LLM Granularity for On-the-Fly Robot Control

0

Sign in to get full access
Overview
- This research paper explores the use of large language models (LLMs) for on-the-fly robot control, which involves enabling robots to understand and execute instructions in real-time.
- The key idea is to leverage the natural language understanding capabilities of LLMs to allow robots to respond dynamically to verbal commands or textual instructions, rather than relying on pre-programmed actions.
- The paper investigates the appropriate level of granularity (or detail) for the LLM to operate at, balancing the need for flexibility and adaptability with the requirement for reliable and safe robot behavior.
Plain English Explanation
The researchers in this paper are looking at how to use advanced language models, known as large language models (LLMs), to help robots understand and follow instructions in real-time. Typically, robots are programmed to perform specific, pre-defined actions. But the researchers want to give robots more flexibility by allowing them to respond to verbal commands or written instructions in the moment.
The key challenge is finding the right level of detail or "granularity" for the language model to operate at. If the model is too high-level, it might not be able to provide the robot with enough specific guidance to carry out the task safely and reliably. But if the model is too low-level, it could become overwhelming and difficult for the robot to process all the information quickly enough.
The goal is to strike a balance, where the robot can understand the overall intent of the instruction, but also have enough granular detail to execute the steps accurately. This would allow the robot to be more adaptable and responsive, while still maintaining the necessary level of control and predictability.
By exploring this idea of LLM granularity for robot control, the researchers hope to enable a new generation of robots that can fluidly interact with humans using natural language, rather than being constrained to pre-programmed behaviors. This could open up exciting possibilities for robots to assist people in more dynamic, real-world settings.
Technical Explanation
The paper examines the appropriate level of granularity for large language models (LLMs) to enable effective on-the-fly control of robots. LLMs have shown impressive natural language understanding capabilities, suggesting they could be leveraged to allow robots to respond dynamically to verbal commands or textual instructions, rather than relying solely on pre-programmed actions.
The key challenge lies in determining the optimal granularity - or level of detail - for the LLM to operate at. If the model is too high-level, it may not provide the robot with sufficient specific guidance to carry out tasks safely and reliably. Conversely, if the model is too low-level, it could overwhelm the robot with an excessive amount of granular information, making it difficult for the robot to process and execute the instructions in real-time.
The researchers explore this balance, investigating how to leverage the flexibility and adaptability of LLMs while ensuring the robot maintains the necessary level of control and predictability. They examine different approaches to integrating LLMs with robot control systems, considering factors such as the representation of instructions, the mapping between language and robot actions, and the handling of uncertainty and ambiguity.
Through their analysis, the researchers aim to provide insights and guidelines for designing LLM-based robot control systems that can fluidly interact with humans using natural language, opening up new possibilities for robots to assist people in dynamic, real-world settings. The findings from this work could have important implications for the ongoing efforts to integrate large language models into intelligent robots and enable robots to follow abstract instructions.
Critical Analysis
The paper presents a thoughtful exploration of the challenges and opportunities in leveraging large language models (LLMs) for on-the-fly robot control. The researchers acknowledge the inherent tension between the flexibility and adaptability that LLMs can provide, and the need for robots to maintain a reliable and safe level of performance.
One potential limitation of the research is the lack of extensive empirical evaluation. While the paper discusses different approaches and considerations, it does not delve into the detailed implementation and testing of these methods. Readers may be left wanting more concrete evidence of the feasibility and effectiveness of the proposed solutions.
Additionally, the paper does not address some of the broader concerns around the use of LLMs for safety-critical applications, such as the potential for unpredictable or biased behavior, the challenges of maintaining transparency and interpretability, and the need for robust testing and validation procedures. These are important considerations that could be further explored in future research.
Nevertheless, the paper's focus on the critical issue of LLM granularity for robot control is a valuable contribution to the ongoing efforts to integrate large language models with intelligent robots and enable robots to follow abstract instructions. The insights and guidelines provided in the paper could inform the development of more advanced and versatile robot control systems that can leverage the power of natural language understanding.
