VRPD-DT: Vehicle Routing Problem with Drones Under Dynamically Changing Traffic Conditions
2404.09065
0
0
Abstract
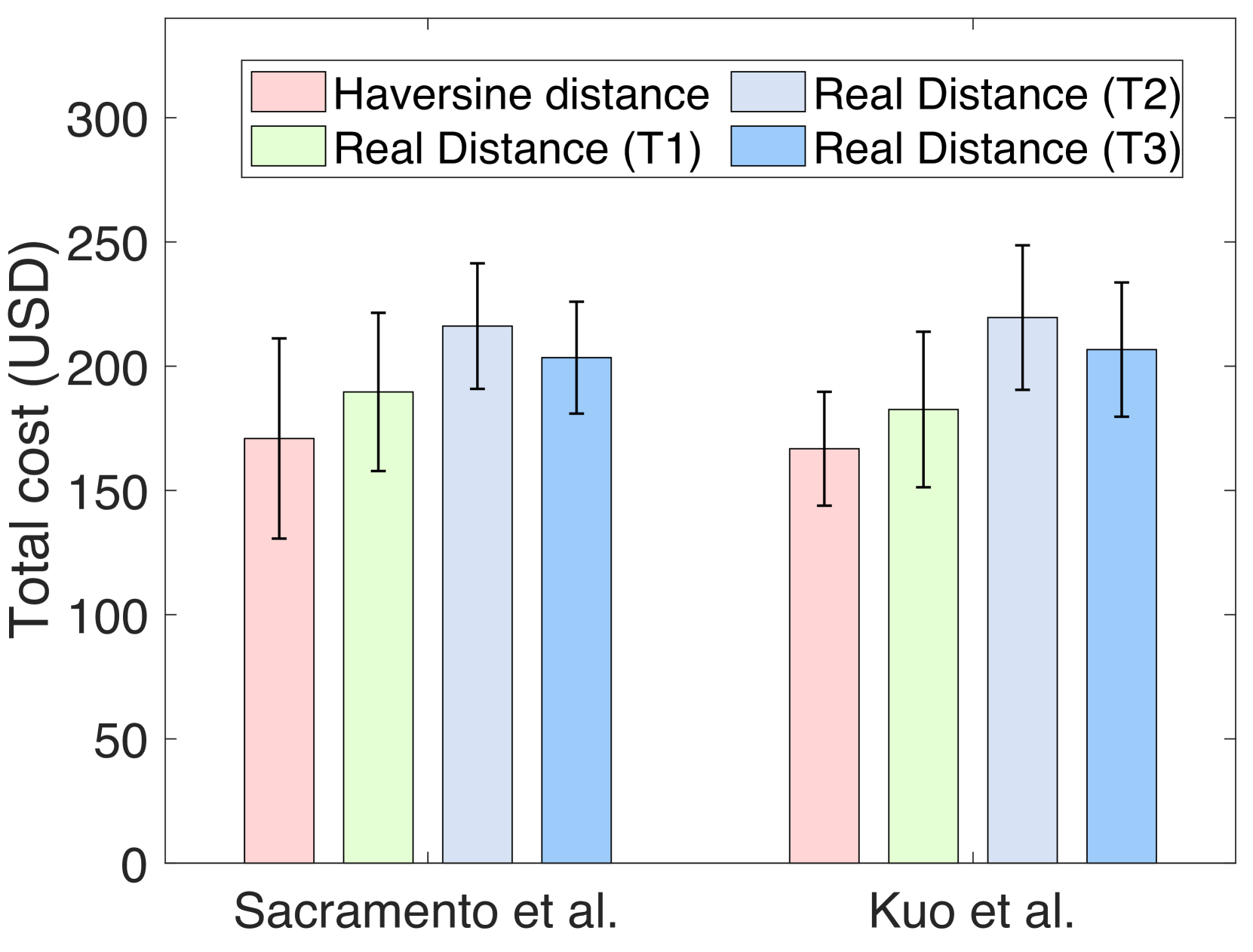
The vehicle routing problem with drones (VRP-D) is to determine the optimal routes of trucks and drones such that the total operational cost is minimized in a scenario where the trucks work in tandem with the drones to deliver parcels to customers. While various heuristic algorithms have been developed to address the problem, existing solutions are built based on simplistic cost models, overlooking the temporal dynamics of the costs, which fluctuate depending on the dynamically changing traffic conditions. In this paper, we present a novel problem called the vehicle routing problem with drones under dynamically changing traffic conditions (VRPD-DT) to address the limitation of existing VRP-D solutions. We design a novel cost model that factors in the actual travel distance and projected travel time, computed using a machine learning-driven travel time prediction algorithm. A variable neighborhood descent (VND) algorithm is developed to find the optimal truck-drone routes under the dynamics of traffic conditions through incorporation of the travel time prediction model. A simulation study was performed to evaluate the performance compared with a state-of-the-art VRP-D heuristic solution. The results demonstrate that the proposed algorithm outperforms the state-of-the-art algorithm in various delivery scenarios.
