VIPeR: Visual Incremental Place Recognition with Adaptive Mining and Lifelong Learning

0

Sign in to get full access
Overview
- The paper presents VIPeR, a visual incremental place recognition system with adaptive mining and lifelong learning.
- VIPeR aims to enable robots to continuously learn and update their place recognition models as they explore new environments.
- The key innovations include an adaptive mining strategy to select informative training samples and a lifelong learning framework to continuously update the model.
Plain English Explanation
VIPeR: Visual Incremental Place Recognition with Adaptive Mining and Lifelong Learning describes a system that helps robots recognize places they've seen before, even as they explore new environments. The core idea is to have the robot continuously update its place recognition model, rather than relying on a fixed model.
The researchers developed two key techniques to enable this:
-
Adaptive Mining: The system selectively chooses the most informative training samples to update the model, rather than using all available data. This makes the learning process more efficient.
-
Lifelong Learning: The model is continuously updated as the robot encounters new places, allowing it to adapt and improve over time. This is in contrast to a static model that can become outdated.
By combining these techniques, the VIPeR system can help robots navigate and recognize places more effectively, especially as they explore new and changing environments. This could be useful for applications like autonomous navigation, where the ability to recognize familiar locations is crucial.
Technical Explanation
VIPeR: Visual Incremental Place Recognition with Adaptive Mining and Lifelong Learning proposes an approach for visual place recognition that can continuously learn and update its models as a robot explores new environments.
The key innovations are:
-
Adaptive Mining: The system selectively chooses the most informative training samples to update the model, rather than using all available data. This is accomplished through a mining strategy that considers the novelty and diversity of the samples.
-
Lifelong Learning: The model is continuously updated as the robot encounters new places, allowing it to adapt and improve over time. This is achieved through a rehearsal-based learning framework that maintains a memory buffer of past experiences.
The researchers evaluate VIPeR on several benchmark datasets for visual place recognition, demonstrating improvements in accuracy and robustness compared to previous methods. The adaptive mining strategy helps the system focus on the most relevant training data, while the lifelong learning framework enables continuous model updates.
Critical Analysis
The paper presents a compelling approach to visual place recognition that addresses the challenge of learning in dynamic environments. The adaptive mining and lifelong learning techniques seem well-designed and the experimental results are promising.
However, the paper does not discuss potential limitations or caveats of the VIPeR system. For example, it's unclear how the system would perform in environments with significant changes, such as major construction or renovation projects. The memory buffer used for rehearsal-based learning may also have scalability issues as the robot explores more locations.
Additionally, the paper does not explore the computational and memory requirements of the VIPeR system, which could be an important consideration for real-world deployment on resource-constrained robotic platforms.
Further research could investigate the robustness of VIPeR to more extreme environmental changes, as well as ways to optimize its resource usage for efficient on-device implementation.
Conclusion
VIPeR: Visual Incremental Place Recognition with Adaptive Mining and Lifelong Learning presents an innovative approach to visual place recognition that enables continuous learning and adaptation. By combining adaptive mining and lifelong learning techniques, the system can continuously update its place recognition models as a robot explores new environments.
This work has the potential to significantly improve the navigation and localization capabilities of autonomous robots, especially in dynamic environments that change over time. The adaptive and incremental nature of the VIPeR system could make it a valuable tool for a wide range of robotic applications, from self-driving cars to assistive robots.
