Natural Language as Policies: Reasoning for Coordinate-Level Embodied Control with LLMs
2403.13801
0
0
Abstract
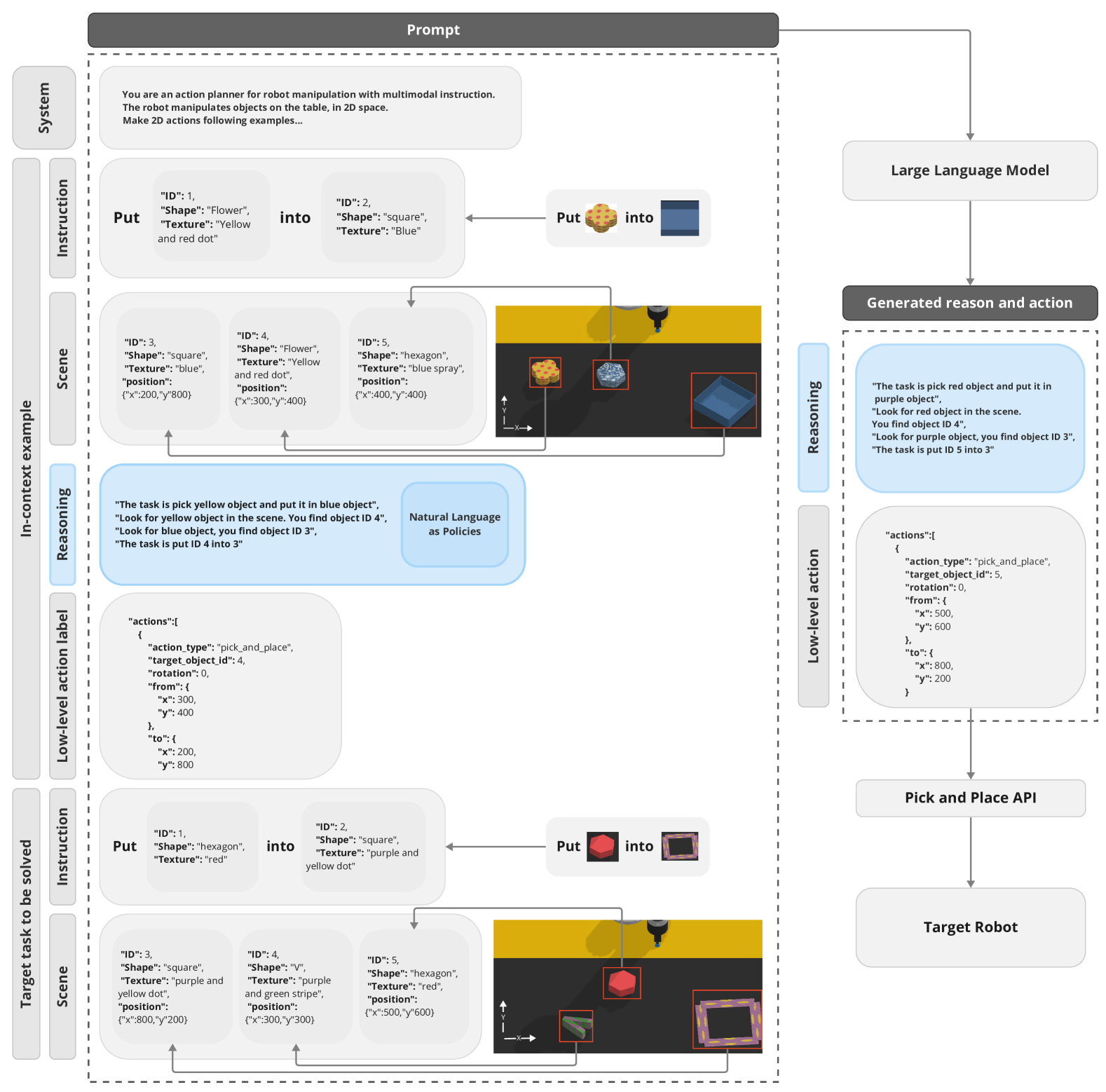
We demonstrate experimental results with LLMs that address robotics task planning problems. Recently, LLMs have been applied in robotics task planning, particularly using a code generation approach that converts complex high-level instructions into mid-level policy codes. In contrast, our approach acquires text descriptions of the task and scene objects, then formulates task planning through natural language reasoning, and outputs coordinate level control commands, thus reducing the necessity for intermediate representation code as policies with pre-defined APIs. Our approach is evaluated on a multi-modal prompt simulation benchmark, demonstrating that our prompt engineering experiments with natural language reasoning significantly enhance success rates compared to its absence. Furthermore, our approach illustrates the potential for natural language descriptions to transfer robotics skills from known tasks to previously unseen tasks. The project website: https://natural-language-as-policies.github.io/
Create account to get full access
Overview
- This paper explores the use of Large Language Models (LLMs) for coordinate-level embodied control, where natural language is used as a policy for controlling physical systems.
