Improving Visual Place Recognition Based Robot Navigation Through Verification of Localization Estimates

0
Sign in to get full access
Overview
- This paper presents a method to improve visual place recognition (VPR) based robot navigation by verifying the accuracy of localization estimates.
- The proposed approach combines VPR with a technique to validate the estimated location, improving the overall reliability of robot navigation.
- The authors evaluate their method on a dataset of aerial imagery and show improved performance compared to standalone VPR.
Plain English Explanation
Visual place recognition (VPR) is a key technology for robot navigation, allowing robots to identify their location by matching camera images to a map. However, VPR can sometimes make mistakes, leading the robot to believe it is in the wrong place.
This paper introduces a way to double-check the robot's estimated location. The system first uses VPR to guess where the robot is. It then has an additional step to verify whether that guess is actually correct. If the verification step finds an issue, the system can re-evaluate the robot's location and get a more reliable estimate.
The authors test this approach using aerial imagery, which can be challenging for VPR since the viewpoint from the air is quite different from ground-level camera images. By combining VPR with the additional verification step, the system is able to navigate more accurately through this aerial environment compared to using VPR alone.
The key innovation is adding this verification step to improve the overall reliability of the robot's location estimates. This can help make robot navigation systems more robust and trustworthy, which is important for real-world applications like self-driving cars or search-and-rescue robots.
Technical Explanation
The paper proposes a method to improve visual place recognition (VPR) for robot navigation by incorporating a step to verify the estimated location. The approach consists of two main components:
-
Visual Place Recognition: The system first uses a VPR algorithm to match the robot's camera images to a database of reference images, providing an initial estimate of the robot's location.
-
Localization Verification: The system then employs an additional verification step to assess the accuracy of the VPR-based localization estimate. This verification leverages complementary information, such as the robot's odometry or other sensors, to either confirm or reject the initial VPR-based location guess.
By combining VPR with this localization verification, the system can more reliably determine the robot's true location, even in challenging environments like aerial imagery where VPR alone may be prone to errors.
The authors evaluate their approach on a dataset of aerial images and show that the combined VPR and verification system outperforms standalone VPR, particularly in terms of reducing false positive location estimates. This improved reliability can enhance the overall performance of robot navigation systems, making them more suitable for real-world applications.
Critical Analysis
The key strength of this research is the addition of the localization verification step to improve the robustness of VPR-based robot navigation. By incorporating complementary information beyond just the visual place recognition, the system can better distinguish accurate location estimates from erroneous ones.
However, the paper does not provide much detail on the specific verification techniques used, nor does it explore how the method might perform in other environments or with different types of robots and sensors. Additionally, the computational cost and time requirements of the verification step are not addressed, which could be an important practical consideration for real-world deployment.
Further research could investigate alternative verification approaches, evaluate the method's generalizability to different scenarios, and assess the trade-offs between the benefits of improved reliability and the computational overhead of the verification process. Comparing the performance to other state-of-the-art techniques for improving VPR, such as register-assisted aggregation, dynamically modulating sequence length, or collaborative VPR through federated learning, could also provide valuable insights.
Conclusion
This paper presents a novel approach to enhance visual place recognition-based robot navigation by incorporating a localization verification step. The key innovation is the addition of this complementary verification process, which can help distinguish accurate VPR-based location estimates from erroneous ones, particularly in challenging environments like aerial imagery.
