Unleashing HyDRa: Hybrid Fusion, Depth Consistency and Radar for Unified 3D Perception
2403.07746
0
0

Abstract
Low-cost, vision-centric 3D perception systems for autonomous driving have made significant progress in recent years, narrowing the gap to expensive LiDAR-based methods. The primary challenge in becoming a fully reliable alternative lies in robust depth prediction capabilities, as camera-based systems struggle with long detection ranges and adverse lighting and weather conditions. In this work, we introduce HyDRa, a novel camera-radar fusion architecture for diverse 3D perception tasks. Building upon the principles of dense BEV (Bird's Eye View)-based architectures, HyDRa introduces a hybrid fusion approach to combine the strengths of complementary camera and radar features in two distinct representation spaces. Our Height Association Transformer module leverages radar features already in the perspective view to produce more robust and accurate depth predictions. In the BEV, we refine the initial sparse representation by a Radar-weighted Depth Consistency. HyDRa achieves a new state-of-the-art for camera-radar fusion of 64.2 NDS (+1.8) and 58.4 AMOTA (+1.5) on the public nuScenes dataset. Moreover, our new semantically rich and spatially accurate BEV features can be directly converted into a powerful occupancy representation, beating all previous camera-based methods on the Occ3D benchmark by an impressive 3.7 mIoU. Code and models are available at https://github.com/phi-wol/hydra.
Create account to get full access
Overview
- This paper introduces "HyDRa", a novel approach for unified 3D perception that combines camera, depth, and radar data.
- The key innovations include a hybrid fusion module, depth consistency, and radar-specific processing to enhance 3D object detection and segmentation.
- The proposed method outperforms state-of-the-art camera-based and camera-radar fusion methods on several benchmark datasets.
Plain English Explanation
The paper describes a new system called "HyDRa" that combines information from different sensors - cameras, depth sensors, and radar - to improve 3D perception for applications like self-driving cars. Traditional systems often rely solely on camera data, which can be limited, or fuse camera and radar data in a basic way.
HyDRa introduces several key advances to get more out of these sensor inputs. First, it has a "hybrid fusion" module that intelligently combines the camera, depth, and radar data in a more sophisticated way. Second, it enforces "depth consistency" to make sure the depth information from different sources aligns properly. And third, it has specialized processing for the radar data to better utilize its unique capabilities.
These innovations allow HyDRa to outperform other state-of-the-art 3D perception systems that only use cameras or simpler camera-radar fusion. This could lead to significant improvements in the 3D understanding capabilities of autonomous vehicles and other applications that rely on accurate 3D perception of the environment.
Technical Explanation
The paper proposes a new method called "HyDRa" that combines data from cameras, depth sensors, and radar to enable more robust and accurate 3D perception. The key technical contributions include:
-
Hybrid Fusion Module: HyDRa uses a "hybrid fusion" approach that fuses camera, depth, and radar features at multiple levels of the neural network architecture. This allows the model to effectively leverage the complementary strengths of each sensor.
-
Depth Consistency: The system enforces depth consistency by introducing a depth consistency loss that encourages the predicted depth maps from different sensors to align. This helps resolve ambiguities and improve overall depth estimation.
-
Radar-specific Processing: HyDRa includes specialized radar processing modules that extract radar-specific features and fuse them with the camera and depth information. This allows the model to better utilize the unique capabilities of radar data.
The authors evaluate HyDRa on several benchmark datasets for 3D object detection and segmentation, demonstrating significant improvements over state-of-the-art camera-based and camera-radar fusion approaches. For example, on the KITTI 3D object detection task, HyDRa achieves a 9% boost in average precision compared to the best-performing camera-only method.
Critical Analysis
The paper provides a compelling technical contribution by introducing a novel and effective approach for fusing camera, depth, and radar data for 3D perception. The use of hybrid fusion, depth consistency, and radar-specific processing are well-motivated and appear to yield tangible performance gains.
