A Realistic Surgical Simulator for Non-Rigid and Contact-Rich Manipulation in Surgeries with the da Vinci Research Kit

0

Sign in to get full access
Overview
- This paper presents a realistic surgical simulator for non-rigid and contact-rich manipulation tasks, designed to work with the da Vinci Research Kit (dVRK).
- The simulator aims to enable realistic training and evaluation of robotic surgical systems, particularly in complex scenarios involving deformable tissues and frequent contact.
- The authors develop a physics-based simulation framework that models the dynamics of soft tissues, tools, and the robot, enabling realistic simulation of surgical procedures.
- Experiments demonstrate the simulator's ability to reproduce the behavior of real-world surgical tasks, including suturing and knot-tying, with high fidelity.
Plain English Explanation
This research paper describes the development of a comprehensive surgical simulator that can realistically model the complex interactions and deformations that occur during robotic-assisted surgical procedures. The key innovation is the use of advanced physics-based simulation techniques to capture the behavior of soft tissues, surgical instruments, and the robotic arms with a high degree of accuracy.
Unlike traditional surgical simulators that rely on simplified models, this simulator aims to closely mimic the real-world dynamics encountered during procedures, such as the deformation of tissues during manipulation and the intricate contact forces between instruments and organs. This level of realism is crucial for effectively training robotic surgical systems and evaluating their performance in challenging, real-world-like scenarios.
The researchers tested their simulator by simulating common surgical tasks like suturing and knot-tying, and found that the simulated results closely matched the behavior observed in actual robotic-assisted surgeries. This suggests that the simulator can be a valuable tool for developing and testing new robotic surgical techniques without the need for extensive and costly real-world experimentation.
Technical Explanation
The key technical aspects of this research are the development of a physics-based simulation framework that can accurately model the dynamics of soft tissues, surgical instruments, and the da Vinci Research Kit (dVRK) robotic system. This involves the use of advanced simulation techniques, such as finite element methods and constraint-based contact modeling, to capture the complex deformations and interactions that occur during surgical procedures.
The researchers validated their simulator by comparing the simulated results of common surgical tasks, such as suturing and knot-tying, to empirical data collected from real-world robotic-assisted surgeries. The high degree of fidelity observed in these comparisons demonstrates the effectiveness of the simulation framework in capturing the essential features of surgical manipulation.
Critical Analysis
The researchers acknowledge several limitations and areas for future work in their paper. One key limitation is the computational complexity of the simulation, which may limit its use in real-time applications or large-scale training scenarios. The authors suggest that further optimizations and the use of specialized hardware, such as GPUs, could help to address this issue.
Additionally, the simulator currently focuses on modeling the behavior of soft tissues and surgical instruments, but does not yet incorporate the full range of factors that can influence surgical outcomes, such as physiological responses, patient-specific anatomy, and the effects of surgical interventions on underlying pathologies. Expanding the simulator to consider these additional elements could further enhance its utility for training and evaluation.
Overall, the researchers have made a significant contribution to the field of robotic surgery by developing a highly realistic simulation framework that can serve as a valuable tool for advancing the state of the art in surgical robotics. As the technology continues to evolve, it will be important to critically examine the limitations and potential biases inherent in such simulation-based approaches, and to ensure that they are used in a responsible and ethical manner.
Conclusion
This paper presents a novel surgical simulator that leverages advanced physics-based modeling techniques to enable realistic simulation of complex robotic-assisted surgical procedures. By accurately capturing the dynamic behavior of soft tissues, surgical instruments, and the dVRK robotic system, the simulator has the potential to significantly enhance the development and evaluation of new surgical techniques and robotic systems.
The high fidelity of the simulated results, as demonstrated through comparisons with real-world data, suggests that this simulator could be a valuable tool for robotic surgery research and training, allowing for more efficient and cost-effective exploration of surgical scenarios without the need for extensive physical experimentation.