Create account to get full access
Overview
- This paper presents the "Vehicle Routing Problem with Drones under Dynamically Changing Traffic Conditions" (VRPD-DT), which explores the use of drones to enhance traditional vehicle routing in a real-world setting with fluctuating traffic conditions.
- The researchers develop a novel optimization framework to solve this complex problem, incorporating factors such as dynamic traffic, drone capabilities, and delivery requirements.
- The proposed approach aims to improve delivery efficiency, reduce carbon emissions, and provide insights for practical implementation of drone-assisted logistics.
Plain English Explanation
The paper tackles the challenge of optimizing delivery routes when using both traditional vehicles and drones. In the real world, traffic conditions are constantly changing, which can disrupt delivery schedules and make it difficult to plan efficient routes. To address this, the researchers developed a new system that takes into account the dynamic nature of traffic, as well as the unique capabilities of drones.
By using a combination of ground vehicles and aerial drones, the goal is to find the most efficient way to make deliveries, while also considering factors like the time it takes to complete a delivery, the cost, and the environmental impact. The researchers' approach aims to create a more flexible and adaptable delivery network that can respond to changing conditions on the roads.
This could be particularly useful in urban areas, where traffic congestion is a constant problem. Drones may be able to bypass traffic jams and reach some destinations more quickly than ground vehicles. However, drones also have limitations, such as battery life and payload capacity, so the researchers had to balance the use of drones with traditional vehicles to create an optimal solution.
Overall, the research provides a framework for integrating drones into existing delivery systems in a way that improves efficiency, reduces emissions, and makes logistics more resilient to changing conditions. This could have important implications for the future of urban transportation and e-commerce delivery.
Technical Explanation
The researchers propose the "Vehicle Routing Problem with Drones under Dynamically Changing Traffic Conditions" (VRPD-DT), which extends the traditional vehicle routing problem to incorporate the use of drones and account for fluctuating traffic conditions.
The VRPD-DT model considers a fleet of ground vehicles and drones, each with their own capabilities and constraints, such as cargo capacity and battery life. The objective is to minimize the total delivery time, cost, and carbon emissions by optimizing the routes and determining when to use drones versus ground vehicles.
