Unsupervised Point Cloud Registration with Self-Distillation

0

Sign in to get full access
Overview
- Provides a plain English summary of a research paper on unsupervised point cloud registration using self-distillation.
- Covers the key ideas, significance, technical details, and critical analysis of the research.
- Aims to make the complex technical content more accessible to a general audience.
Plain English Explanation
This research paper presents a new approach for automatically aligning and combining 3D point cloud data without the need for manual labeling or supervision. Point clouds are 3D representations of objects or environments made up of many individual data points. Aligning these point clouds is an important task in fields like robotics, 3D modeling, and augmented reality.
The researchers developed a self-distillation technique that allows the system to learn how to register point clouds through a process of teaching itself. Rather than relying on pre-labeled training data, the model is trained in an unsupervised way by predicting the alignment between related point cloud pairs and then refining its own predictions. This makes the approach more flexible and scalable compared to previous supervised methods.
The key innovation is using a "teacher" model to guide the "student" model during training, gradually improving the student's ability to register point clouds accurately. The researchers show this self-distillation approach outperforms other unsupervised point cloud registration techniques on standard benchmarks.
Technical Explanation
The paper proposes an unsupervised point cloud registration framework that learns to align 3D point clouds without any labeled training data. The core idea is to leverage self-distillation, where a "teacher" model guides the training of a "student" model to gradually improve its point cloud registration capabilities.
The system consists of an encoder network that encodes the input point clouds, a transformer module that predicts the relative 6D pose (3D translation and 3D rotation) between the point clouds, and a decoder that reconstructs the aligned point clouds. During training, the teacher model provides supervision signals to the student model, helping it learn accurate point cloud registration in an unsupervised manner.
Key technical insights include:
- Correspondence-free SE(3) point cloud registration: The system does not require explicit point-to-point correspondences, which are difficult to obtain in practice.
- Deep learning-based point cloud registration: The end-to-end neural network architecture enables flexible, data-driven point cloud registration.
- Self-distillation: The teacher-student training approach allows the model to learn effective registration without labeled data.
The paper demonstrates the effectiveness of this unsupervised point cloud registration approach on several standard benchmarks, outperforming prior unsupervised methods.
Critical Analysis
The paper presents a novel and promising approach to unsupervised point cloud registration, addressing some key limitations of previous work. The self-distillation technique is an interesting contribution that allows the model to learn effective registration without relying on labeled training data.
However, the paper does not thoroughly discuss the potential limitations or failure cases of the proposed method. For example, it is unclear how the approach would perform on highly noisy or sparse point clouds, or how well it would generalize to drastically different types of 3D data.
Additionally, the researchers could have provided more insight into the internal representations and decision-making processes of the neural network models. Understanding these aspects could lead to further improvements or interpretability of the system.
Future research could explore ways to make the self-distillation process more robust and stable, as well as investigate applications of the technique beyond just point cloud registration. Incorporating additional contextual or semantic information could also potentially enhance the registration performance.
Conclusion
This research presents an unsupervised point cloud registration framework that leverages self-distillation to learn effective alignment of 3D point clouds without the need for labeled training data. The key innovation is using a teacher-student training approach, where the teacher model guides the student model to gradually improve its registration capabilities.
The results demonstrate the potential of this self-distillation technique for making point cloud registration more flexible and accessible, with potential applications in robotics, 3D modeling, and augmented reality. While the paper could have provided more insights into the limitations and future directions, the overall approach represents an important step forward in the field of unsupervised 3D data alignment.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Unsupervised Point Cloud Registration with Self-Distillation
Christian Lowens, Thorben Funke, Andr'e Wagner, Alexandru Paul Condurache
Rigid point cloud registration is a fundamental problem and highly relevant in robotics and autonomous driving. Nowadays deep learning methods can be trained to match a pair of point clouds, given the transformation between them. However, this training is often not scalable due to the high cost of collecting ground truth poses. Therefore, we present a self-distillation approach to learn point cloud registration in an unsupervised fashion. Here, each sample is passed to a teacher network and an augmented view is passed to a student network. The teacher includes a trainable feature extractor and a learning-free robust solver such as RANSAC. The solver forces consistency among correspondences and optimizes for the unsupervised inlier ratio, eliminating the need for ground truth labels. Our approach simplifies the training procedure by removing the need for initial hand-crafted features or consecutive point cloud frames as seen in related methods. We show that our method not only surpasses them on the RGB-D benchmark 3DMatch but also generalizes well to automotive radar, where classical features adopted by others fail. The code is available at https://github.com/boschresearch/direg .