As the field of robotic surgery continues to rapidly evolve, tools like this realistic surgical simulator will likely play an increasingly important role in driving innovation and ensuring the safety and efficacy of these advanced medical technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Realistic Surgical Simulator for Non-Rigid and Contact-Rich Manipulation in Surgeries with the da Vinci Research Kit
Yafei Ou, Sadra Zargarzadeh, Paniz Sedighi, Mahdi Tavakoli
Realistic real-time surgical simulators play an increasingly important role in surgical robotics research, such as surgical robot learning and automation, and surgical skills assessment. Although there are a number of existing surgical simulators for research, they generally lack the ability to simulate the diverse types of objects and contact-rich manipulation tasks typically present in surgeries, such as tissue cutting and blood suction. In this work, we introduce CRESSim, a realistic surgical simulator based on PhysX 5 for the da Vinci Research Kit (dVRK) that enables simulating various contact-rich surgical tasks involving different surgical instruments, soft tissue, and body fluids. The real-world dVRK console and the master tool manipulator (MTM) robots are incorporated into the system to allow for teleoperation through virtual reality (VR). To showcase the advantages and potentials of the simulator, we present three examples of surgical tasks, including tissue grasping and deformation, blood suction, and tissue cutting. These tasks are performed using the simulated surgical instruments, including the large needle driver, suction irrigator, and curved scissor, through VR-based teleoperation.
Read more4/10/2024

0
VR Isle Academy: A VR Digital Twin Approach for Robotic Surgical Skill Development
Achilleas Filippidis, Nikolaos Marmaras, Michael Maravgakis, Alexandra Plexousaki, Manos Kamarianakis, George Papagiannakis
Contemporary progress in the field of robotics, marked by improved efficiency and stability, has paved the way for the global adoption of surgical robotic systems (SRS). While these systems enhance surgeons' skills by offering a more accurate and less invasive approach to operations, they come at a considerable cost. Moreover, SRS components often involve heavy machinery, making the training process challenging due to limited access to such equipment. In this paper we introduce a cost-effective way to facilitate training for a simulator of a SRS via a portable, device-agnostic, ultra