While the paper does not address all the potential limitations of the approach, the core ideas and experimental results suggest that VIPeR is a promising step forward in the field of visual place recognition. Further research and development in this area could lead to even more robust and flexible systems for robot navigation and scene understanding.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
VIPeR: Visual Incremental Place Recognition with Adaptive Mining and Lifelong Learning
Yuhang Ming, Minyang Xu, Xingrui Yang, Weicai Ye, Weihan Wang, Yong Peng, Weichen Dai, Wanzeng Kong
Visual place recognition (VPR) is an essential component of many autonomous and augmented/virtual reality systems. It enables the systems to robustly localize themselves in large-scale environments. Existing VPR methods demonstrate attractive performance at the cost of heavy pre-training and limited generalizability. When deployed in unseen environments, these methods exhibit significant performance drops. Targeting this issue, we present VIPeR, a novel approach for visual incremental place recognition with the ability to adapt to new environments while retaining the performance of previous environments. We first introduce an adaptive mining strategy that balances the performance within a single environment and the generalizability across multiple environments. Then, to prevent catastrophic forgetting in lifelong learning, we draw inspiration from human memory systems and design a novel memory bank for our VIPeR. Our memory bank contains a sensory memory, a working memory and a long-term memory, with the first two focusing on the current environment and the last one for all previously visited environments. Additionally, we propose a probabilistic knowledge distillation to explicitly safeguard the previously learned knowledge. We evaluate our proposed VIPeR on three large-scale datasets, namely Oxford Robotcar, Nordland, and TartanAir. For comparison, we first set a baseline performance with naive finetuning. Then, several more recent lifelong learning methods are compared. Our VIPeR achieves better performance in almost all aspects with the biggest improvement of 13.65% in average performance.
Read more8/1/2024
0
Improving Visual Place Recognition Based Robot Navigation Through Verification of Localization Estimates
Owen Claxton, Connor Malone, Helen Carson, Jason Ford, Gabe Bolton, Iman Shames, Michael Milford
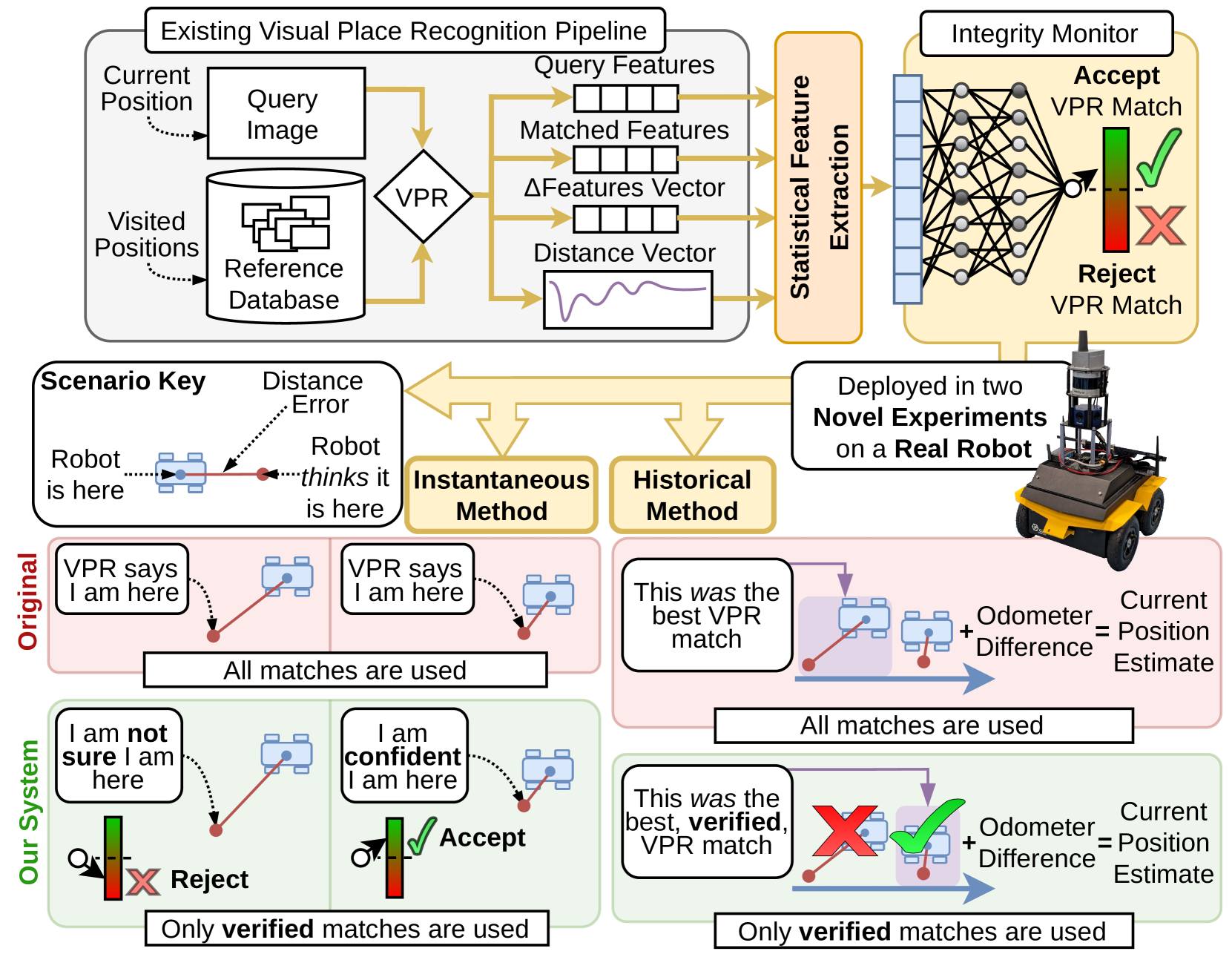
Visual Place Recognition (VPR) systems often have imperfect performance, which affects robot navigation decisions. This research introduces a novel Multi-Layer Perceptron (MLP) integrity monitor for VPR which demonstrates improved performance and generalizability over the previous state-of-the-art SVM approach, removing per-environment training and reducing manual tuning requirements. We test our proposed system in extensive real-world experiments, where we also present two real-time integrity-based VPR verification methods: an instantaneous rejection method for a robot navigating to a goal zone (Experiment 1); and a historical method that takes a best, verified, match from its recent trajectory and uses an odometer to extrapolate forwards to a current position