Unleashing the Potential of Mamba: Boosting a LiDAR 3D Sparse Detector by Using Cross-Model Knowledge Distillation

0

Sign in to get full access
Overview
- The paper proposes a technique called "Cross-Model Knowledge Distillation" to boost the performance of a LiDAR-based 3D sparse object detector called Mamba.
- By distilling knowledge from a more complex model, the simpler Mamba model can achieve better detection accuracy without sacrificing inference speed.
- This approach aims to unlock the full potential of the Mamba detector by leveraging complementary information from a different type of model.
Plain English Explanation
The researchers developed a way to make a LiDAR-based 3D object detection model called Mamba perform better. LiDAR is a technology that uses laser light to measure distances and create 3D maps of the environment.
Mamba is a relatively simple and fast 3D object detector that uses LiDAR data. However, its detection accuracy is not as high as more complex models. To improve Mamba's performance without slowing it down, the researchers used a technique called "Cross-Model Knowledge Distillation."
This involves taking what a more complex model has learned and transferring that knowledge to the simpler Mamba model. The complex model acts as a "teacher," sharing its insights with the "student" Mamba model. This allows Mamba to benefit from the richer understanding of the complex model, boosting its own detection capabilities.
By distilling this cross-model knowledge, the researchers were able to enhance Mamba's ability to accurately identify objects in 3D LiDAR data, without compromising its speed. This unlocks the full potential of the Mamba detector, making it a more powerful tool for applications like self-driving cars or robotics that rely on real-time 3D object detection.
Technical Explanation
The paper introduces a technique called "Cross-Model Knowledge Distillation" to improve the performance of the Mamba LiDAR 3D sparse object detector. Mamba is a lightweight and fast model, but its detection accuracy is lower than more complex 3D object detectors.
To boost Mamba's capabilities, the researchers leverage knowledge from a separate, more complex 3D object detection model. This "teacher" model serves as a source of complementary information that can be distilled into the "student" Mamba model. The distillation process allows Mamba to benefit from the richer feature representations and stronger object detection performance of the complex model, without sacrificing Mamba's inference speed.
The researchers design a dedicated cross-model distillation loss function that aligns the feature representations between the teacher and student models. This encourages the student Mamba model to mimic the behavior of the more powerful teacher model, effectively transferring its learned knowledge.
Experiments show that this Cross-Model Knowledge Distillation approach significantly improves the 3D object detection performance of the Mamba model, surpassing the accuracy of the original Mamba while maintaining its fast inference time. The technique demonstrates the potential of leveraging knowledge from complementary models to boost the capabilities of a lightweight, sparse 3D object detector.
Critical Analysis
The paper presents a compelling approach to improving the performance of the Mamba 3D object detector, a key component for many real-world applications like autonomous vehicles and robotics. By distilling knowledge from a more complex model, the researchers are able to enhance Mamba's detection accuracy without compromising its inference speed.
However, the paper does not provide extensive details on the specific architectures of the teacher and student models, nor does it explore the generalizability of the approach to other 3D object detection models. Additional experiments comparing the distillation technique to other knowledge transfer methods could further validate the effectiveness of the proposed approach.
Moreover, the paper does not address potential limitations or edge cases that may arise when applying the Cross-Model Knowledge Distillation technique in practice. For example, it would be valuable to understand how the method performs under varying sensor conditions, object occlusions, or domain shifts, which are common challenges in real-world 3D object detection tasks.
Overall, the paper demonstrates a promising direction for boosting the capabilities of lightweight 3D object detectors, but further research is needed to fully assess the robustness and generalizability of the Cross-Model Knowledge Distillation approach.
Conclusion
The paper presents a novel technique called "Cross-Model Knowledge Distillation" that leverages complementary information from a more complex 3D object detection model to enhance the performance of the lightweight Mamba LiDAR-based detector. By distilling the learned knowledge from the teacher model, the student Mamba model can achieve higher detection accuracy without sacrificing its fast inference speed.
This approach unlocks the full potential of the Mamba detector, making it a more powerful tool for real-time 3D object detection in applications like autonomous vehicles and robotics. The ability to boost the capabilities of a sparse, lightweight model through knowledge distillation from a complementary model opens up new opportunities for deploying efficient and accurate 3D perception systems in resource-constrained environments.