realistic simulation with hand tracking and feet tracking support. Error assessment is accessible in both real-time and offline, which enables the monitoring and tracking of users' performance. The VR application has been objectively evaluated by several untrained testers showcasing significant reduction in error metrics as the number of training sessions increases. This indicates that the proposed VR application denoted as VR Isle Academy operates efficiently, improving the robot - controlling skills of the testers in an intuitive and immersive way towards reducing the learning curve at minimal cost.
Read more7/2/2024
0
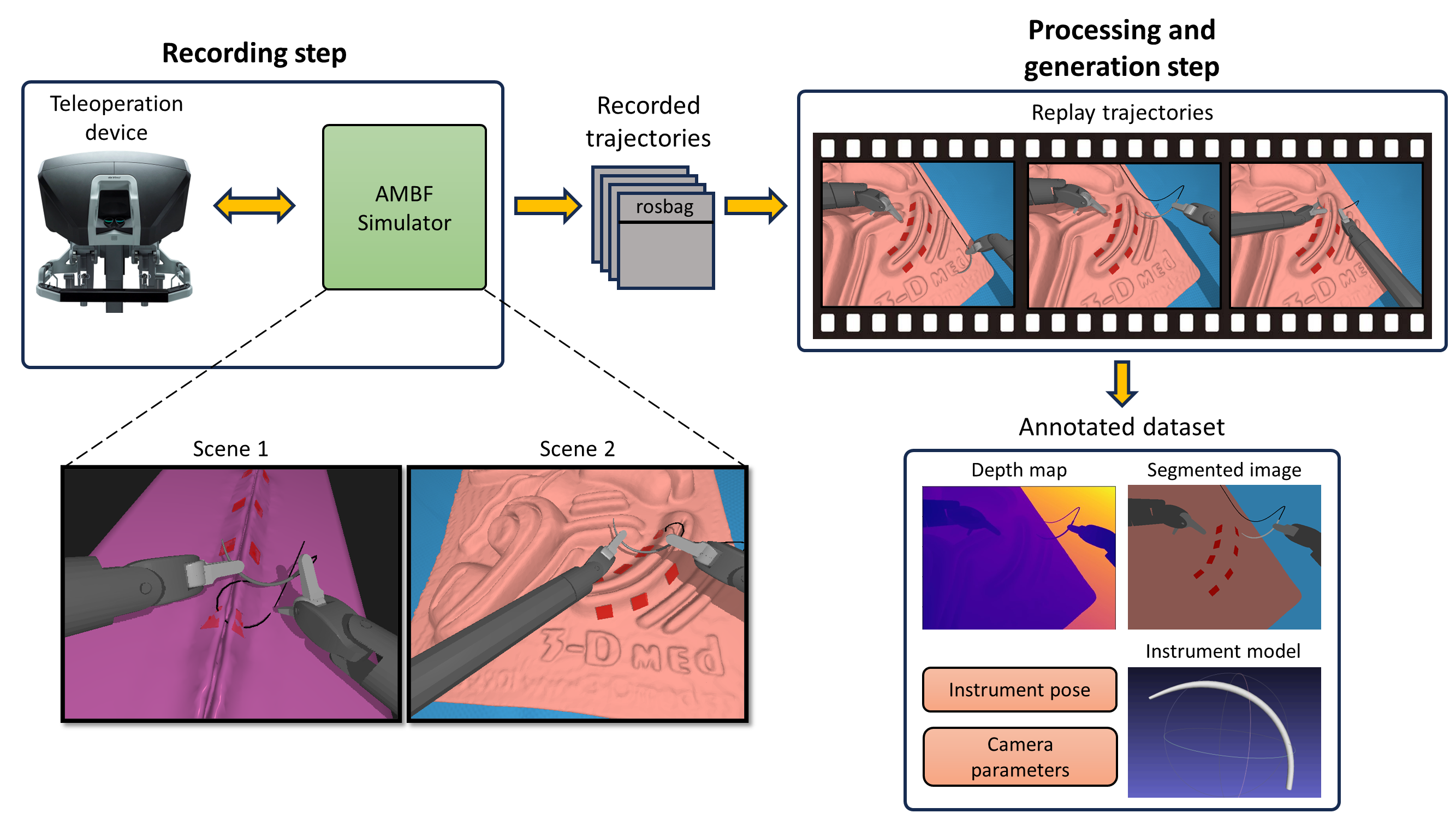
Realistic Data Generation for 6D Pose Estimation of Surgical Instruments
Juan Antonio Barragan, Jintan Zhang, Haoying Zhou, Adnan Munawar, Peter Kazanzides
Automation in surgical robotics has the potential to improve patient safety and surgical efficiency, but it is difficult to achieve due to the need for robust perception algorithms. In particular, 6D pose estimation of surgical instruments is critical to enable the automatic execution of surgical maneuvers based on visual feedback. In recent years, supervised deep learning algorithms have shown increasingly better performance at 6D pose estimation tasks; yet, their success depends on the availability of large amounts of annotated data. In household and industrial settings, synthetic data, generated with 3D computer graphics software, has been shown as an alternative to minimize annotation costs of 6D pose datasets. However, this strategy does not translate well to surgical domains as commercial graphics software have limited tools to generate images depicting realistic instrument-tissue interactions. To address these limitations, we propose an improved simulation environment for surgical robotics that enables the automatic generation of large and diverse datasets for 6D pose estimation of surgical instruments. Among the improvements, we developed an automated data generation pipeline and an improved surgical scene. To show the applicability of our system, we generated a dataset of 7.5k images with pose annotations of a surgical needle that was used to evaluate a state-of-the-art pose estimation network. The trained model obtained a mean translational error of 2.59mm on a challenging dataset that presented varying levels of occlusion. These results highlight our pipeline's success in training and evaluating novel vision algorithms for surgical robotics applications.