- The researchers investigate the reasoning capabilities of LLMs and their potential for reasoning in physical environments.
- The paper also examines how LLMs can be used to coordinate multi-agent systems and control robotic systems through natural language.
Plain English Explanation
The paper explores the idea of using large language models (LLMs), such as GPT-3, to control physical systems and robots using natural language instructions. Instead of programming robots with detailed control algorithms, the researchers investigate whether LLMs can understand and execute high-level commands expressed in plain language.
For example, imagine you want to control a robot arm to pick up an object and place it somewhere else. Instead of writing complex software to control the individual joints and movements of the arm, you could simply tell the robot "Pick up the red ball and put it on the table." The LLM would then try to understand the meaning of the command and translate it into the low-level actions needed to control the robot's movements.
This approach has several potential benefits. It could make it easier for non-experts to control robotic systems, as they wouldn't need to learn complex programming languages or control algorithms. It could also allow for more flexible and adaptable control, as the LLM could potentially understand and respond to a wide range of natural language instructions.
The paper examines the reasoning capabilities of LLMs in physical environments, exploring their ability to coordinate multi-agent systems and control complex robotic systems through natural language. This could have important implications for long-horizon locomotion and manipulation tasks in robotics, as well as for developing speech interfaces for controlling physical systems.
Technical Explanation
The paper presents a framework for using LLMs as policies for coordinate-level embodied control, where natural language instructions are used to control physical systems. The researchers trained LLMs on a large corpus of text data and then fine-tuned them on a task-specific dataset to understand and execute natural language commands for controlling simulated robots and physical systems.
The key elements of the paper include:
-
Experiment Design: The researchers evaluated the LLMs' performance on a range of tasks, including object manipulation, multi-agent coordination, and long-horizon control of quadrupedal robots. They compared the LLM-based approach to traditional control algorithms and assessed factors such as task completion, efficiency, and robustness.
-
Architecture: The paper describes the architecture of the LLM-based control system, which involves translating natural language instructions into a structured representation that can be used to generate low-level control signals for the physical system.
-
Insights: The researchers found that LLMs were able to effectively understand and execute natural language commands, demonstrating strong reasoning capabilities in physical environments. They also observed that the LLM-based approach was able to generalize to novel situations and outperform traditional control algorithms in certain tasks.
Critical Analysis
The paper provides a compelling proof-of-concept for using LLMs as a flexible and adaptable control mechanism for physical systems. However, the researchers also acknowledge several limitations and areas for further research:
-
Scalability: While the LLM-based approach showed promising results in the specific tasks evaluated, it's unclear how well it would scale to more complex or open-ended scenarios. Ensuring the robustness and reliability of the system as the complexity increases is an important challenge.
-
Safety and Reliability: The paper does not address potential safety and reliability concerns associated with using LLMs for critical control tasks. Ensuring the system's robustness to errors, unexpected situations, and adversarial inputs is a crucial consideration for real-world applications.
-
Interpretability: The internal workings of LLMs can be opaque, making it difficult to understand and verify the reasoning behind their decisions. Developing more interpretable and explainable control systems could be an important area for future research.
-
Hardware Integration: The paper focuses on simulated environments and does not address the practical challenges of integrating LLM-based control systems with physical hardware, such as sensor integration, low-level control, and real-time performance requirements.
Overall, the research presented in this paper offers a promising direction for the use of LLMs in embodied control, but there are still significant challenges to overcome before this approach can be widely adopted for real-world applications.
Conclusion
This paper explores the use of Large Language Models (LLMs) for coordinate-level embodied control, where natural language is used as a policy for controlling physical systems. The researchers demonstrate the reasoning capabilities of LLMs in physical environments, highlighting their potential for coordinating multi-agent systems and controlling complex robotic systems through natural language instructions.
The findings suggest that this approach could simplify the control of physical systems, making it more accessible to non-experts and potentially enabling more flexible and adaptable control. However, the paper also identifies several challenges, such as scalability, safety, reliability, and hardware integration, that will need to be addressed before this technology can be widely deployed.
