VernaCopter: Disambiguated Natural-Language-Driven Robot via Formal Specifications

0

Sign in to get full access
Overview
- The paper proposes a system called "VernaCopter" that allows natural language-driven control of a robot in uncertain environments.
- It introduces formal specifications to disambiguate and interpret natural language commands, addressing language ambiguity.
- The system integrates user preferences and environmental constraints to generate robot actions that satisfy the user's intent.
Plain English Explanation
The VernaCopter: Disambiguated Natural-Language-Driven Robot via Formal Specifications paper presents a novel approach to controlling robots using natural language commands. Traditionally, programming robots to understand and execute specific instructions can be complex and time-consuming. The VernaCopter system aims to simplify this process by allowing users to provide natural language commands, similar to how they would give instructions to another person.
However, natural language can be ambiguous, with multiple possible interpretations. To address this, the researchers developed a system that uses formal specifications to disambiguate the user's intent and translate it into concrete robot actions. This means that the natural language commands are analyzed and converted into a set of precise, unambiguous instructions that the robot can then execute.
The system also takes into account the user's preferences and the constraints of the environment to ensure that the robot's actions align with the user's goals and are safe and feasible. For example, if the user asks the robot to "move the box to the corner," the system will interpret this command, consider factors like the robot's capabilities, the location of the box, and any obstacles in the way, and then generate a plan for the robot to carry out the task effectively.
By bridging the gap between natural language and robot control, the VernaCopter system aims to make it easier for non-technical users to interact with and control robots, even in uncertain or changing environments. This could have applications in areas like personal assistance, home automation, and collaborative robotics.
Technical Explanation
The VernaCopter system uses a combination of natural language processing, formal specifications, and robot control algorithms to enable natural language-driven robot control. The key components of the system include:
-
Natural Language Processing: The system uses natural language processing techniques to parse and understand the user's natural language commands, identifying the user's intent and relevant task-level information.
-
Formal Specifications: To address the ambiguity inherent in natural language, the system translates the user's commands into formal specifications - a precise, unambiguous representation of the desired robot behavior. These formal specifications encode the user's intent, environmental constraints, and robot capabilities.
-
Motion Planning and Control: Based on the formal specifications, the system generates plans and control commands for the robot to execute the user's intent while satisfying the environmental constraints and the user's preferences.
The researchers evaluated the VernaCopter system through a series of experiments in simulated and real-world environments, assessing its ability to accurately interpret natural language commands and generate appropriate robot actions. The results demonstrate the system's effectiveness in enabling natural language-driven robot control, even in complex and uncertain scenarios.
Critical Analysis
The VernaCopter paper presents a promising approach to addressing the challenge of natural language-driven robot control. By leveraging formal specifications to disambiguate user commands, the system aims to bridge the gap between human language and robot capabilities.
However, the paper also acknowledges several limitations and areas for further research. For instance, the system's performance may be sensitive to the quality and coverage of the natural language processing models, and it may struggle with highly context-dependent or nuanced commands. Additionally, the integration of user preferences and environmental constraints could become increasingly complex as the scale and complexity of the robot's tasks grow.
Further research could explore ways to enhance the system's robustness and adaptability, such as incorporating more advanced natural language understanding techniques or developing more flexible and generalizable formal specification frameworks. Exploring the potential of large language models and multi-modal reasoning could also be promising avenues for improving the system's capabilities.
Conclusion
The VernaCopter system presented in this paper represents an important step towards making robot control more accessible and intuitive for non-technical users. By bridging the gap between natural language and formal specifications, the system enables users to control robots using the same types of commands they would give to another person, while ensuring that the robot's actions align with the user's intent and the constraints of the environment.
