Fast Estimation of Relative Transformation Based on Fusion of Odometry and UWB Ranging Data
2405.12577
0
0
📊
Abstract
In this paper, we investigate the problem of estimating the 4-DOF (three-dimensional position and orientation) robot-robot relative frame transformation using odometers and distance measurements between robots. Firstly, we apply a two-step estimation method based on maximum likelihood estimation. Specifically, a good initial value is obtained through unconstrained least squares and projection, followed by a more accurate estimate achieved through one-step Gauss-Newton iteration. Additionally, the optimal installation positions of Ultra-Wideband (UWB) are provided, and the minimum operating time under different quantities of UWB devices is determined. Simulation demonstrates that the two-step approach offers faster computation with guaranteed accuracy while effectively addressing the relative transformation estimation problem within limited space constraints. Furthermore, this method can be applied to real-time relative transformation estimation when a specific number of UWB devices are installed.
Create account to get full access
Overview
- Estimating the 4-DOF (three-dimensional position and orientation) robot-robot relative frame transformation using odometers and distance measurements between robots
- Applying a two-step estimation method based on maximum likelihood estimation
- Determining optimal installation positions of Ultra-Wideband (UWB) devices and minimum operating time for different quantities of UWB devices
- Demonstrating faster computation with guaranteed accuracy to address relative transformation estimation within limited space constraints
- Enabling real-time relative transformation estimation with a specific number of UWB devices installed
Plain English Explanation
The paper investigates a method for determining the relative position and orientation between two robots using odometers (sensors that measure the distance and direction a robot has traveled) and distance measurements between the robots. The researchers apply a two-step approach to estimate this 4-DOF (four degrees of freedom) relative transformation.
First, they obtain a good initial estimate through unconstrained least squares and projection. Then, they refine this estimate using a more accurate one-step Gauss-Newton iteration. The researchers also provide guidance on the optimal placement of Ultra-Wideband (UWB) devices, which can be used to measure distances between the robots, as well as the minimum required operating time for different numbers of UWB devices.
The key benefits of this approach are faster computation while maintaining accuracy, and the ability to effectively estimate the relative transformation between robots within limited spaces. This method can be applied in real-time when a specific number of UWB devices are installed, enabling accurate tracking of the robots' relative motion.
Technical Explanation
The paper presents a two-step approach to estimate the 4-DOF robot-robot relative frame transformation using odometers and distance measurements between the robots. The first step involves obtaining a good initial estimate through unconstrained least squares and projection. This is then refined in the second step using a one-step Gauss-Newton iteration, which provides a more accurate final estimate.
To support this estimation process, the researchers also determine the optimal installation positions for Ultra-Wideband (UWB) devices, which can measure the distances between the robots. They also calculate the minimum required operating time for different quantities of UWB devices.
Simulation results demonstrate that this two-step approach offers faster computation while maintaining guaranteed accuracy, effectively addressing the relative transformation estimation problem within limited space constraints. Furthermore, the researchers show that this method can be applied to real-time relative transformation estimation when a specific number of UWB devices are installed.
Critical Analysis
The paper presents a robust and efficient approach to estimating the relative transformation between robots, which is a crucial task in many robotic applications. The two-step estimation method, with its initial least squares-based estimate and subsequent Gauss-Newton refinement, appears to be a well-designed solution that balances computational efficiency and accuracy.
One potential limitation of the research is the reliance on simulation data, as the performance of the method on real-world robotic systems may differ from the simulation results. Additionally, the paper does not provide a detailed analysis of the sensitivity of the approach to factors such as sensor noise or environmental conditions, which could impact its practical applicability.
Further research could explore the adaptability of the anchor pair selection for the UWB devices or investigate the integration of this relative transformation estimation method with other localization techniques, such as radar odometry, to provide a more comprehensive solution for robot navigation and coordination. Nevertheless, the methods presented in this paper represent a valuable contribution to the field of robot-robot relative localization.
Conclusion
This paper proposes a novel two-step approach to estimate the 4-DOF robot-robot relative frame transformation using odometers and distance measurements between robots. The key advantages of this method are its computational efficiency and guaranteed accuracy, making it well-suited for real-time applications within limited space constraints.
The researchers also provide insights into the optimal placement of UWB devices and the minimum required operating time, further enhancing the practical implementation of this relative transformation estimation technique. While the simulation results are promising, additional real-world testing and analysis could help further validate the method's performance and identify any potential limitations.