To address the dynamic nature of traffic, the researchers integrate a time-optimal path parametrization algorithm that can quickly adapt to changing road conditions. This allows the system to continuously re-optimize the delivery routes as traffic patterns evolve.
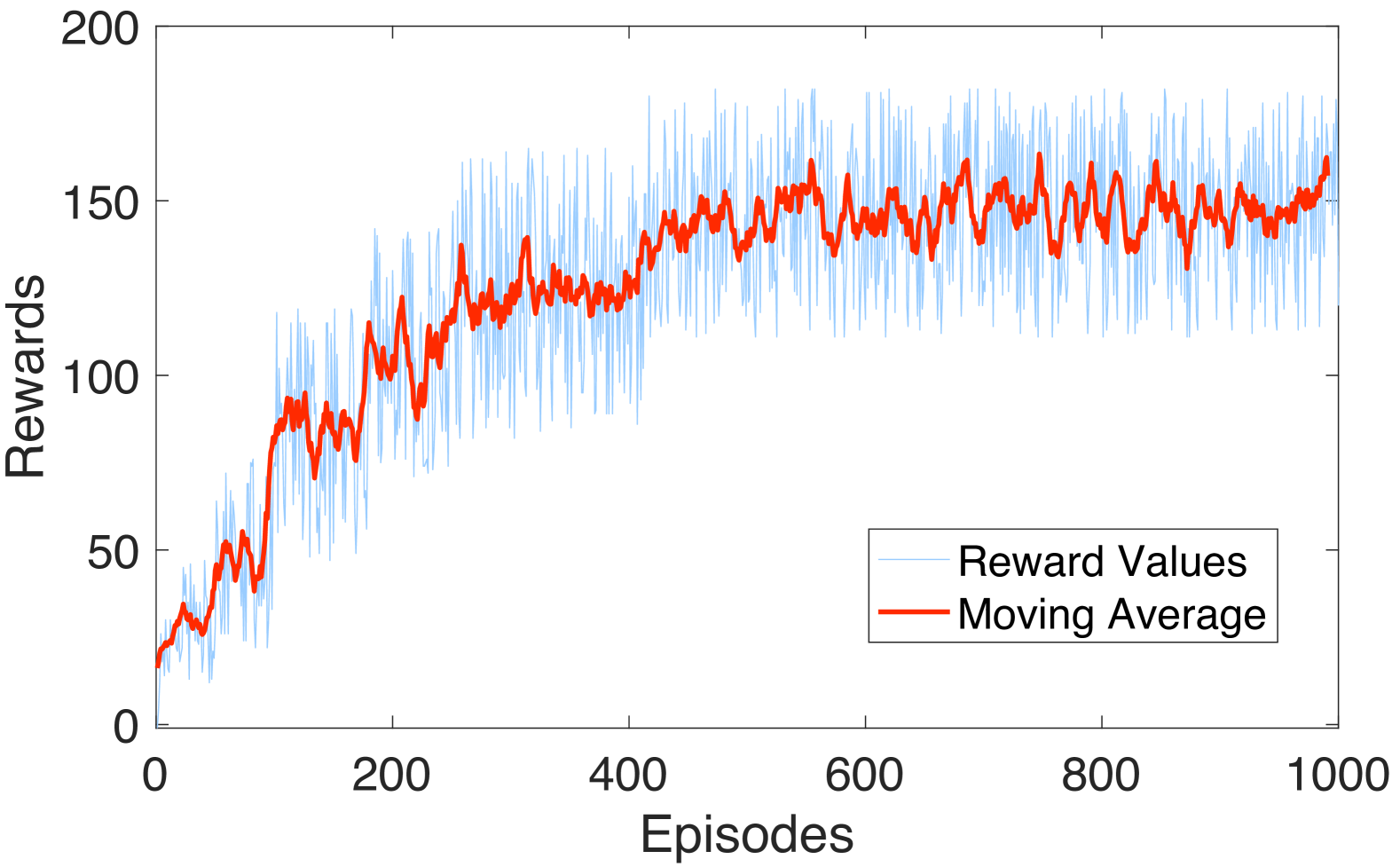
The proposed optimization framework combines techniques from interactive routing, truck tracking, and reinforcement learning to handle the complex decision-making required in this scenario.
Through simulations and case studies, the researchers demonstrate the effectiveness of their VRPD-DT approach in improving delivery efficiency, reducing carbon emissions, and providing insights for the practical implementation of drone-assisted logistics.
Critical Analysis
The VRPD-DT model presented in the paper addresses an important real-world problem, but there are a few caveats and areas for further research:
- The simulation-based evaluation provides a proof of concept, but the researchers acknowledge the need for field trials to validate the performance in real-world conditions.
- The model assumes perfect information about traffic conditions, which may not be the case in practice. Incorporating more uncertainty and incomplete data could enhance the robustness of the approach.
- The study focuses on urban deliveries, but the applicability of the VRPD-DT framework to other logistics scenarios, such as rural or long-distance transportation, remains to be explored.
- The environmental impact analysis could be expanded to consider a wider range of factors, such as noise pollution and wildlife implications of drone operations.
Overall, the VRPD-DT research provides a valuable contribution to the field of drone-assisted logistics, but further work is needed to address the practical challenges and broader implications of integrating drones into transportation systems.
Conclusion
The VRPD-DT model presented in this paper offers a novel approach to optimizing delivery routes that combine traditional vehicles and drones in the face of dynamically changing traffic conditions. By accounting for factors such as delivery time, cost, and carbon emissions, the researchers have developed a framework that can potentially improve the efficiency and sustainability of urban logistics.
The integration of drones and the ability to quickly adapt to fluctuating traffic patterns are key innovations that could have far-reaching implications for the future of transportation and e-commerce. As the demand for faster and more environmentally-friendly delivery services continues to grow, the insights from this research could help guide the development of more resilient and adaptable logistics systems.
