Improving the realism of robotic surgery simulation through injection of learning-based estimated errors

0

Sign in to get full access
Overview
- This paper presents a method to improve the realism of robotic surgery simulation by injecting learning-based estimated errors into the simulated data.
- The goal is to make the simulated data more representative of real-world surgical scenarios, which can enhance the training and evaluation of robotic surgical systems.
- The proposed approach leverages machine learning models to estimate the errors that occur during actual robotic surgery, and then incorporates these errors into the simulation.
Plain English Explanation
Robotic surgery is an increasingly common medical procedure, where a surgeon controls a robotic arm to perform delicate operations. However, training and testing these robotic systems is challenging, as it's difficult to recreate the exact conditions of a real surgery in a simulation.
To make simulations more realistic, the researchers in this paper used machine learning to model the types of errors that can occur during real robotic surgeries. This allows for more realistic training and testing of robotic surgical systems. For example, the robot may not move with perfect precision, or sensors may have slight inaccuracies. By injecting these estimated errors into the simulation, it becomes a closer match to real-world conditions.
The key idea is to leverage data from actual robotic surgeries to train models that can predict the kinds of errors that are likely to occur. These error models are then used to perturb the simulated data, making it more representative of reality. This approach can help bridge the gap between simulated and real-world robotic surgery, leading to better training and evaluation of these systems.
Technical Explanation
The paper first reviews related work on improving the realism of robotic surgery simulation and the use of machine learning for surgical error estimation.
The core of the proposed approach is a set of neural network models that are trained to predict various error types observed in real robotic surgery data. These include errors in tool positioning, orientation, and interaction forces. The models take as input the simulated surgical scene and output the corresponding error estimates.
During simulation, these learned error models are used to perturb the simulated data, introducing realistic artifacts that better match real-world conditions. Experiments are conducted using a da Vinci surgical robot dataset, evaluating the impact of the error injection on downstream tasks like surgical skill assessment.
The results show that incorporating the learning-based error estimates significantly improves the realism of the simulated data, leading to better performance on the surgical skill evaluation task compared to using unperturbed simulation data.
Critical Analysis
The paper provides a compelling approach to enhancing the realism of robotic surgery simulation, which is an important step towards better training and evaluation of these systems. By leveraging machine learning to model real-world errors, the researchers are able to inject more representative artifacts into the simulated data.
One limitation is that the error models are trained on a specific dataset of da Vinci robot surgeries. While the approach could potentially generalize to other robotic systems, further work may be needed to validate its effectiveness across a wider range of robotic platforms and surgical procedures.
Additionally, the paper does not explore the sensitivity of the results to the hyperparameters and architectural choices of the error prediction models. Further investigation into the robustness of the approach could strengthen the conclusions.
Overall, this research represents an important step towards bridging the gap between simulated and real-world robotic surgery, with potential benefits for the development and deployment of these advanced medical technologies.
Conclusion
This paper presents a novel method to improve the realism of robotic surgery simulation by injecting learning-based estimates of errors that occur in actual surgical procedures. By leveraging machine learning to model real-world error patterns, the researchers are able to perturb simulated data in a way that better reflects the challenges of performing surgery with a robotic system.
The results demonstrate that this approach can lead to significant improvements in the fidelity of the simulated data, which in turn enhances the performance of downstream tasks like surgical skill assessment. This work represents an important advancement in the field of robotic surgery simulation, with the potential to drive progress in the development and deployment of these advanced medical technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Improving the realism of robotic surgery simulation through injection of learning-based estimated errors
Juan Antonio Barragan, Hisashi Ishida, Adnan Munawar, Peter Kazanzides
The development of algorithms for automation of subtasks during robotic surgery can be accelerated by the availability of realistic simulation environments. In this work, we focus on one aspect of the realism of a surgical simulator, which is the positional accuracy of the robot. In current simulators, robots have perfect or near-perfect accuracy, which is not representative of their physical counterparts. We therefore propose a pair of neural networks, trained by data collected from a physical robot, to estimate both the controller error and the kinematic and non-kinematic error. These error estimates are then injected within the simulator to produce a simulated robot that has the characteristic performance of the physical robot. In this scenario, we believe it is sufficient for the estimated error used in the simulation to have a statistically similar distribution to the actual error of the physical robot. This is less stringent, and therefore more tenable, than the requirement for error compensation of a physical robot, where the estimated error should equal the actual error. Our results demonstrate that error injection reduces the mean position and orientation differences between the simulated and physical robots from 5.0 mm / 3.6 deg to 1.3 mm / 1.7 deg, respectively, which represents reductions by factors of 3.8 and 2.1.
