Universal Trajectory Optimization Framework for Differential-Driven Robot Class

0

Sign in to get full access
Overview
- Presents a universal trajectory optimization framework for differential-driven robot class
- Focuses on motion planning, trajectory optimization, and nonholonomic dynamics of differential-driven robots
- Demonstrates the framework's effectiveness through simulations and real-world experiments
Plain English Explanation
The paper introduces a universal trajectory optimization framework that can be applied to a class of differential-driven robots. Differential-driven robots are a common type of mobile robot that use two independently controlled wheels to move around.
The framework focuses on the motion planning and trajectory optimization challenges faced by these robots. It takes into account the nonholonomic dynamics of differential-driven robots, which means their motion is constrained by the physical limitations of their wheels.
Through simulations and real-world experiments, the researchers demonstrate the effectiveness of their framework in generating optimal trajectories for differential-driven robots to navigate various environments and tasks.
Technical Explanation
The paper presents a universal trajectory optimization framework that can be used for the motion planning and trajectory optimization of differential-driven robot systems. The key aspects of the framework include:
-
Nonholonomic Dynamics Modeling: The framework incorporates the nonholonomic dynamics of differential-driven robots, which describes the constraints on their motion due to the physical limitations of their wheels.
-
Trajectory Optimization: The framework formulates the trajectory optimization problem as a constrained optimization problem, allowing for the generation of optimal trajectories that consider the robot's dynamics, constraints, and objectives.
-
Generalizability: The framework is designed to be universal, meaning it can be applied to a class of differential-driven robots with varying kinematic and dynamic parameters, without the need for significant modifications.
The researchers validate the effectiveness of the proposed framework through simulations and real-world experiments on various differential-driven robot platforms and tasks, demonstrating its ability to generate safe and efficient trajectories while accounting for the robots' nonholonomic dynamics.
Critical Analysis
The paper presents a comprehensive and systematic approach to trajectory optimization for differential-driven robots, which is an important problem in the field of mobile robotics. The generalizability of the framework is a key strength, as it allows the same approach to be applied to a wide range of differential-driven robot platforms without the need for extensive customization.
However, the paper does not address some potential limitations and areas for further research. For example, the framework assumes perfect knowledge of the robot's dynamics and environment, which may not always be the case in real-world scenarios. Additionally, the paper does not explore the computational efficiency of the optimization process, which is crucial for real-time applications.
Further research could focus on incorporating uncertainty and sensor feedback into the trajectory optimization process, as well as optimizing the computational performance of the framework to enable real-time implementation on resource-constrained robotic platforms.
Conclusion
This paper presents a universal trajectory optimization framework that can be applied to a class of differential-driven robots. The framework effectively models the nonholonomic dynamics of these robots and generates optimal trajectories that consider their physical constraints and task objectives.
The demonstrated effectiveness of the framework through simulations and real-world experiments highlights its potential to improve the motion planning and control of differential-driven robots in a wide range of applications, such as navigation, exploration, and manipulation. Further research to address the identified limitations could lead to even more robust and practical trajectory optimization solutions for this important class of mobile robots.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Universal Trajectory Optimization Framework for Differential-Driven Robot Class
Mengke Zhang, Zhichao Han, Chao Xu, Fei Gao, Yanjun Cao
Differential-driven robots are widely used in various scenarios thanks to their straightforward principle, from household service robots to disaster response field robots. There are several different types of deriving mechanisms considering the real-world applications, including two-wheeled, four-wheeled skid-steering, tracked robots, etc. The differences in the driving mechanism usually require specific kinematic modeling when precise controlling is desired. Furthermore, the nonholonomic dynamics and possible lateral slip lead to different degrees of difficulty in getting feasible and high-quality trajectories. Therefore, a comprehensive trajectory optimization framework to compute trajectories efficiently for various kinds of differential-driven robots is highly desirable. In this paper, we propose a universal trajectory optimization framework that can be applied to differential-driven robot class, enabling the generation of high-quality trajectories within a restricted computational timeframe. We introduce a novel trajectory representation based on polynomial parameterization of motion states or their integrals, such as angular and linear velocities, that inherently matching robots' motion to the control principle for differential-driven robot class. The trajectory optimization problem is formulated to minimize complexity while prioritizing safety and operational efficiency. We then build a full-stack autonomous planning and control system to show the feasibility and robustness. We conduct extensive simulations and real-world testing in crowded environments with three kinds of differential-driven robots to validate the effectiveness of our approach. We will release our method as an open-source package.