estimate (Experiment 2). Noteworthy results for Experiment 1 include a decrease in aggregate mean along-track goal error from ~9.8m to ~3.1m in missions the robot pursued to completion, and an increase in the aggregate rate of successful mission completion from ~41% to ~55%. Experiment 2 showed a decrease in aggregate mean along-track localization error from ~2.0m to ~0.5m, and an increase in the aggregate precision of localization attempts from ~97% to ~99%. Overall, our results demonstrate the practical usefulness of a VPR integrity monitor in real-world robotics to improve VPR localization and consequent navigation performance.
Read more7/12/2024

0
Register assisted aggregation for Visual Place Recognition
Xuan Yu, Zhenyong Fu
Visual Place Recognition (VPR) refers to the process of using computer vision to recognize the position of the current query image. Due to the significant changes in appearance caused by season, lighting, and time spans between query images and database images for retrieval, these differences increase the difficulty of place recognition. Previous methods often discarded useless features (such as sky, road, vehicles) while uncontrolled discarding features that help improve recognition accuracy (such as buildings, trees). To preserve these useful features, we propose a new feature aggregation method to address this issue. Specifically, in order to obtain global and local features that contain discriminative place information, we added some registers on top of the original image tokens to assist in model training. After reallocating attention weights, these registers were discarded. The experimental results show that these registers surprisingly separate unstable features from the original image representation and outperform state-of-the-art methods.
Read more5/21/2024

0
Structured Pruning for Efficient Visual Place Recognition
Oliver Grainge, Michael Milford, Indu Bodala, Sarvapali D. Ramchurn, Shoaib Ehsan
Visual Place Recognition (VPR) is fundamental for the global re-localization of robots and devices, enabling them to recognize previously visited locations based on visual inputs. This capability is crucial for maintaining accurate mapping and localization over large areas. Given that VPR methods need to operate in real-time on embedded systems, it is critical to optimize these systems for minimal resource consumption. While the most efficient VPR approaches employ standard convolutional backbones with fixed descriptor dimensions, these often lead to redundancy in the embedding space as well as in the network architecture. Our work introduces a novel structured pruning method, to not only streamline common VPR architectures but also to strategically remove redundancies within the feature embedding space. This dual focus significantly enhances the efficiency of the system, reducing both map and model memory requirements and decreasing feature extraction and retrieval latencies. Our approach has reduced memory usage and latency by 21% and 16%, respectively, across models, while minimally impacting recall@1 accuracy by less than 1%. This significant improvement enhances real-time applications on edge devices with negligible accuracy loss.
Read more9/14/2024