Read more6/12/2024
0
Soft Contact Simulation and Manipulation Learning of Deformable Objects with Vision-based Tactile Sensor
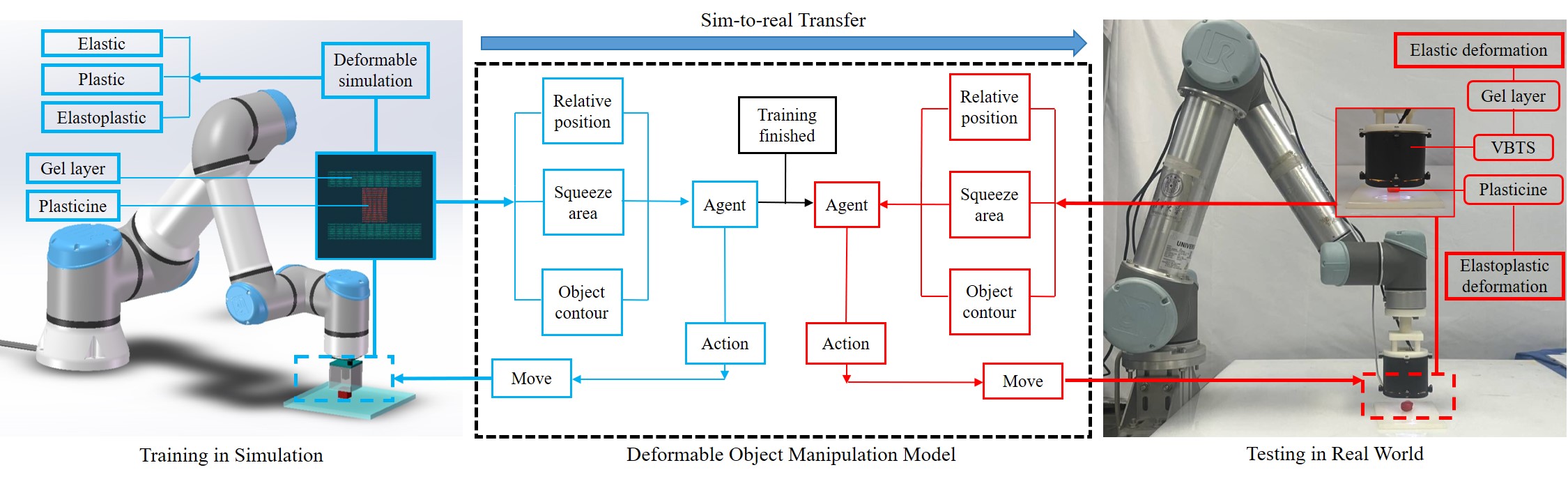
Jianhua Shan, Yuhao Sun, Shixin Zhang, Fuchun Sun, Zixi Chen, Zirong Shen, Cesare Stefanini, Yiyong Yang, Shan Luo, Bin Fang
Deformable object manipulation is a classical and challenging research area in robotics. Compared with rigid object manipulation, this problem is more complex due to the deformation properties including elastic, plastic, and elastoplastic deformation. In this paper, we describe a new deformable object manipulation method including soft contact simulation, manipulation learning, and sim-to-real transfer. We propose a novel approach utilizing Vision-Based Tactile Sensors (VBTSs) as the end-effector in simulation to produce observations like relative position, squeezed area, and object contour, which are transferable to real robots. For a more realistic contact simulation, a new simulation environment including elastic, plastic, and elastoplastic deformations is created. We utilize RL strategies to train agents in the simulation, and expert demonstrations are applied for challenging tasks. Finally, we build a real experimental platform to complete the sim-to-real transfer and achieve a 90% success rate on difficult tasks such as cylinder and sphere. To test the robustness of our method, we use plasticine of different hardness and sizes to repeat the tasks including cylinder and sphere. The experimental results show superior performances of deformable object manipulation with the proposed method.
Read more5/14/2024