scenarios is both crucial and challenging due to the wide range of obstacle categories and varying ambient conditions such as weather and light. Given the impossibility of encompassing all obstacle categories during the training stage, we address this out-of-distribution (OOD) issue with a semi-supervised segmentation approach guided by optical flow clues. We reformulate the task as a binary segmentation problem instead of the traditional object detection approach. To mitigate data shortages, we generate highly realistic synthetic images using Segment Anything (SAM) and YOLO, eliminating the need for manual annotation to produce abundant pixel-level annotations. Additionally, we leverage optical flow as prior knowledge to train the model effectively. Several experiments are conducted, demonstrating the feasibility and effectiveness of our approach.
Read more6/28/2024
0
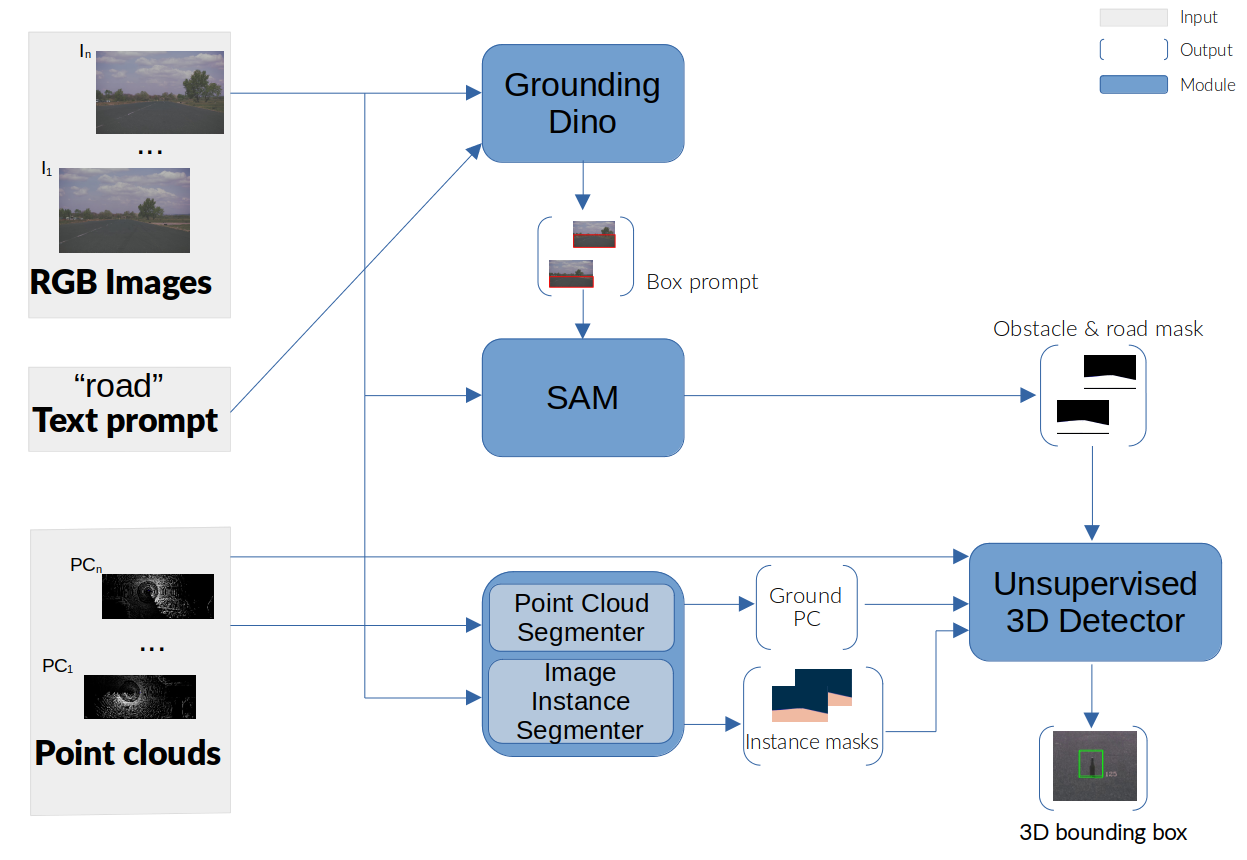
Multimodal Foundational Models for Unsupervised 3D General Obstacle Detection
Tam'as Matuszka, P'eter Hajas, D'avid Szeghy
Current autonomous driving perception models primarily rely on supervised learning with predefined categories. However, these models struggle to detect general obstacles not included in the fixed category set due to their variability and numerous edge cases. To address this issue, we propose a combination of multimodal foundational model-based obstacle segmentation with traditional unsupervised computational geometry-based outlier detection. Our approach operates offline, allowing us to leverage non-causality, and utilizes training-free methods. This enables the detection of general obstacles in 3D without the need for expensive retraining. To overcome the limitations of publicly available obstacle detection datasets, we collected and annotated our dataset, which includes various obstacles even in distant regions.
Read more8/23/2024
🤷
0
UnSAMFlow: Unsupervised Optical Flow Guided by Segment Anything Model
Shuai Yuan, Lei Luo, Zhuo Hui, Can Pu, Xiaoyu Xiang, Rakesh Ranjan, Denis Demandolx
Traditional unsupervised optical flow methods are vulnerable to occlusions and motion boundaries due to lack of object-level information. Therefore, we propose UnSAMFlow, an unsupervised flow network that also leverages object information from the latest foundation model Segment Anything Model (SAM). We first include a self-supervised semantic augmentation module tailored to SAM masks. We also analyze the poor gradient landscapes of traditional smoothness losses and propose a new smoothness definition based on homography instead. A simple yet effective mask feature module has also been added to further aggregate features on the object level. With all these adaptations, our method produces clear optical flow estimation with sharp boundaries around objects, which outperforms state-of-the-art methods on both KITTI and Sintel datasets. Our method also generalizes well across domains and runs very efficiently.
Read more5/7/2024

0
Label-Efficient 3D Object Detection For Road-Side Units
Minh-Quan Dao, Holger Caesar, Julie Stephany Berrio, Mao Shan, Stewart Worrall, Vincent Fr'emont, Ezio Malis
Occlusion presents a significant challenge for safety-critical applications such as autonomous driving. Collaborative perception has recently attracted a large research interest thanks to the ability to enhance the perception of autonomous vehicles via deep information fusion with intelligent roadside units (RSU), thus minimizing the impact of occlusion. While significant advancement has been made, the data-hungry nature of these methods creates a major hurdle for their real-world deployment, particularly due to the need for annotated RSU data. Manually annotating the vast amount of RSU data required for training is prohibitively expensive, given the sheer number of intersections and the effort involved in annotating point clouds. We address this challenge by devising a label-efficient object detection method for RSU based on unsupervised object discovery. Our paper introduces two new modules: one for object discovery based on a spatial-temporal aggregation of point clouds, and another for refinement. Furthermore, we demonstrate that fine-tuning on a small portion of annotated data allows our object discovery models to narrow the performance gap with, or even surpass, fully supervised models. Extensive experiments are carried out in simulated and real-world datasets to evaluate our method.
Read more4/10/2024