Read more9/14/2024
0
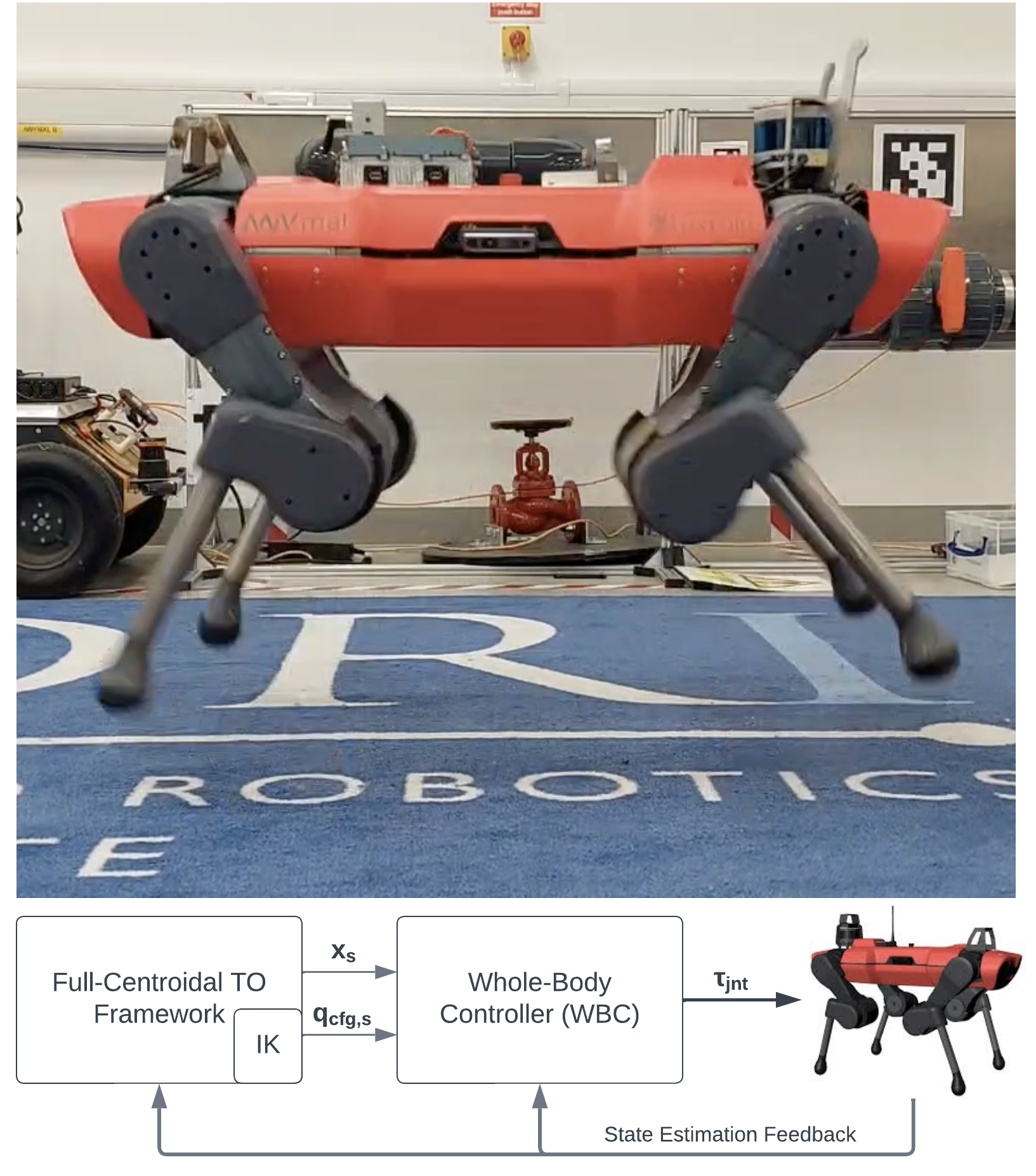
Momentum-Aware Trajectory Optimisation using Full-Centroidal Dynamics and Implicit Inverse Kinematics
Aristotelis Papatheodorou, Wolfgang Merkt, Alexander L. Mitchell, Ioannis Havoutis
The current state-of-the-art gradient-based optimisation frameworks are able to produce impressive dynamic manoeuvres such as linear and rotational jumps. However, these methods, which optimise over the full rigid-body dynamics of the robot, often require precise foothold locations apriori, while real-time performance is not guaranteed without elaborate regularisation and tuning of the cost function. In contrast, we investigate the advantages of a task-space optimisation framework, with special focus on acrobatic motions. Our proposed formulation exploits the system's high-order nonlinearities, such as the nonholonomy of the angular momentum, in order to produce feasible, high-acceleration manoeuvres. By leveraging the full-centroidal dynamics of the quadruped ANYmal C and directly optimising its footholds and contact forces, the framework is capable of producing efficient motion plans with low computational overhead. Finally, we deploy our proposed framework on the ANYmal C platform, and demonstrate its true capabilities through real-world experiments, with the successful execution of high-acceleration motions, such as linear and rotational jumps. Extensive analysis of these shows that the robot's dynamics can be exploited to surpass its hardware limitations of having a high mass and low-torque limits.
Read more9/14/2024
📉
0
A Differentiable Dynamic Modeling Approach to Integrated Motion Planning and Actuator Physical Design for Mobile Manipulators
Zehui Lu, Yebin Wang
This paper investigates the differentiable dynamic modeling of mobile manipulators to facilitate efficient motion planning and physical design of actuators, where the actuator design is parameterized by physically meaningful motor geometry parameters. These parameters impact the manipulator's link mass, inertia, center-of-mass, torque constraints, and angular velocity constraints, influencing control authority in motion planning and trajectory tracking control. A motor's maximum torque/speed and how the design parameters affect the dynamics are modeled analytically, facilitating differentiable and analytical dynamic modeling. Additionally, an integrated locomotion and manipulation planning problem is formulated with direct collocation discretization, using the proposed differentiable dynamics