The paper demonstrates the value of cross-model knowledge transfer and highlights the importance of exploring novel techniques to optimize the trade-off between model complexity and performance. As the field of 3D object detection continues to evolve, approaches like the one presented in this paper will play a crucial role in unlocking the full potential of lightweight, efficient models for real-world deployment.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Unleashing the Potential of Mamba: Boosting a LiDAR 3D Sparse Detector by Using Cross-Model Knowledge Distillation
Rui Yu, Runkai Zhao, Jiagen Li, Qingsong Zhao, Songhao Zhu, HuaiCheng Yan, Meng Wang
The LiDAR-based 3D object detector that strikes a balance between accuracy and speed is crucial for achieving real-time perception in autonomous driving and robotic navigation systems. To enhance the accuracy of point cloud detection, integrating global context for visual understanding improves the point clouds ability to grasp overall spatial information. However, many existing LiDAR detection models depend on intricate feature transformation and extraction processes, leading to poor real-time performance and high resource consumption, which limits their practical effectiveness. In this work, we propose a Faster LiDAR 3D object detection framework, called FASD, which implements heterogeneous model distillation by adaptively uniform cross-model voxel features. We aim to distill the transformer's capacity for high-performance sequence modeling into Mamba models with low FLOPs, achieving a significant improvement in accuracy through knowledge transfer. Specifically, Dynamic Voxel Group and Adaptive Attention strategies are integrated into the sparse backbone, creating a robust teacher model with scale-adaptive attention for effective global visual context modeling. Following feature alignment with the Adapter, we transfer knowledge from the Transformer to the Mamba through latent space feature supervision and span-head distillation, resulting in improved performance and an efficient student model. We evaluated the framework on the Waymo and nuScenes datasets, achieving a 4x reduction in resource consumption and a 1-2% performance improvement over the current SoTA methods.
Read more9/18/2024
0
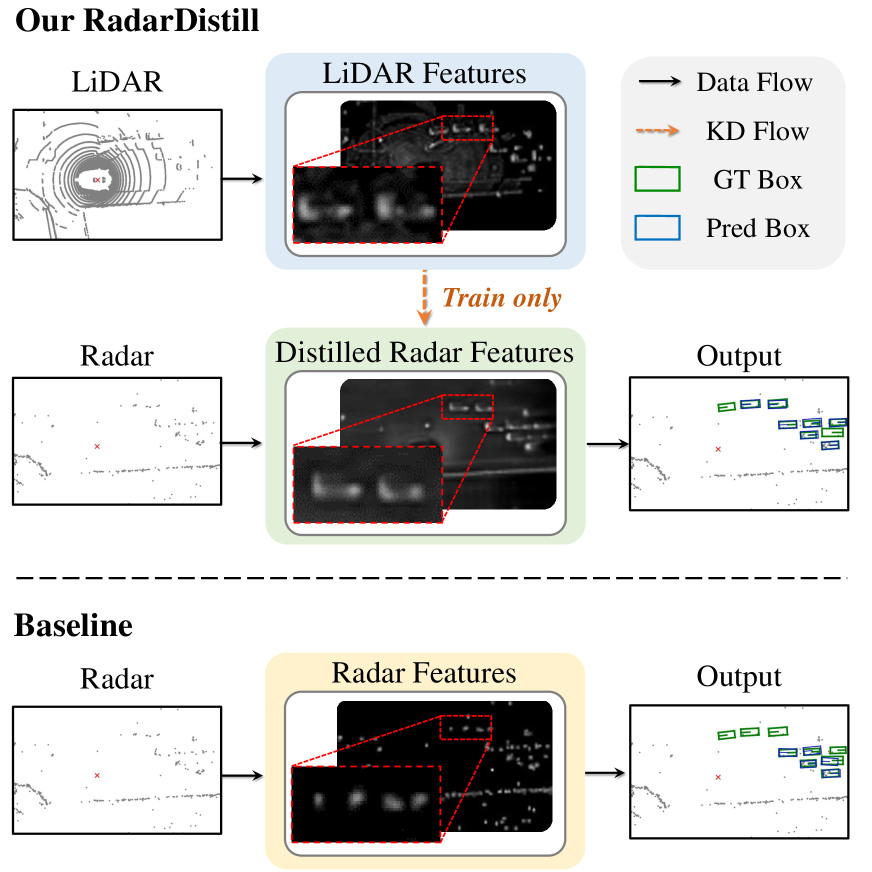
RadarDistill: Boosting Radar-based Object Detection Performance via Knowledge Distillation from LiDAR Features
Geonho Bang, Kwangjin Choi, Jisong Kim, Dongsuk Kum, Jun Won Choi
The inherent noisy and sparse characteristics of radar data pose challenges in finding effective representations for 3D object detection. In this paper, we propose RadarDistill, a novel knowledge distillation (KD) method, which can improve the representation of radar data by leveraging LiDAR data. RadarDistill successfully transfers desirable characteristics of LiDAR features into radar features using three key components: Cross-Modality Alignment (CMA), Activation-based Feature Distillation (AFD), and Proposal-based Feature Distillation (PFD). CMA enhances the density of radar features by employing multiple layers of dilation operations, effectively addressing the challenge of inefficient knowledge transfer from LiDAR to radar. AFD selectively transfers knowledge based on regions of the LiDAR features, with a specific focus on areas where activation intensity exceeds a predefined threshold. PFD similarly guides the radar network to selectively mimic features from the LiDAR network within the object proposals. Our comparative analyses conducted on the nuScenes datasets demonstrate that RadarDistill achieves state-of-the-art (SOTA) performance for radar-only object detection task, recording 20.5% in mAP and 43.7% in NDS. Also, RadarDistill significantly improves the performance of the camera-radar fusion model.
