VR Isle Academy: A VR Digital Twin Approach for Robotic Surgical Skill Development

0

Sign in to get full access
Overview
• This paper presents a virtual reality (VR) digital twin approach for developing robotic surgical skills called "VR Isle Academy".
• The system uses a high-fidelity digital twin of a surgical robotic system to allow trainees to practice complex surgical procedures in a realistic VR environment.
• The digital twin leverages advanced physics-based simulations and inverse kinematics to accurately model the robotic system's behavior and enable natural hand-eye coordination.
Plain English Explanation
The paper describes a new VR training system for developing skills in using robotic surgical equipment. Robotic surgery is becoming more common, but it requires specialized skills to control the complex robotic arms and instruments. The researchers created a virtual replica, or "digital twin", of a real surgical robot that trainees can practice with in VR.
This digital twin model accurately simulates the motions and behavior of the actual robot, allowing trainees to develop hand-eye coordination and master the controls in a safe, realistic virtual environment before working on real patients. By using advanced physics simulations and mathematical techniques like inverse kinematics, the system can provide a very lifelike experience that closely matches what the trainee would encounter in the operating room.
The goal is to make it easier and safer for surgeons to learn robotic surgical techniques, which have become increasingly important in modern medicine. The VR training approach allows them to practice complex procedures without risk to real patients, and potentially improve their skills compared to traditional training methods.
Technical Explanation
The key components of the VR Isle Academy system include:
-
A high-fidelity digital twin of a da Vinci surgical robot, which accurately models the kinematics and dynamics of the actual device using advanced physics simulations.
-
An inverse kinematics solver that translates the user's hand motions in VR into the appropriate joint movements of the virtual robot, providing natural hand-eye coordination.
-
A virtual operating room environment with realistic anatomical models and surgical instruments, allowing trainees to practice complete surgical procedures.
-
Performance tracking and feedback systems to assess the trainee's skill development over time.
The researchers validated the system through technical evaluations and user studies, demonstrating that it can provide a highly realistic and engaging training experience compared to traditional robotic surgery simulators. The digital twin approach allows for a level of fidelity and control that is difficult to achieve with other VR-based surgical training tools.
Critical Analysis
The paper provides a compelling proof-of-concept for using a VR digital twin to train robotic surgical skills. The technical implementation appears sound, leveraging state-of-the-art techniques in physics simulation and inverse kinematics to create a lifelike experience.
However, the research does not fully address some potential limitations and areas for further work:
-
The digital twin was only validated against a single surgical robot model (the da Vinci system). Expanding the approach to work with other robotic platforms would enhance its broader applicability.
-
While the user studies demonstrated the system's effectiveness, longer-term evaluations are needed to assess its impact on actual surgical outcomes and skill transfer to the real-world operating room.
-
The paper does not discuss how the VR training system could be integrated with existing surgical education curricula and workflows, which would be an important consideration for real-world deployment.
Additionally, future research could explore ways to further enhance the realism and training value of the system, such as by incorporating haptic feedback or real-time avatar rendering to better simulate the physical interactions involved in robotic surgery.
Conclusion
The VR Isle Academy system presents a novel approach to robotic surgical skill development, leveraging a highly accurate digital twin model to provide trainees with a safe, realistic, and engaging virtual training environment. By addressing the challenges of hand-eye coordination and procedural complexity, this technology has the potential to improve the efficiency and effectiveness of robotic surgery training, ultimately leading to better patient outcomes.
As robotic surgical systems become more prevalent, innovations like the VR Isle Academy will be crucial for ensuring that surgeons can develop the necessary skills to leverage these advanced technologies effectively. This research represents an important step forward in bridging the gap between virtual and physical surgical practice.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
VR Isle Academy: A VR Digital Twin Approach for Robotic Surgical Skill Development
Achilleas Filippidis, Nikolaos Marmaras, Michael Maravgakis, Alexandra Plexousaki, Manos Kamarianakis, George Papagiannakis
Contemporary progress in the field of robotics, marked by improved efficiency and stability, has paved the way for the global adoption of surgical robotic systems (SRS). While these systems enhance surgeons' skills by offering a more accurate and less invasive approach to operations, they come at a considerable cost. Moreover, SRS components often involve heavy machinery, making the training process challenging due to limited access to such equipment. In this paper we introduce a cost-effective way to facilitate training for a simulator of a SRS via a portable, device-agnostic, ultra realistic simulation with hand tracking and feet tracking support. Error assessment is accessible in both real-time and offline, which enables the monitoring and tracking of users' performance. The VR application has been objectively evaluated by several untrained testers showcasing significant reduction in error metrics as the number of training sessions increases. This indicates that the proposed VR application denoted as VR Isle Academy operates efficiently, improving the robot - controlling skills of the testers in an intuitive and immersive way towards reducing the learning curve at minimal cost.
Read more7/2/2024