Overall, the research presented in this paper represents an important step towards the integration of large language models with physical systems, with potential implications for long-horizon locomotion and manipulation tasks as well as the development of speech interfaces for controlling physical systems. As the field of embodied AI continues to evolve, this work highlights the promise and challenges of using LLMs as a transformative control mechanism for the physical world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
Formal-LLM: Integrating Formal Language and Natural Language for Controllable LLM-based Agents
Zelong Li, Wenyue Hua, Hao Wang, He Zhu, Yongfeng Zhang
0
0
Recent advancements on Large Language Models (LLMs) enable AI Agents to automatically generate and execute multi-step plans to solve complex tasks. However, since LLM's content generation process is hardly controllable, current LLM-based agents frequently generate invalid or non-executable plans, which jeopardizes the performance of the generated plans and corrupts users' trust in LLM-based agents. In response, this paper proposes a novel ``Formal-LLM'' framework for LLM-based agents by integrating the expressiveness of natural language and the precision of formal language. Specifically, the framework allows human users to express their requirements or constraints for the planning process as an automaton. A stack-based LLM plan generation process is then conducted under the supervision of the automaton to ensure that the generated plan satisfies the constraints, making the planning process controllable. We conduct experiments on both benchmark tasks and practical real-life tasks, and our framework achieves over 50% overall performance increase, which validates the feasibility and effectiveness of employing Formal-LLM to guide the plan generation of agents, preventing the agents from generating invalid and unsuccessful plans. Further, more controllable LLM-based agents can facilitate the broader utilization of LLM in application scenarios where high validity of planning is essential. The work is open-sourced at https://github.com/agiresearch/Formal-LLM.
6/19/2024
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
0
0
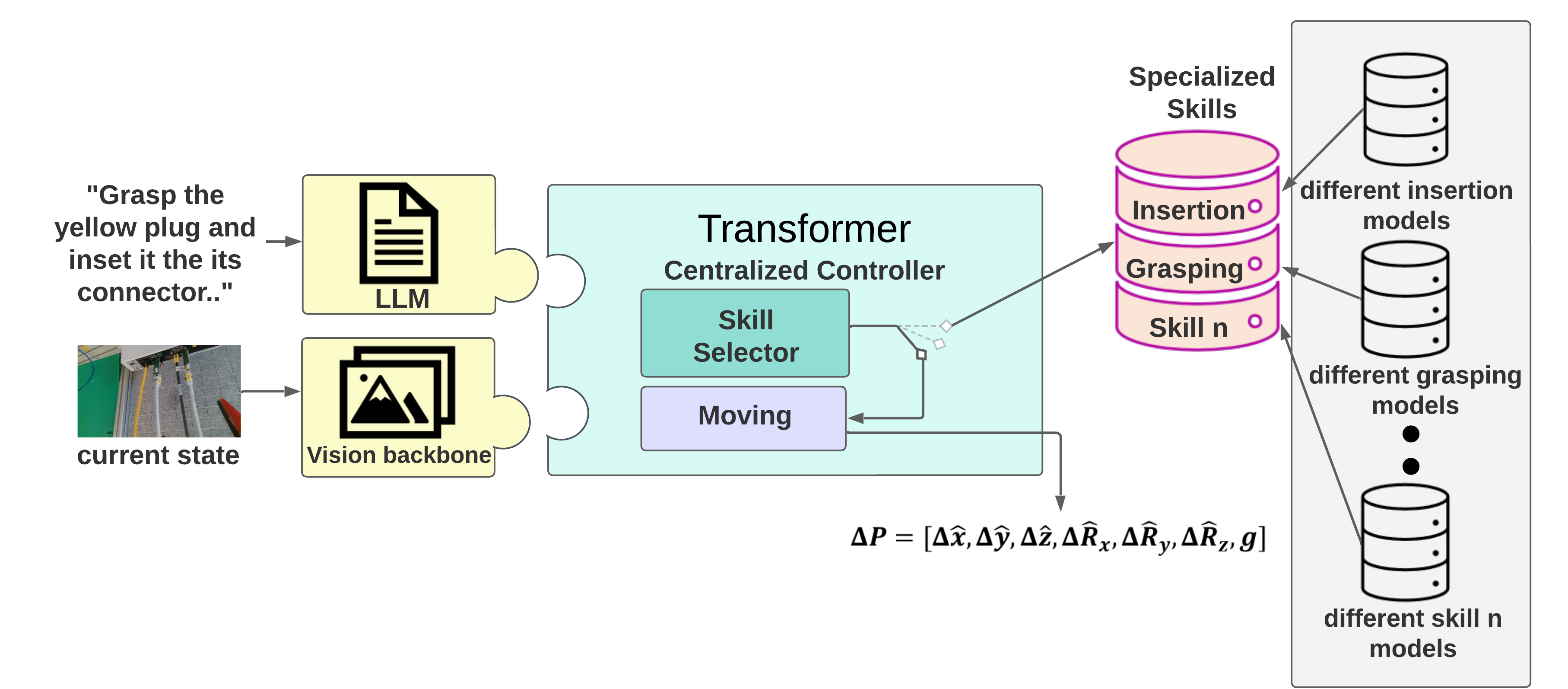
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
6/26/2024
💬
Large Language Models as Generalizable Policies for Embodied Tasks
Andrew Szot, Max Schwarzer, Harsh Agrawal, Bogdan Mazoure, Walter Talbott, Katherine Metcalf, Natalie Mackraz, Devon Hjelm, Alexander Toshev
0
0