and motor parameterization. Such dynamics are required to capture the dynamic coupling between the base and the manipulator. Numerical experiments demonstrate the effectiveness of differentiable dynamics in speeding up optimization and advantages in task completion time and energy consumption over established sequential motion planning approach. Finally, this paper introduces a simultaneous actuator design and motion planning framework, providing numerical results to validate the proposed differentiable modeling approach for co-design problems.
Read more5/3/2024
🛠️
0
Towards reliable real-time trajectory optimization
Fatemeh Rastgar
Motion planning is a key aspect of robotics. A common approach to address motion planning problems is trajectory optimization. Trajectory optimization can represent the high-level behaviors of robots through mathematical formulations. However, current trajectory optimization approaches have two main challenges. Firstly, their solution heavily depends on the initial guess, and they are prone to get stuck in local minima. Secondly, they face scalability limitations by increasing the number of constraints. This thesis endeavors to tackle these challenges by introducing four innovative trajectory optimization algorithms to improve reliability, scalability, and computational efficiency. There are two novel aspects of the proposed algorithms. The first key innovation is remodeling the kinematic constraints and collision avoidance constraints. Another key innovation lies in the design of algorithms that effectively utilize parallel computation on GPU accelerators. By using reformulated constraints and leveraging the computational power of GPUs, the proposed algorithms of this thesis demonstrate significant improvements in efficiency and scalability compared to the existing methods. Parallelization enables faster computation times, allowing for real-time decision-making in dynamic environments. Moreover, the algorithms are designed to adapt to changes in the environment, ensuring robust performance. Extensive benchmarking for each proposed optimizer validates their efficacy. Overall, this thesis makes a significant contribution to the field of trajectory optimization algorithms. It introduces innovative solutions that specifically address the challenges faced by existing methods. The proposed algorithms pave the way for more efficient and robust motion planning solutions in robotics by leveraging parallel computation and specific mathematical structures.
Read more8/21/2024