0
Improving the realism of robotic surgery simulation through injection of learning-based estimated errors
Juan Antonio Barragan, Hisashi Ishida, Adnan Munawar, Peter Kazanzides
The development of algorithms for automation of subtasks during robotic surgery can be accelerated by the availability of realistic simulation environments. In this work, we focus on one aspect of the realism of a surgical simulator, which is the positional accuracy of the robot. In current simulators, robots have perfect or near-perfect accuracy, which is not representative of their physical counterparts. We therefore propose a pair of neural networks, trained by data collected from a physical robot, to estimate both the controller error and the kinematic and non-kinematic error. These error estimates are then injected within the simulator to produce a simulated robot that has the characteristic performance of the physical robot. In this scenario, we believe it is sufficient for the estimated error used in the simulation to have a statistically similar distribution to the actual error of the physical robot. This is less stringent, and therefore more tenable, than the requirement for error compensation of a physical robot, where the estimated error should equal the actual error. Our results demonstrate that error injection reduces the mean position and orientation differences between the simulated and physical robots from 5.0 mm / 3.6 deg to 1.3 mm / 1.7 deg, respectively, which represents reductions by factors of 3.8 and 2.1.
Read more6/12/2024

0
A Realistic Surgical Simulator for Non-Rigid and Contact-Rich Manipulation in Surgeries with the da Vinci Research Kit
Yafei Ou, Sadra Zargarzadeh, Paniz Sedighi, Mahdi Tavakoli
Realistic real-time surgical simulators play an increasingly important role in surgical robotics research, such as surgical robot learning and automation, and surgical skills assessment. Although there are a number of existing surgical simulators for research, they generally lack the ability to simulate the diverse types of objects and contact-rich manipulation tasks typically present in surgeries, such as tissue cutting and blood suction. In this work, we introduce CRESSim, a realistic surgical simulator based on PhysX 5 for the da Vinci Research Kit (dVRK) that enables simulating various contact-rich surgical tasks involving different surgical instruments, soft tissue, and body fluids. The real-world dVRK console and the master tool manipulator (MTM) robots are incorporated into the system to allow for teleoperation through virtual reality (VR). To showcase the advantages and potentials of the simulator, we present three examples of surgical tasks, including tissue grasping and deformation, blood suction, and tissue cutting. These tasks are performed using the simulated surgical instruments, including the large needle driver, suction irrigator, and curved scissor, through VR-based teleoperation.
Read more4/10/2024
0
SIM2VR: Towards Automated Biomechanical Testing in VR
Florian Fischer, Aleksi Ikkala, Markus Klar, Arthur Fleig, Miroslav Bachinski, Roderick Murray-Smith, Perttu Hamalainen, Antti Oulasvirta, Jorg Muller
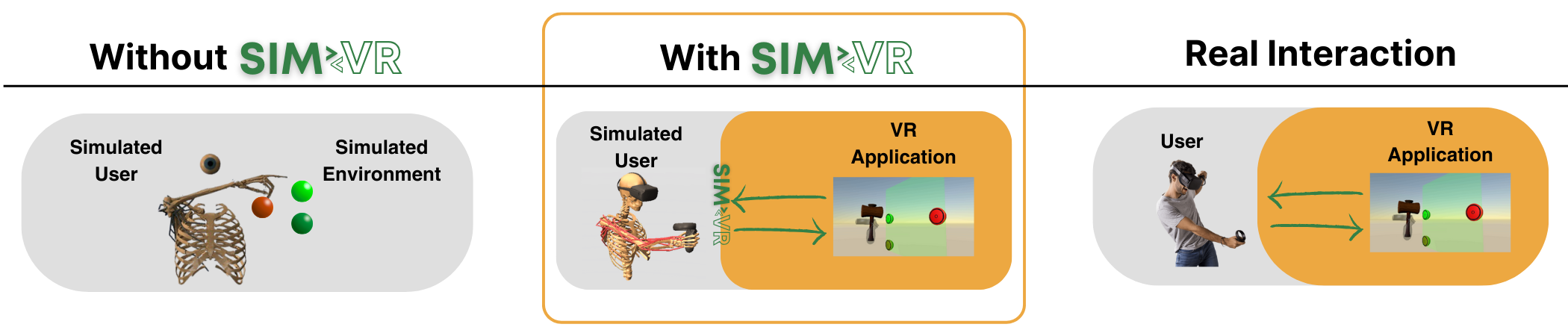
Automated biomechanical testing has great potential for the development of VR applications, as initial insights into user behaviour can be gained in silico early in the design process. In particular, it allows prediction of user movements and ergonomic variables, such as fatigue, prior to conducting user studies. However, there is a fundamental disconnect between simulators hosting state-of-the-art biomechanical user models and simulators used to develop and run VR applications. Existing user simulators often struggle to capture the intricacies of real-world VR applications, reducing ecological validity of user predictions. In this paper, we introduce SIM2VR, a system that aligns user simulation with a given VR application by establishing a continuous closed loop between the two processes. This, for the first time, enables training simulated users directly in the same VR application that real users interact with. We demonstrate that SIM2VR can predict differences in user performance, ergonomics and strategies in a fast-paced, dynamic arcade game. In order to expand the scope of automated biomechanical testing beyond simple visuomotor tasks, advances in cognitive models and reward function design will be needed.
Read more8/9/2024