The improved reliability offered by this combined VPR and verification system can have significant implications for the real-world deployment of robot navigation applications, such as self-driving cars, search-and-rescue operations, and autonomous mapping. Further research to explore the practical trade-offs and generalizability of this approach could lead to even more robust and trustworthy robot navigation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Improving Visual Place Recognition Based Robot Navigation Through Verification of Localization Estimates
Owen Claxton, Connor Malone, Helen Carson, Jason Ford, Gabe Bolton, Iman Shames, Michael Milford
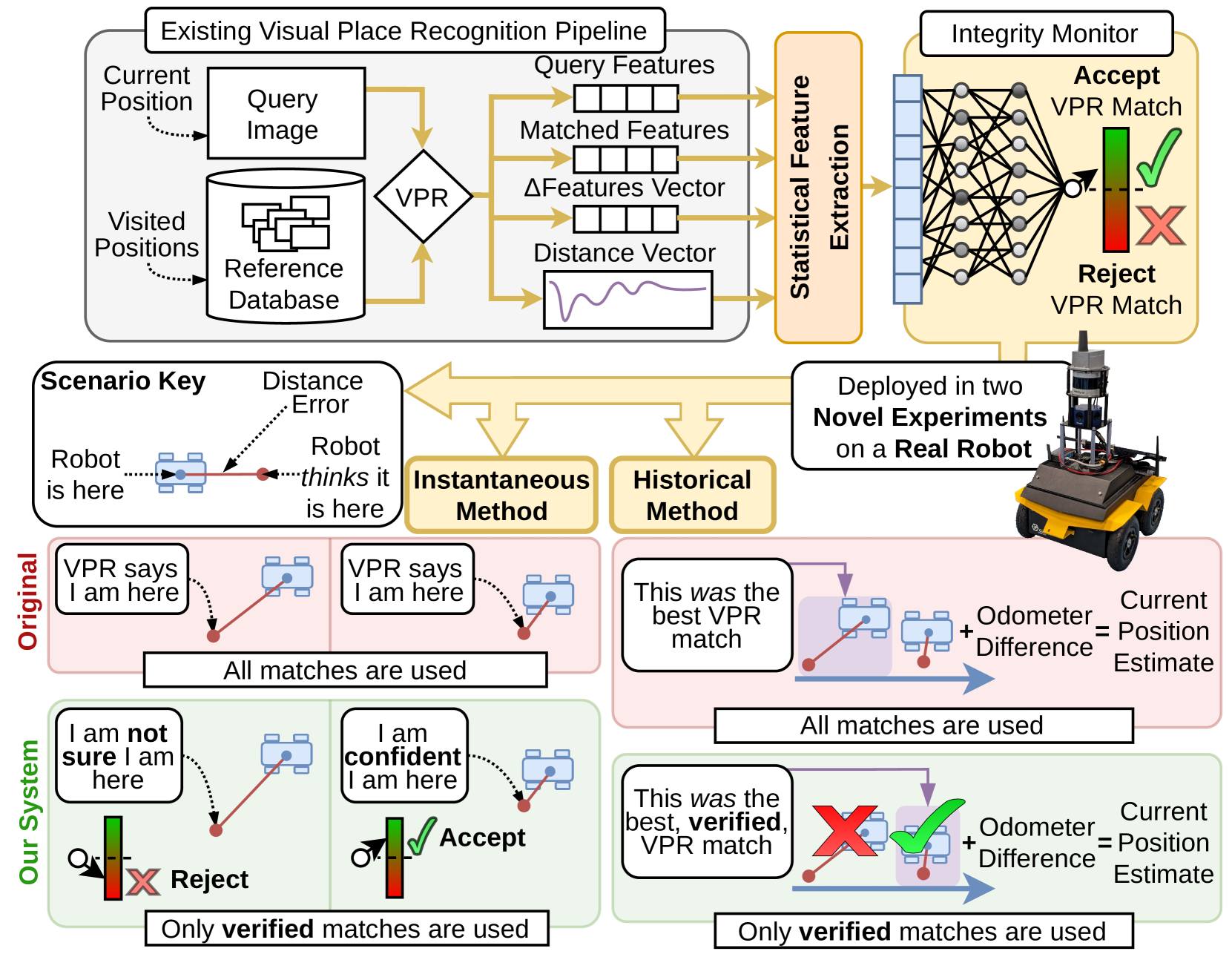
Visual Place Recognition (VPR) systems often have imperfect performance, which affects robot navigation decisions. This research introduces a novel Multi-Layer Perceptron (MLP) integrity monitor for VPR which demonstrates improved performance and generalizability over the previous state-of-the-art SVM approach, removing per-environment training and reducing manual tuning requirements. We test our proposed system in extensive real-world experiments, where we also present two real-time integrity-based VPR verification methods: an instantaneous rejection method for a robot navigating to a goal zone (Experiment 1); and a historical method that takes a best, verified, match from its recent trajectory and uses an odometer to extrapolate forwards to a current position estimate (Experiment 2). Noteworthy results for Experiment 1 include a decrease in aggregate mean along-track goal error from ~9.8m to ~3.1m in missions the robot pursued to completion, and an increase in the aggregate rate of successful mission completion from ~41% to ~55%. Experiment 2 showed a decrease in aggregate mean along-track localization error from ~2.0m to ~0.5m, and an increase in the aggregate precision of localization attempts from ~97% to ~99%. Overall, our results demonstrate the practical usefulness of a VPR integrity monitor in real-world robotics to improve VPR localization and consequent navigation performance.