However, the paper does not address some potential limitations or concerns. For example, the reliance on depth sensors, which may not be available in all real-world scenarios, could limit the practical applicability of the method. Additionally, the computational complexity and inference time of the HyDRa architecture are not analyzed, which could be an important consideration for deployment in resource-constrained environments like autonomous vehicles.
Further research could also explore the robustness of HyDRa to sensor failures or degradation, as well as its generalization to a wider range of environments and object categories beyond the specific benchmarks considered in this work. Lastly, a more thorough analysis of the individual contributions of each technical component could help provide additional insights into the system's inner workings.
Conclusion
The "HyDRa" system presented in this paper represents an important advance in the field of 3D perception, demonstrating the value of fusing complementary sensor modalities like cameras, depth sensors, and radar. The proposed hybrid fusion, depth consistency, and radar-specific processing techniques effectively leverage the strengths of each sensor to achieve state-of-the-art performance on 3D object detection and segmentation tasks.
While the paper does not address all potential limitations, the core technical innovations of HyDRa have significant implications for autonomous vehicles, robotics, and other applications that require robust and accurate 3D understanding of the environment. Further research and development in this direction could lead to transformative improvements in the safety and capabilities of these systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Lift-Attend-Splat: Bird's-eye-view camera-lidar fusion using transformers
James Gunn, Zygmunt Lenyk, Anuj Sharma, Andrea Donati, Alexandru Buburuzan, John Redford, Romain Mueller
0
0
Combining complementary sensor modalities is crucial to providing robust perception for safety-critical robotics applications such as autonomous driving (AD). Recent state-of-the-art camera-lidar fusion methods for AD rely on monocular depth estimation which is a notoriously difficult task compared to using depth information from the lidar directly. Here, we