Read more9/14/2024
0
FreeReg: Image-to-Point Cloud Registration Leveraging Pretrained Diffusion Models and Monocular Depth Estimators
Haiping Wang, Yuan Liu, Bing Wang, Yujing Sun, Zhen Dong, Wenping Wang, Bisheng Yang
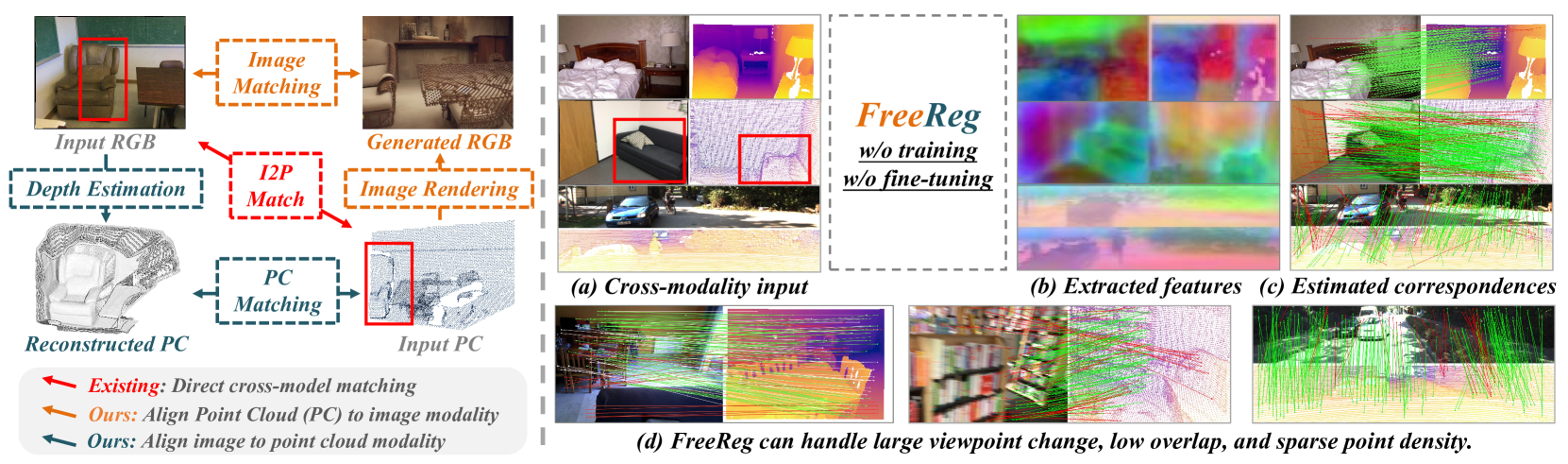
Matching cross-modality features between images and point clouds is a fundamental problem for image-to-point cloud registration. However, due to the modality difference between images and points, it is difficult to learn robust and discriminative cross-modality features by existing metric learning methods for feature matching. Instead of applying metric learning on cross-modality data, we propose to unify the modality between images and point clouds by pretrained large-scale models first, and then establish robust correspondence within the same modality. We show that the intermediate features, called diffusion features, extracted by depth-to-image diffusion models are semantically consistent between images and point clouds, which enables the building of coarse but robust cross-modality correspondences. We further extract geometric features on depth maps produced by the monocular depth estimator. By matching such geometric features, we significantly improve the accuracy of the coarse correspondences produced by diffusion features. Extensive experiments demonstrate that without any task-specific training, direct utilization of both features produces accurate image-to-point cloud registration. On three public indoor and outdoor benchmarks, the proposed method averagely achieves a 20.6 percent improvement in Inlier Ratio, a three-fold higher Inlier Number, and a 48.6 percent improvement in Registration Recall than existing state-of-the-arts.