Conclusion
This research paper explores the use of large language models (LLMs) for on-the-fly robot control, a promising approach that could enable robots to understand and execute instructions in real-time using natural language. The key challenge lies in determining the appropriate level of granularity, or detail, for the LLM to operate at, balancing the need for flexibility and adaptability with the requirement for reliable and safe robot behavior.
The findings from this work could have important implications for the ongoing efforts to integrate large language models into intelligent robots and enable robots to follow abstract instructions. By addressing the critical issue of LLM granularity for robot control, the researchers aim to pave the way for a new generation of robots that can fluidly interact with humans using natural language, opening up exciting possibilities for robots to assist people in more dynamic, real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LLM Granularity for On-the-Fly Robot Control
Peng Wang, Mattia Robbiani, Zhihao Guo
Assistive robots have attracted significant attention due to their potential to enhance the quality of life for vulnerable individuals like the elderly. The convergence of computer vision, large language models, and robotics has introduced the `visuolinguomotor' mode for assistive robots, where visuals and linguistics are incorporated into assistive robots to enable proactive and interactive assistance. This raises the question: textit{In circumstances where visuals become unreliable or unavailable, can we rely solely on language to control robots, i.e., the viability of the `linguomotor` mode for assistive robots?} This work takes the initial steps to answer this question by: 1) evaluating the responses of assistive robots to language prompts of varying granularities; and 2) exploring the necessity and feasibility of controlling the robot on-the-fly. We have designed and conducted experiments on a Sawyer cobot to support our arguments. A Turtlebot robot case is designed to demonstrate the adaptation of the solution to scenarios where assistive robots need to maneuver to assist. Codes will be released on GitHub soon to benefit the community.
Read more6/24/2024
0
Towards Natural Language-Driven Assembly Using Foundation Models
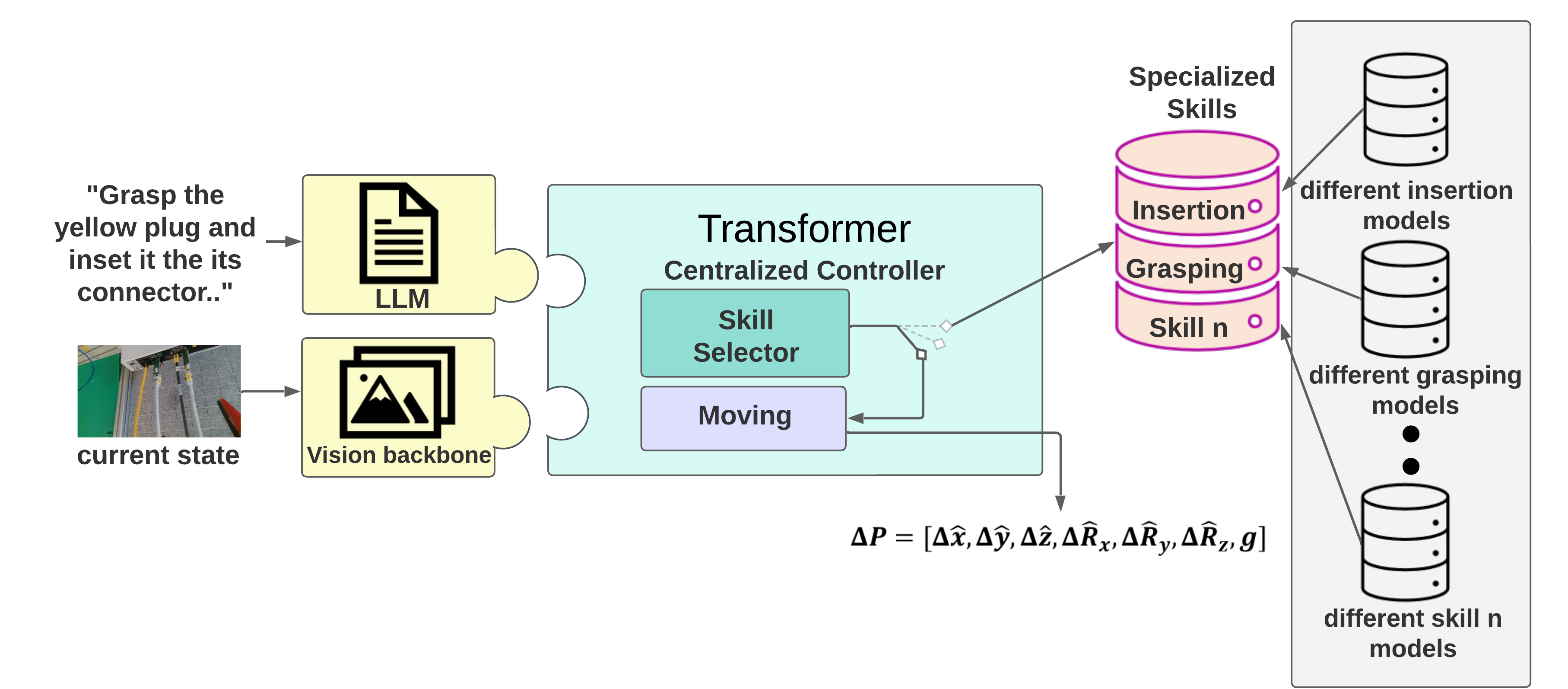
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
Read more6/26/2024
0
A Survey of Language-Based Communication in Robotics
William Hunt, Sarvapali D. Ramchurn, Mohammad D. Soorati
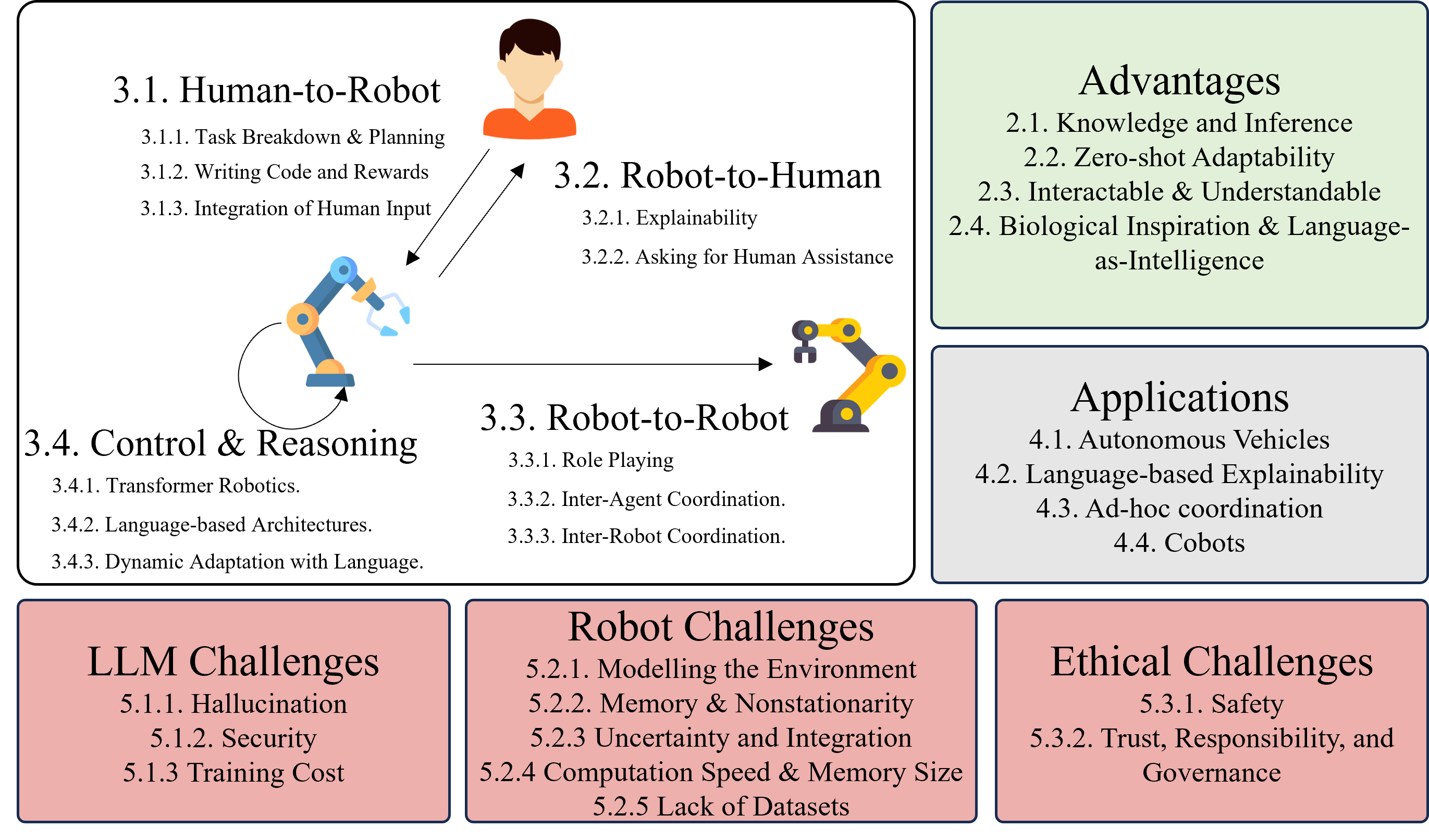