find that this approach does not leverage depth as expected and show that naively improving depth estimation does not lead to improvements in object detection performance. Strikingly, we also find that removing depth estimation altogether does not degrade object detection performance substantially, suggesting that relying on monocular depth could be an unnecessary architectural bottleneck during camera-lidar fusion. In this work, we introduce a novel fusion method that bypasses monocular depth estimation altogether and instead selects and fuses camera and lidar features in a bird's-eye-view grid using a simple attention mechanism. We show that our model can modulate its use of camera features based on the availability of lidar features and that it yields better 3D object detection on the nuScenes dataset than baselines relying on monocular depth estimation.
5/22/2024
A Survey of Deep Learning Based Radar and Vision Fusion for 3D Object Detection in Autonomous Driving
Di Wu, Feng Yang, Benlian Xu, Pan Liao, Bo Liu
0
0
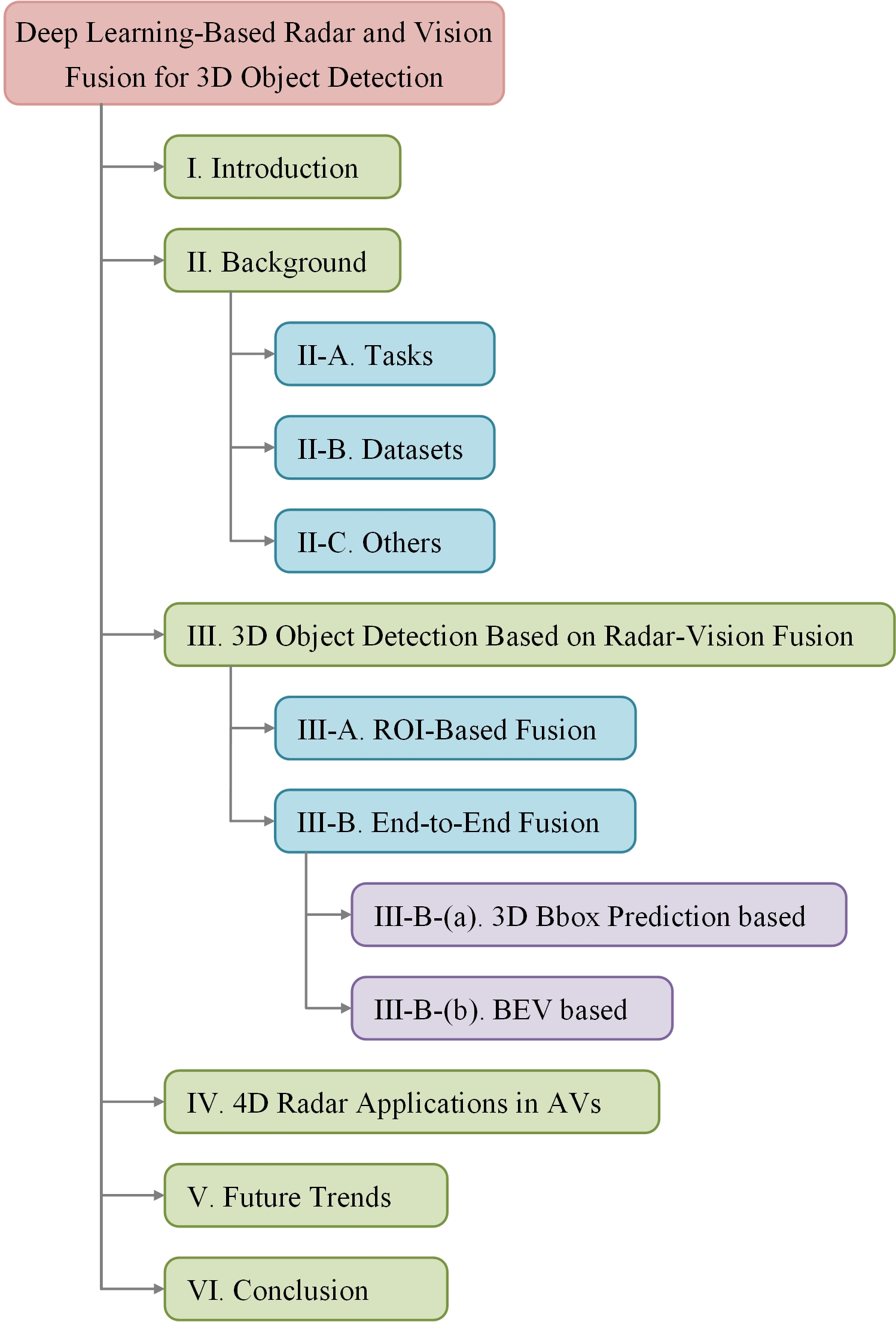
With the rapid advancement of autonomous driving technology, there is a growing need for enhanced safety and efficiency in the automatic environmental perception of vehicles during their operation. In modern vehicle setups, cameras and mmWave radar (radar), being the most extensively employed sensors, demonstrate complementary characteristics, inherently rendering them conducive to fusion and facilitating the achievement of both robust performance and cost-effectiveness. This paper focuses on a comprehensive survey of radar-vision (RV) fusion based on deep learning methods for 3D object detection in autonomous driving. We offer a comprehensive overview of each RV fusion category, specifically those employing region of interest (ROI) fusion and end-to-end fusion strategies. As the most promising fusion strategy at present, we provide a deeper classification of end-to-end fusion methods, including those 3D bounding box prediction based and BEV based approaches. Moreover, aligning with recent advancements, we delineate the latest information on 4D radar and its cutting-edge applications in autonomous vehicles (AVs). Finally, we present the possible future trends of RV fusion and summarize this paper.