However, the successful implementation of the VRPD-DT framework will require further validation in real-world settings and continued exploration of the broader societal and environmental impacts. Nevertheless, this paper represents an important step forward in the quest to create more efficient and sustainable delivery networks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
SmartPathfinder: Pushing the Limits of Heuristic Solutions for Vehicle Routing Problem with Drones Using Reinforcement Learning
Navid Mohammad Imran, Myounggyu Won
0
0
The Vehicle Routing Problem with Drones (VRPD) seeks to optimize the routing paths for both trucks and drones, where the trucks are responsible for delivering parcels to customer locations, and the drones are dispatched from these trucks for parcel delivery, subsequently being retrieved by the trucks. Given the NP-Hard complexity of VRPD, numerous heuristic approaches have been introduced. However, improving solution quality and reducing computation time remain significant challenges. In this paper, we conduct a comprehensive examination of heuristic methods designed for solving VRPD, distilling and standardizing them into core elements. We then develop a novel reinforcement learning (RL) framework that is seamlessly integrated with the heuristic solution components, establishing a set of universal principles for incorporating the RL framework with heuristic strategies in an aim to improve both the solution quality and computation speed. This integration has been applied to a state-of-the-art heuristic solution for VRPD, showcasing the substantial benefits of incorporating the RL framework. Our evaluation results demonstrated that the heuristic solution incorporated with our RL framework not only elevated the quality of solutions but also achieved rapid computation speeds, especially when dealing with extensive customer locations.
4/23/2024
🧠
Genetic Algorithms with Neural Cost Predictor for Solving Hierarchical Vehicle Routing Problems
Abhay Sobhanan, Junyoung Park, Jinkyoo Park, Changhyun Kwon
0
0
When vehicle routing decisions are intertwined with higher-level decisions, the resulting optimization problems pose significant challenges for computation. Examples are the multi-depot vehicle routing problem (MDVRP), where customers are assigned to depots before delivery, and the capacitated location routing problem (CLRP), where the locations of depots should be determined first. A simple and straightforward approach for such hierarchical problems would be to separate the higher-level decisions from the complicated vehicle routing decisions. For each higher-level decision candidate, we may evaluate the underlying vehicle routing problems to assess the candidate. As this approach requires solving vehicle routing problems multiple times, it has been regarded as impractical in most cases. We propose a novel deep-learning-based approach called Genetic Algorithm with Neural Cost Predictor (GANCP) to tackle the challenge and simplify algorithm developments. For each higher-level decision candidate, we predict the objective function values of the underlying vehicle routing problems using a pre-trained graph neural network without actually solving the routing problems. In particular, our proposed neural network learns the objective values of the HGS-CVRP open-source package that solves capacitated vehicle routing problems. Our numerical experiments show that this simplified approach is effective and efficient in generating high-quality solutions for both MDVRP and CLRP and has the potential to expedite algorithm developments for complicated hierarchical problems. We provide computational results evaluated in the standard benchmark instances used in the literature.
5/7/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024

Diffusion-based Reinforcement Learning for Dynamic UAV-assisted Vehicle Twins Migration in Vehicular Metaverses
Yongju Tong, Jiawen Kang, Junlong Chen, Minrui Xu, Gaolei Li, Weiting Zhang, Xincheng Yan
0
0
Air-ground integrated networks can relieve communication pressure on ground transportation networks and provide 6G-enabled vehicular Metaverses services offloading in remote areas with sparse RoadSide Units (RSUs) coverage and downtown areas where users have a high demand for vehicular services. Vehicle Twins (VTs) are the digital twins of physical vehicles to enable more immersive and realistic vehicular services, which can be offloaded and updated on RSU, to manage and provide vehicular Metaverses services to passengers and drivers. The high mobility of vehicles and the limited coverage of RSU signals necessitate VT migration to ensure service continuity when vehicles leave the signal coverage of RSUs. However, uneven VT task migration might overload some RSUs, which might result in increased service latency, and thus impactive immersive experiences for users. In this paper, we propose a dynamic Unmanned Aerial Vehicle (UAV)-assisted VT migration framework in air-ground integrated networks, where UAVs act as aerial edge servers to assist ground RSUs during VT task offloading. In this framework, we propose a diffusion-based Reinforcement Learning (RL) algorithm, which can efficiently make immersive VT migration decisions in UAV-assisted vehicular networks. To balance the workload of RSUs and improve VT migration quality, we design a novel dynamic path planning algorithm based on a heuristic search strategy for UAVs. Simulation results show that the diffusion-based RL algorithm with UAV-assisted performs better than other baseline schemes.
6/11/2024