Embodied robots which can interact with their environment and neighbours are increasingly being used as a test case to develop Artificial Intelligence. This creates a need for multimodal robot controllers that can operate across different types of information, including text. Large Language Models are able to process and generate textual as well as audiovisual data and, more recently, robot actions. Language Models are increasingly being applied to robotic systems; these Language-Based robots leverage the power of language models in a variety of ways. Additionally, the use of language opens up multiple forms of information exchange between members of a human-robot team. This survey motivates the use of language models in robotics, and then delineates works based on the part of the overall control flow in which language is incorporated. Language can be used by human to task a robot, by a robot to inform a human, between robots as a human-like communication medium, and internally for a robot's planning and control. Applications of language-based robots are explored, and numerous limitations and challenges are discussed to provide a summary of the development needed for the future of language-based robotics.
Read more9/17/2024
0
VoicePilot: Harnessing LLMs as Speech Interfaces for Physically Assistive Robots
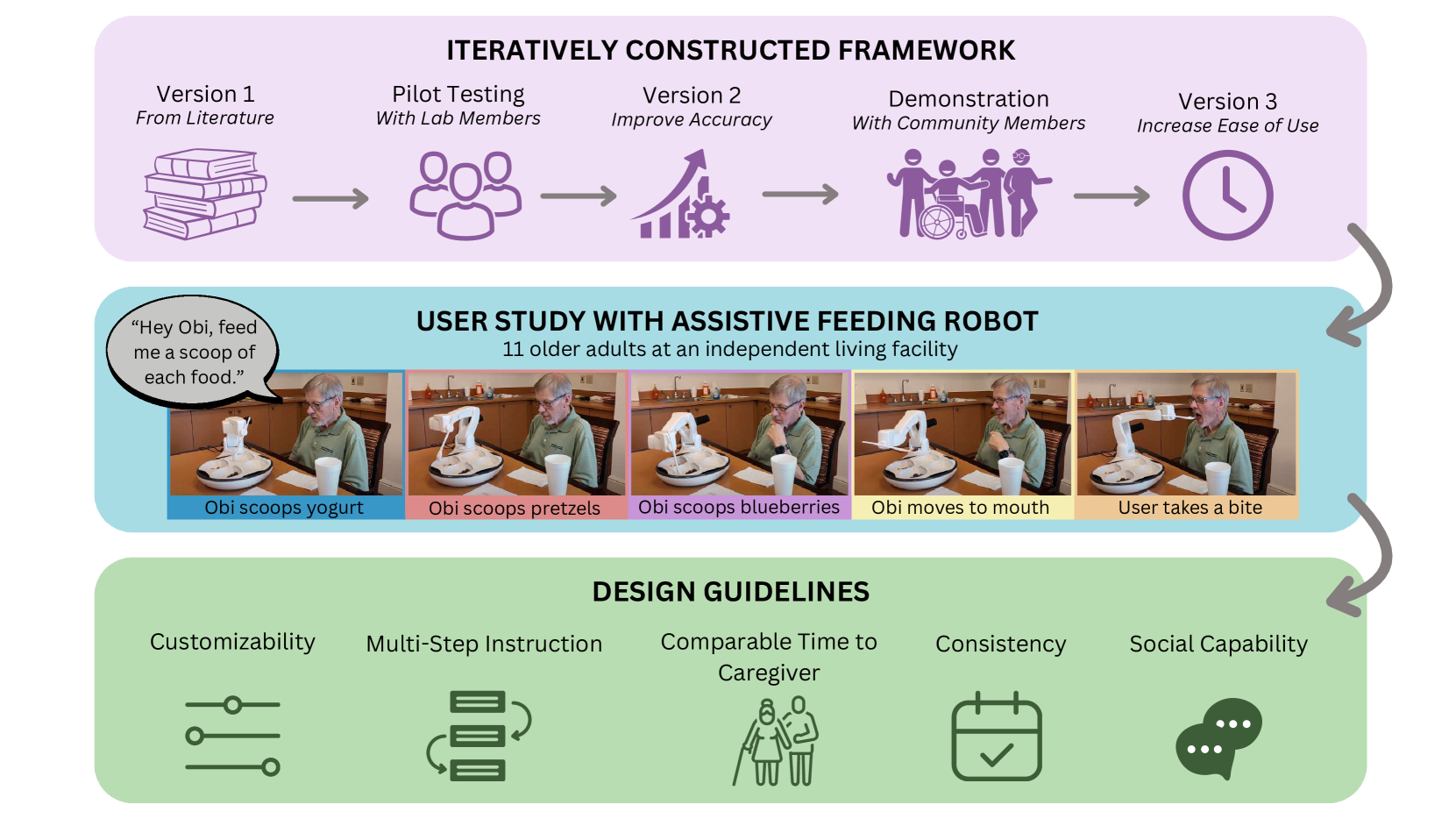
Akhil Padmanabha, Jessie Yuan, Janavi Gupta, Zulekha Karachiwalla, Carmel Majidi, Henny Admoni, Zackory Erickson
Physically assistive robots present an opportunity to significantly increase the well-being and independence of individuals with motor impairments or other forms of disability who are unable to complete activities of daily living. Speech interfaces, especially ones that utilize Large Language Models (LLMs), can enable individuals to effectively and naturally communicate high-level commands and nuanced preferences to robots. Frameworks for integrating LLMs as interfaces to robots for high level task planning and code generation have been proposed, but fail to incorporate human-centric considerations which are essential while developing assistive interfaces. In this work, we present a framework for incorporating LLMs as speech interfaces for physically assistive robots, constructed iteratively with 3 stages of testing involving a feeding robot, culminating in an evaluation with 11 older adults at an independent living facility. We use both quantitative and qualitative data from the final study to validate our framework and additionally provide design guidelines for using LLMs as speech interfaces for assistive robots. Videos and supporting files are located on our project website: https://sites.google.com/andrew.cmu.edu/voicepilot/
Read more7/18/2024