6/4/2024
Better Monocular 3D Detectors with LiDAR from the Past
Yurong You, Cheng Perng Phoo, Carlos Andres Diaz-Ruiz, Katie Z Luo, Wei-Lun Chao, Mark Campbell, Bharath Hariharan, Kilian Q Weinberger
0
0
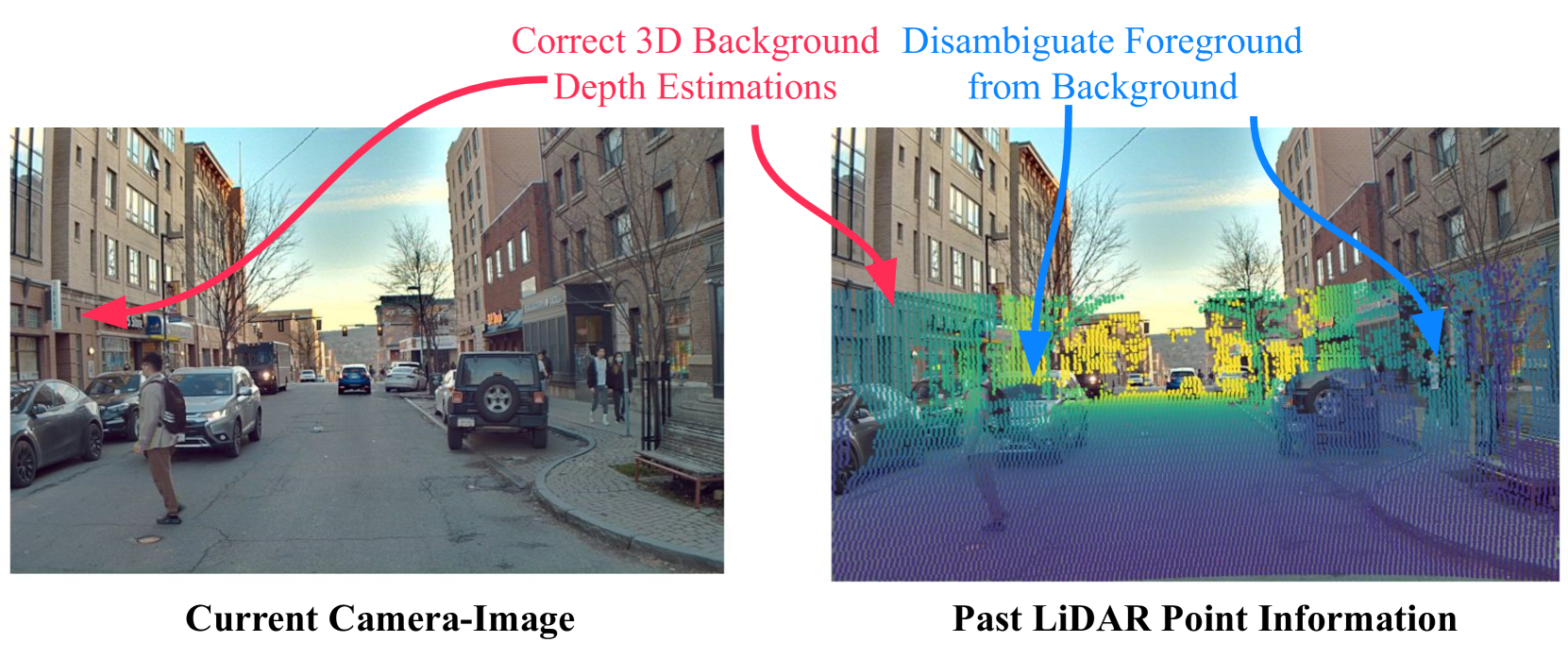
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
4/11/2024

Enhanced Radar Perception via Multi-Task Learning: Towards Refined Data for Sensor Fusion Applications
Huawei Sun, Hao Feng, Gianfranco Mauro, Julius Ott, Georg Stettinger, Lorenzo Servadei, Robert Wille
0
0
Radar and camera fusion yields robustness in perception tasks by leveraging the strength of both sensors. The typical extracted radar point cloud is 2D without height information due to insufficient antennas along the elevation axis, which challenges the network performance. This work introduces a learning-based approach to infer the height of radar points associated with 3D objects. A novel robust regression loss is introduced to address the sparse target challenge. In addition, a multi-task training strategy is employed, emphasizing important features. The average radar absolute height error decreases from 1.69 to 0.25 meters compared to the state-of-the-art height extension method. The estimated target height values are used to preprocess and enrich radar data for downstream perception tasks. Integrating this refined radar information further enhances the performance of existing radar camera fusion models for object detection and depth estimation tasks.
4/10/2024