As natural language-driven robotics continues to evolve, the insights and techniques developed in this paper could have far-reaching implications for the field, potentially paving the way for more widespread adoption of robots in a variety of applications, from personal assistance to industrial automation. By democratizing robot control through natural language interfaces, the VernaCopter system could help unlock the full potential of robotics and bring these technologies closer to the everyday lives of people.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
VernaCopter: Disambiguated Natural-Language-Driven Robot via Formal Specifications
Teun van de Laar, Zengjie Zhang, Shuhao Qi, Sofie Haesaert, Zhiyong Sun
It has been an ambition of many to control a robot for a complex task using natural language (NL). The rise of large language models (LLMs) makes it closer to coming true. However, an LLM-powered system still suffers from the ambiguity inherent in an NL and the uncertainty brought up by LLMs. This paper proposes a novel LLM-based robot motion planner, named textit{VernaCopter}, with signal temporal logic (STL) specifications serving as a bridge between NL commands and specific task objectives. The rigorous and abstract nature of formal specifications allows the planner to generate high-quality and highly consistent paths to guide the motion control of a robot. Compared to a conventional NL-prompting-based planner, the proposed VernaCopter planner is more stable and reliable due to less ambiguous uncertainty. Its efficacy and advantage have been validated by two small but challenging experimental scenarios, implying its potential in designing NL-driven robots.
Read more9/17/2024

0
LLM Granularity for On-the-Fly Robot Control
Peng Wang, Mattia Robbiani, Zhihao Guo
Assistive robots have attracted significant attention due to their potential to enhance the quality of life for vulnerable individuals like the elderly. The convergence of computer vision, large language models, and robotics has introduced the `visuolinguomotor' mode for assistive robots, where visuals and linguistics are incorporated into assistive robots to enable proactive and interactive assistance. This raises the question: textit{In circumstances where visuals become unreliable or unavailable, can we rely solely on language to control robots, i.e., the viability of the `linguomotor` mode for assistive robots?} This work takes the initial steps to answer this question by: 1) evaluating the responses of assistive robots to language prompts of varying granularities; and 2) exploring the necessity and feasibility of controlling the robot on-the-fly. We have designed and conducted experiments on a Sawyer cobot to support our arguments. A Turtlebot robot case is designed to demonstrate the adaptation of the solution to scenarios where assistive robots need to maneuver to assist. Codes will be released on GitHub soon to benefit the community.