Read more7/12/2024

0
Structured Pruning for Efficient Visual Place Recognition
Oliver Grainge, Michael Milford, Indu Bodala, Sarvapali D. Ramchurn, Shoaib Ehsan
Visual Place Recognition (VPR) is fundamental for the global re-localization of robots and devices, enabling them to recognize previously visited locations based on visual inputs. This capability is crucial for maintaining accurate mapping and localization over large areas. Given that VPR methods need to operate in real-time on embedded systems, it is critical to optimize these systems for minimal resource consumption. While the most efficient VPR approaches employ standard convolutional backbones with fixed descriptor dimensions, these often lead to redundancy in the embedding space as well as in the network architecture. Our work introduces a novel structured pruning method, to not only streamline common VPR architectures but also to strategically remove redundancies within the feature embedding space. This dual focus significantly enhances the efficiency of the system, reducing both map and model memory requirements and decreasing feature extraction and retrieval latencies. Our approach has reduced memory usage and latency by 21% and 16%, respectively, across models, while minimally impacting recall@1 accuracy by less than 1%. This significant improvement enhances real-time applications on edge devices with negligible accuracy loss.
Read more9/14/2024

0
VIPeR: Visual Incremental Place Recognition with Adaptive Mining and Lifelong Learning
Yuhang Ming, Minyang Xu, Xingrui Yang, Weicai Ye, Weihan Wang, Yong Peng, Weichen Dai, Wanzeng Kong
Visual place recognition (VPR) is an essential component of many autonomous and augmented/virtual reality systems. It enables the systems to robustly localize themselves in large-scale environments. Existing VPR methods demonstrate attractive performance at the cost of heavy pre-training and limited generalizability. When deployed in unseen environments, these methods exhibit significant performance drops. Targeting this issue, we present VIPeR, a novel approach for visual incremental place recognition with the ability to adapt to new environments while retaining the performance of previous environments. We first introduce an adaptive mining strategy that balances the performance within a single environment and the generalizability across multiple environments. Then, to prevent catastrophic forgetting in lifelong learning, we draw inspiration from human memory systems and design a novel memory bank for our VIPeR. Our memory bank contains a sensory memory, a working memory and a long-term memory, with the first two focusing on the current environment and the last one for all previously visited environments. Additionally, we propose a probabilistic knowledge distillation to explicitly safeguard the previously learned knowledge. We evaluate our proposed VIPeR on three large-scale datasets, namely Oxford Robotcar, Nordland, and TartanAir. For comparison, we first set a baseline performance with naive finetuning. Then, several more recent lifelong learning methods are compared. Our VIPeR achieves better performance in almost all aspects with the biggest improvement of 13.65% in average performance.
Read more8/1/2024

0
Visual place recognition for aerial imagery: A survey
Ivan Moskalenko, Anastasiia Kornilova, Gonzalo Ferrer
Aerial imagery and its direct application to visual localization is an essential problem for many Robotics and Computer Vision tasks. While Global Navigation Satellite Systems (GNSS) are the standard default solution for solving the aerial localization problem, it is subject to a number of limitations, such as, signal instability or solution unreliability that make this option not so desirable. Consequently, visual geolocalization is emerging as a viable alternative. However, adapting Visual Place Recognition (VPR) task to aerial imagery presents significant challenges, including weather variations and repetitive patterns. Current VPR reviews largely neglect the specific context of aerial data. This paper introduces a methodology tailored for evaluating VPR techniques specifically in the domain of aerial imagery, providing a comprehensive assessment of various methods and their performance. However, we not only compare various VPR methods, but also demonstrate the importance of selecting appropriate zoom and overlap levels when constructing map tiles to achieve maximum efficiency of VPR algorithms in the case of aerial imagery. The code is available on our GitHub repository -- https://github.com/prime-slam/aero-vloc.
Read more6/4/2024