Overall, this research represents a significant step forward in enabling accurate and efficient relative localization between robots, which is crucial for coordinating multi-robot systems and advancing the field of robotics as a whole.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Multi-Robot Collaborative Localization and Planning with Inter-Ranging
Derek Knowles, Adam Dai, Grace Gao
0
0
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common anchor and tag UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
6/26/2024
❗
Utilizing acceleration measurements to improve TDOA based localization
Marcin Kolakowski
0
0
In this paper localization using UWB positioning system and an inertial unit containing a single accelerometer is considered. The main part of the paper describes a novel algorithm for person localization. The algorithm is based on modified Extended Kalman Filter and utilizes TDOA (Time Difference of Arrival) results obtained from UWB system and results of acceleration measurement performed by the localized tag device. The proposed algorithm has been experimentally investigated through simulation and experiments. The results are included in the paper.
4/1/2024
🎯
Cooperative Relative Localization in MAV Swarms with Ultra-wideband Ranging
Changrui Liu, Sven U. Pfeiffer, Guido C. H. E. de Croon
0
0
Relative localization (RL) is essential for the successful operation of micro air vehicle (MAV) swarms. Achieving accurate 3-D RL in infrastructure-free and GPS-denied environments with only distance information is a challenging problem that has not been satisfactorily solved. In this work, based on the range-based peer-to-peer RL using the ultra-wideband (UWB) ranging technique, we develop a novel UWB-based cooperative relative localization (CRL) solution that integrates the relative motion dynamics of each host-neighbor pair to build a unified dynamic model and takes the distances between the neighbors as textit{bonus information}. Observability analysis using differential geometry shows that the proposed CRL scheme can expand the observable subspace compared to other alternatives using only direct distances between the host agent and its neighbors. In addition, we apply the kernel-induced extended Kalman filter (EKF) to the CRL state estimation problem with the novel-designed Logarithmic-Versoria (LV) kernel to tackle heavy-tailed UWB noise. Sufficient conditions for the convergence of the fixed-point iteration involved in the estimation algorithm are also derived. Comparative Monte Carlo simulations demonstrate that the proposed CRL scheme combined with the LV-kernel EKF significantly improves the estimation accuracy owing to its robustness against both measurement outliers and incorrect measurement covariance matrix initialization. Moreover, with the LV kernel, the estimation is still satisfactory when performing the fixed-point iteration only once for reduced computational complexity.
5/29/2024
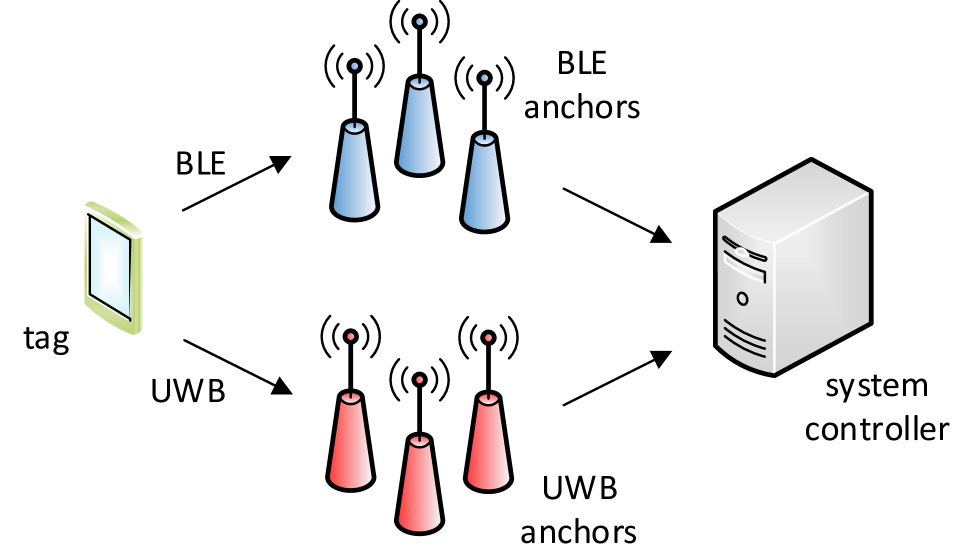
Kalman filter based localization in hybrid BLE-UWB positioning system
Marcin Kolakowski
0
0
In this paper a concept of hybrid Bluetooth Low Energy (BLE) Ultra-wideband (UWB) positioning system is presented. The system is intended to be energy efficient. Low energy BLE unit is used as a primary source of measurement data and for most of the time localization is calculated based on received signal strength (RSS). UWB technology is used less often. Time difference of arrival (TDOA) values measured with UWB radios are periodically used to improve RSS based localization. The paper contains a description of proposed hybrid positioning algorithm. Results of simulations and experiments confirming algorithm's efficiency are also included.
4/4/2024