Read more6/24/2024
0
Natural Language as Policies: Reasoning for Coordinate-Level Embodied Control with LLMs
Yusuke Mikami, Andrew Melnik, Jun Miura, Ville Hautamaki
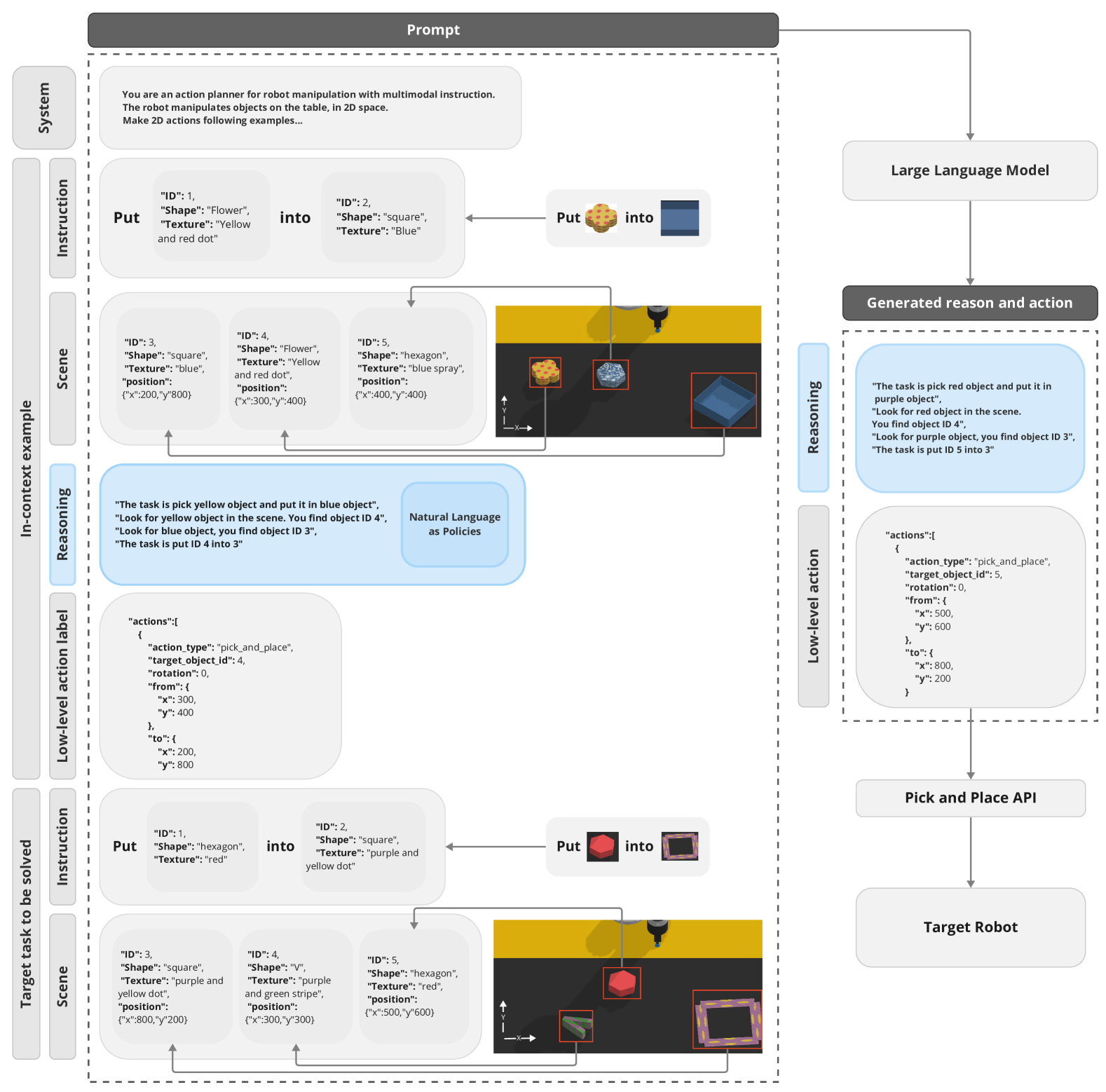
We demonstrate experimental results with LLMs that address robotics task planning problems. Recently, LLMs have been applied in robotics task planning, particularly using a code generation approach that converts complex high-level instructions into mid-level policy codes. In contrast, our approach acquires text descriptions of the task and scene objects, then formulates task planning through natural language reasoning, and outputs coordinate level control commands, thus reducing the necessity for intermediate representation code as policies with pre-defined APIs. Our approach is evaluated on a multi-modal prompt simulation benchmark, demonstrating that our prompt engineering experiments with natural language reasoning significantly enhance success rates compared to its absence. Furthermore, our approach illustrates the potential for natural language descriptions to transfer robotics skills from known tasks to previously unseen tasks. The project website: https://natural-language-as-policies.github.io/
Read more4/9/2024
💬
0
Integrating Disambiguation and User Preferences into Large Language Models for Robot Motion Planning
Mohammed Abugurain, Shinkyu Park
This paper presents a framework that can interpret humans' navigation commands containing temporal elements and directly translate their natural language instructions into robot motion planning. Central to our framework is utilizing Large Language Models (LLMs). To enhance the reliability of LLMs in the framework and improve user experience, we propose methods to resolve the ambiguity in natural language instructions and capture user preferences. The process begins with an ambiguity classifier, identifying potential uncertainties in the instructions. Ambiguous statements trigger a GPT-4-based mechanism that generates clarifying questions, incorporating user responses for disambiguation. Also, the framework assesses and records user preferences for non-ambiguous instructions, enhancing future interactions. The last part of this process is the translation of disambiguated instructions into a robot motion plan using Linear Temporal Logic. This paper details the development of this framework and the evaluation of its performance in various test scenarios.
Read more4/24/2024