Read more4/8/2024
0
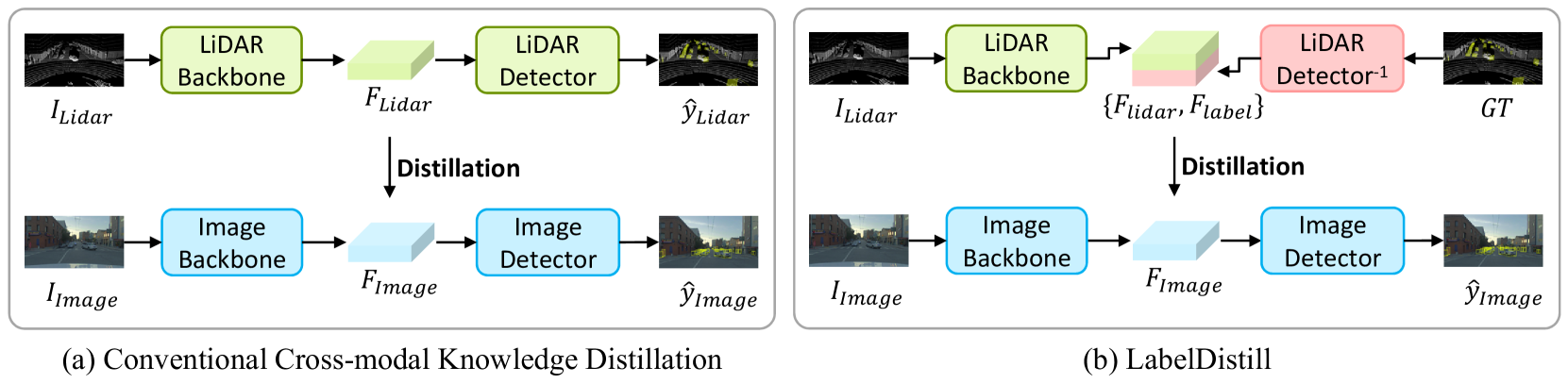
LabelDistill: Label-guided Cross-modal Knowledge Distillation for Camera-based 3D Object Detection
Sanmin Kim, Youngseok Kim, Sihwan Hwang, Hyeonjun Jeong, Dongsuk Kum
Recent advancements in camera-based 3D object detection have introduced cross-modal knowledge distillation to bridge the performance gap with LiDAR 3D detectors, leveraging the precise geometric information in LiDAR point clouds. However, existing cross-modal knowledge distillation methods tend to overlook the inherent imperfections of LiDAR, such as the ambiguity of measurements on distant or occluded objects, which should not be transferred to the image detector. To mitigate these imperfections in LiDAR teacher, we propose a novel method that leverages aleatoric uncertainty-free features from ground truth labels. In contrast to conventional label guidance approaches, we approximate the inverse function of the teacher's head to effectively embed label inputs into feature space. This approach provides additional accurate guidance alongside LiDAR teacher, thereby boosting the performance of the image detector. Additionally, we introduce feature partitioning, which effectively transfers knowledge from the teacher modality while preserving the distinctive features of the student, thereby maximizing the potential of both modalities. Experimental results demonstrate that our approach improves mAP and NDS by 5.1 points and 4.9 points compared to the baseline model, proving the effectiveness of our approach. The code is available at https://github.com/sanmin0312/LabelDistill
Read more7/16/2024
📈
0
Mamba3D: Enhancing Local Features for 3D Point Cloud Analysis via State Space Model
Xu Han, Yuan Tang, Zhaoxuan Wang, Xianzhi Li
Existing Transformer-based models for point cloud analysis suffer from quadratic complexity, leading to compromised point cloud resolution and information loss. In contrast, the newly proposed Mamba model, based on state space models (SSM), outperforms Transformer in multiple areas with only linear complexity. However, the straightforward adoption of Mamba does not achieve satisfactory performance on point cloud tasks. In this work, we present Mamba3D, a state space model tailored for point cloud learning to enhance local feature extraction, achieving superior performance, high efficiency, and scalability potential. Specifically, we propose a simple yet effective Local Norm Pooling (LNP) block to extract local geometric features. Additionally, to obtain better global features, we introduce a bidirectional SSM (bi-SSM) with both a token forward SSM and a novel backward SSM that operates on the feature channel. Extensive experimental results show that Mamba3D surpasses Transformer-based counterparts and concurrent works in multiple tasks, with or without pre-training. Notably, Mamba3D achieves multiple SoTA, including an overall accuracy of 92.6% (train from scratch) on the ScanObjectNN and 95.1% (with single-modal pre-training) on the ModelNet40 classification task, with only linear complexity. Our code and weights are available at https://github.com/xhanxu/Mamba3D.
Read more9/4/2024