We show that large language models (LLMs) can be adapted to be generalizable policies for embodied visual tasks. Our approach, called Large LAnguage model Reinforcement Learning Policy (LLaRP), adapts a pre-trained frozen LLM to take as input text instructions and visual egocentric observations and output actions directly in the environment. Using reinforcement learning, we train LLaRP to see and act solely through environmental interactions. We show that LLaRP is robust to complex paraphrasings of task instructions and can generalize to new tasks that require novel optimal behavior. In particular, on 1,000 unseen tasks it achieves 42% success rate, 1.7x the success rate of other common learned baselines or zero-shot applications of LLMs. Finally, to aid the community in studying language conditioned, massively multi-task, embodied AI problems we release a novel benchmark, Language Rearrangement, consisting of 150,000 training and 1,000 testing tasks for language-conditioned rearrangement. Video examples of LLaRP in unseen Language Rearrangement instructions are at https://llm-rl.github.io.
4/17/2024
Can only LLMs do Reasoning?: Potential of Small Language Models in Task Planning
Gawon Choi, Hyemin Ahn
0
0
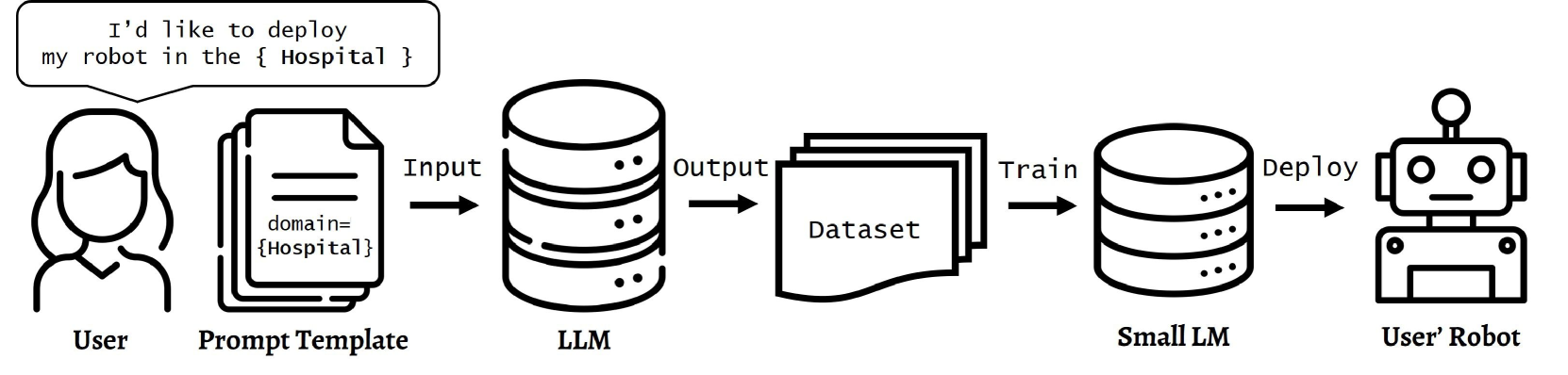
In robotics, the use of Large Language Models (LLMs) is becoming prevalent, especially for understanding human commands. In particular, LLMs are utilized as domain-agnostic task planners for high-level human commands. LLMs are capable of Chain-of-Thought (CoT) reasoning, and this allows LLMs to be task planners. However, we need to consider that modern robots still struggle to perform complex actions, and the domains where robots can be deployed are limited in practice. This leads us to pose a question: If small LMs can be trained to reason in chains within a single domain, would even small LMs be good task planners for the robots? To train smaller LMs to reason in chains, we build `COmmand-STeps datasets' (COST) consisting of high-level commands along with corresponding actionable low-level steps, via LLMs. We release not only our datasets but also the prompt templates used to generate them, to allow anyone to build datasets for their domain. We compare GPT3.5 and GPT4 with the finetuned GPT2 for task domains, in tabletop and kitchen environments, and the result shows that GPT2-medium is comparable to GPT3.5 for task planning in a specific domain. Our dataset, code, and more output samples can be found in https://github.com/Gawon-Choi/small-LMs-Task-Planning
4/8/2024