Read more6/12/2024
0
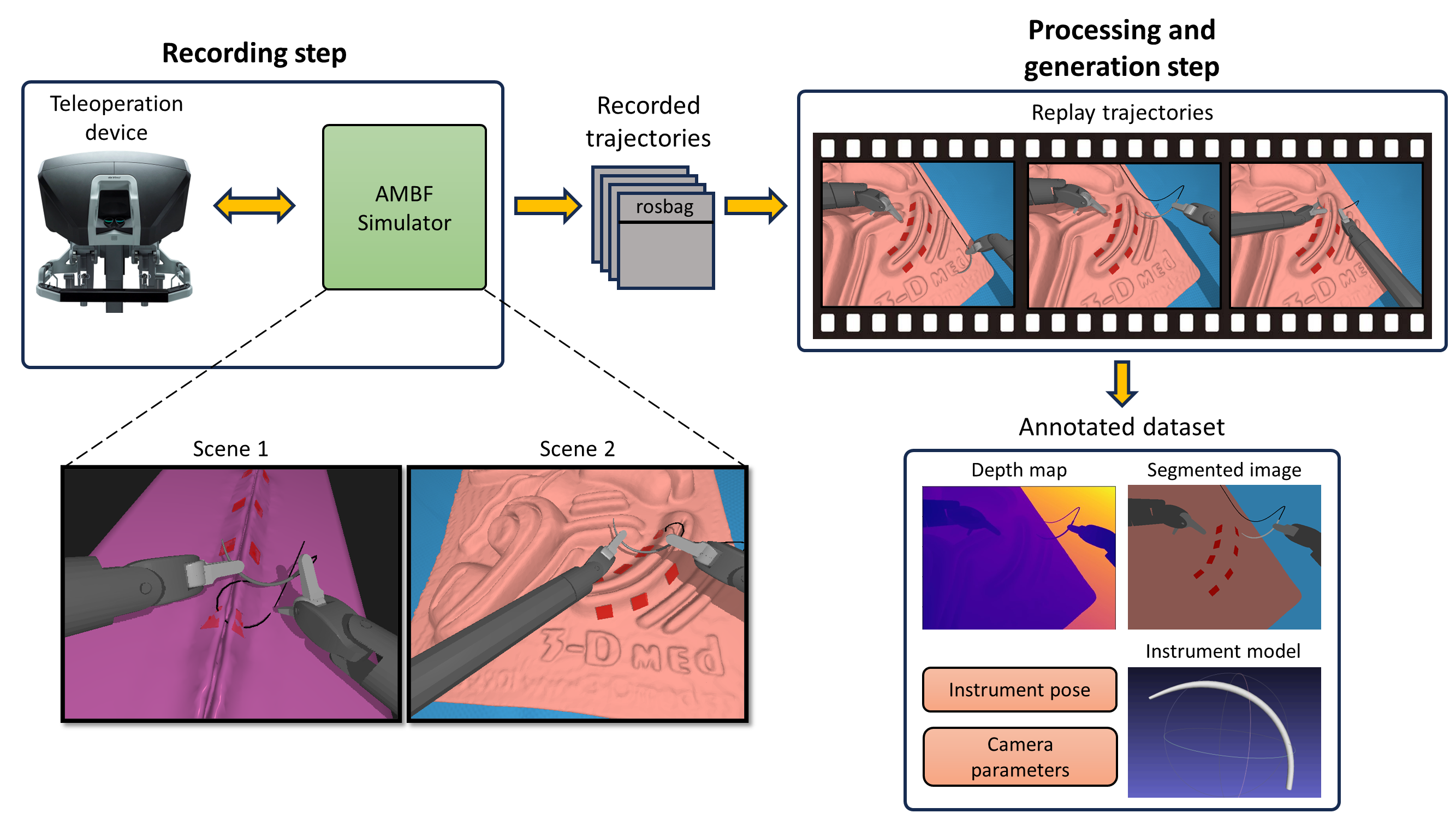
Realistic Data Generation for 6D Pose Estimation of Surgical Instruments
Juan Antonio Barragan, Jintan Zhang, Haoying Zhou, Adnan Munawar, Peter Kazanzides
Automation in surgical robotics has the potential to improve patient safety and surgical efficiency, but it is difficult to achieve due to the need for robust perception algorithms. In particular, 6D pose estimation of surgical instruments is critical to enable the automatic execution of surgical maneuvers based on visual feedback. In recent years, supervised deep learning algorithms have shown increasingly better performance at 6D pose estimation tasks; yet, their success depends on the availability of large amounts of annotated data. In household and industrial settings, synthetic data, generated with 3D computer graphics software, has been shown as an alternative to minimize annotation costs of 6D pose datasets. However, this strategy does not translate well to surgical domains as commercial graphics software have limited tools to generate images depicting realistic instrument-tissue interactions. To address these limitations, we propose an improved simulation environment for surgical robotics that enables the automatic generation of large and diverse datasets for 6D pose estimation of surgical instruments. Among the improvements, we developed an automated data generation pipeline and an improved surgical scene. To show the applicability of our system, we generated a dataset of 7.5k images with pose annotations of a surgical needle that was used to