Read more4/16/2024
0
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Rui She, Qiyu Kang, Sijie Wang, Wee Peng Tay, Kai Zhao, Yang Song, Tianyu Geng, Yi Xu, Diego Navarro Navarro, Andreas Hartmannsgruber
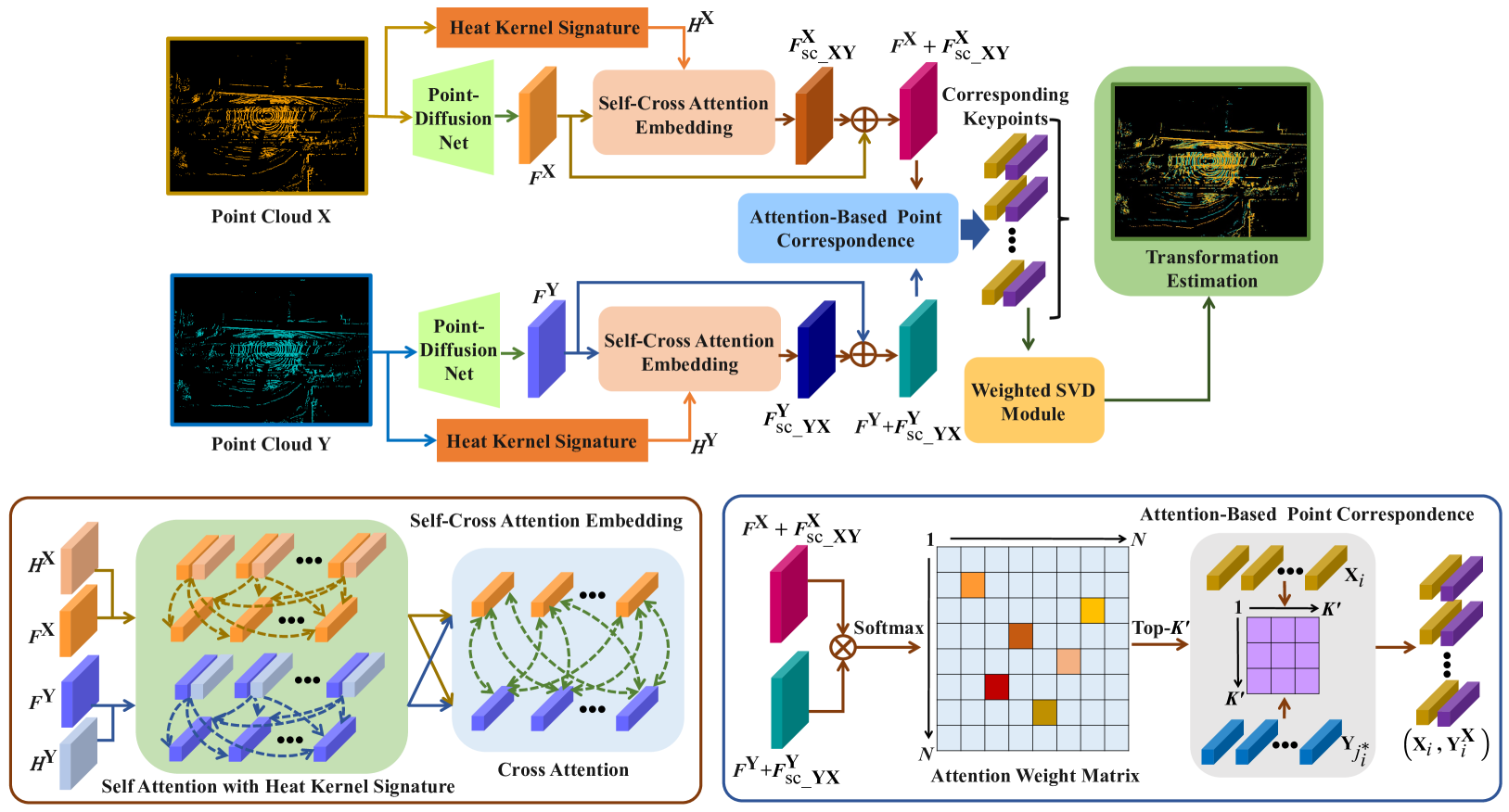
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.
Read more4/23/2024

0
Correspondence-Free SE(3) Point Cloud Registration in RKHS via Unsupervised Equivariant Learning
Ray Zhang, Zheming Zhou, Min Sun, Omid Ghasemalizadeh, Cheng-Hao Kuo, Ryan Eustice, Maani Ghaffari, Arnie Sen
This paper introduces a robust unsupervised SE(3) point cloud registration method that operates without requiring point correspondences. The method frames point clouds as functions in a reproducing kernel Hilbert space (RKHS), leveraging SE(3)-equivariant features for direct feature space registration. A novel RKHS distance metric is proposed, offering reliable performance amidst noise, outliers, and asymmetrical data. An unsupervised training approach is introduced to effectively handle limited ground truth data, facilitating adaptation to real datasets. The proposed method outperforms classical and supervised methods in terms of registration accuracy on both synthetic (ModelNet40) and real-world (ETH3D) noisy, outlier-rich datasets. To our best knowledge, this marks the first instance of successful real RGB-D odometry data registration using an equivariant method. The code is available at {https://sites.google.com/view/eccv24-equivalign}
Read more7/30/2024