evaluate a state-of-the-art pose estimation network. The trained model obtained a mean translational error of 2.59mm on a challenging dataset that presented varying levels of occlusion. These results highlight our pipeline's success in training and evaluating novel vision algorithms for surgical robotics applications.
Read more6/12/2024
0
New!Embedded Image-to-Image Translation for Efficient Sim-to-Real Transfer in Learning-based Robot-Assisted Soft Manipulation
Jacinto Colan, Keisuke Sugita, Ana Davila, Yutaro Yamada, Yasuhisa Hasegawa
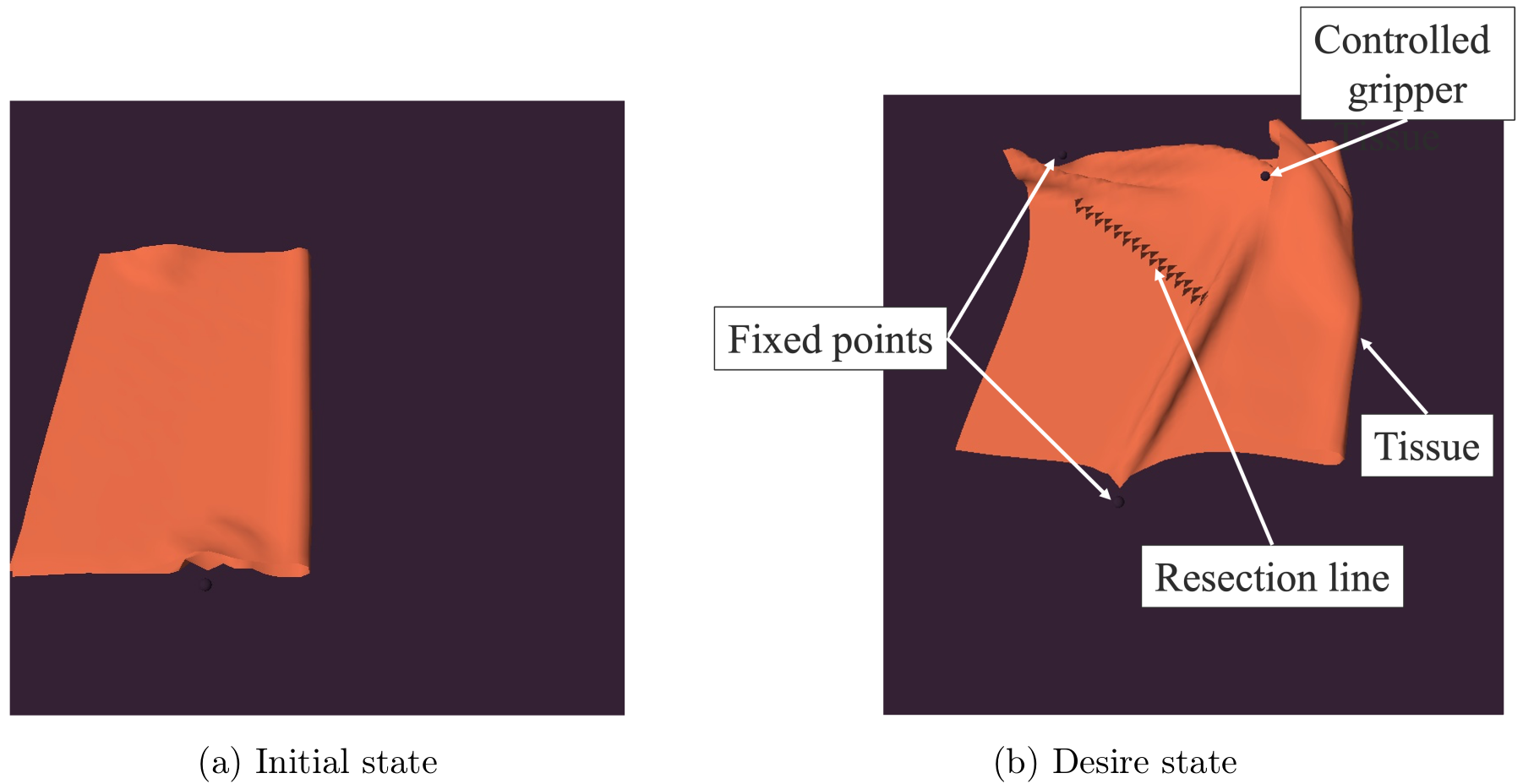
Recent advances in robotic learning in simulation have shown impressive results in accelerating learning complex manipulation skills. However, the sim-to-real gap, caused by discrepancies between simulation and reality, poses significant challenges for the effective deployment of autonomous surgical systems. We propose a novel approach utilizing image translation models to mitigate domain mismatches and facilitate efficient robot skill learning in a simulated environment. Our method involves the use of contrastive unpaired Image-to-image translation, allowing for the acquisition of embedded representations from these transformed images. Subsequently, these embeddings are used to improve the efficiency of training surgical manipulation models. We conducted experiments to evaluate the performance of our approach, demonstrating that it significantly enhances task success rates and reduces the steps required for task completion compared to traditional methods. The results indicate that our proposed system effectively bridges the sim-to-real gap, providing a robust framework for advancing the autonomy of surgical robots in minimally invasive procedures.
Read more9/17/2024

0
VR Isle Academy: A VR Digital Twin Approach for Robotic Surgical Skill Development
Achilleas Filippidis, Nikolaos Marmaras, Michael Maravgakis, Alexandra Plexousaki, Manos Kamarianakis, George Papagiannakis
Contemporary progress in the field of robotics, marked by improved efficiency and stability, has paved the way for the global adoption of surgical robotic systems (SRS). While these systems enhance surgeons' skills by offering a more accurate and less invasive approach to operations, they come at a considerable cost. Moreover, SRS components often involve heavy machinery, making the training process challenging due to limited access to such equipment. In this paper we introduce a cost-effective way to facilitate training for a simulator of a SRS via a portable, device-agnostic, ultra realistic simulation with hand tracking and feet tracking support. Error assessment is accessible in both real-time and offline, which enables the monitoring and tracking of users' performance. The VR application has been objectively evaluated by several untrained testers showcasing significant reduction in error metrics as the number of training sessions increases. This indicates that the proposed VR application denoted as VR Isle Academy operates efficiently, improving the robot - controlling skills of the testers in an intuitive and immersive way towards reducing the learning curve at minimal cost.
Read more7/2/2024