Walking with Terrain Reconstruction: Learning to Traverse Risky Sparse Footholds

0
Sign in to get full access
Overview
- This paper presents a framework for learning to traverse risky and sparse footholds during robot walking.
- The key idea is to use terrain reconstruction techniques to model the environment and then plan safe and efficient footsteps.
- Experiments on a simulated bipedal robot demonstrate the effectiveness of the approach in navigating challenging terrain.
Plain English Explanation
The paper describes a system that allows a robot to walk across difficult terrain with sparse footholds - areas where the robot can safely place its feet. The core of the approach is using terrain reconstruction to build a detailed 3D model of the environment. The robot can then plan its footsteps based on this model to find the safest and most efficient path across the terrain.
Using Terrain Reconstruction
The robot uses sensors to scan the environment and create a 3D map of the terrain. This allows it to identify potential footholds - spots where it can safely place its feet - as well as any obstacles or hazards. By understanding the layout of the terrain, the robot can plan its steps to safely navigate across it.
Planning Footsteps
With the terrain mapped out, the robot can plan a sequence of footsteps that will allow it to traverse the challenging environment. It considers factors like the stability of each potential foothold, the energy required to reach it, and the overall efficiency of the path. This allows the robot to find a route that is both safe and minimizes the effort required to cross the terrain.
The experiments in the paper show that this approach allows a simulated bipedal robot to successfully navigate over risky and sparse footholds, demonstrating its potential for real-world applications like search and rescue or exploration of remote environments.
Technical Explanation
The paper presents a framework for learning to traverse risky and sparse footholds during robot walking. The key components of the approach are:
Learning to Traverse Risky Sparse Footholds
The system uses terrain reconstruction to build a 3D model of the environment, which is then used to plan a sequence of stable footsteps that allow the robot to navigate the challenging terrain. The terrain reconstruction module uses sensor data to create a detailed map of the environment, including the location and stability of potential footholds. The footstep planning module then uses this information to find an efficient and safe path across the terrain.
Terrain Reconstruction
The terrain reconstruction component uses sensor data from the robot's environment to build a 3D model of the terrain. This includes identifying potential footholds - areas where the robot can safely place its feet - as well as any obstacles or hazards. The model provides a detailed understanding of the environment that can be used for footstep planning.
Footstep Planning
The footstep planning module takes the 3D terrain model and optimizes a sequence of footsteps that allow the robot to safely traverse the environment. This involves considering factors like the stability of each potential foothold, the energy required to reach it, and the overall efficiency of the path. The goal is to find a route that minimizes risk and effort while still reaching the desired destination.
The experiments in the paper demonstrate the effectiveness of this approach on a simulated bipedal robot navigating challenging terrain with sparse footholds.
Critical Analysis
The paper presents a promising approach for enabling robots to traverse difficult and risky terrain, but there are a few potential limitations and areas for further research:
- The experiments are conducted in simulation, so it's unclear how well the system would perform in the real world with noisy sensor data and unpredictable environmental factors.
- The footstep planning is optimized for efficiency and stability, but doesn't explicitly consider other important factors like avoiding obstacles or adapting to unexpected events during navigation.
- The terrain reconstruction relies on sensor data, which could be unreliable or incomplete in some environments. Incorporating additional information sources, like prior maps or learning from experience, could improve the system's robustness.
- The paper doesn't address the significant challenge of transitioning from one foothold to the next in a smooth and stable manner, which is crucial for effective legged locomotion.
Overall, the research presents a strong foundation for enabling robots to traverse risky and challenging terrain, but there are several areas that could benefit from further investigation and refinement.
Conclusion
This paper introduces a framework for enabling robots to navigate across risky environments with sparse footholds. By combining terrain reconstruction and footstep planning, the system can identify safe and efficient paths across challenging terrain. The experiments demonstrate the potential of this approach, but also highlight areas for future work to improve its robustness and versatility for real-world applications. Overall, the research represents an important step forward in the field of legged robotics and autonomous navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Walking with Terrain Reconstruction: Learning to Traverse Risky Sparse Footholds
Ruiqi Yu, Qianshi Wang, Yizhen Wang, Zhicheng Wang, Jun Wu, Qiuguo Zhu
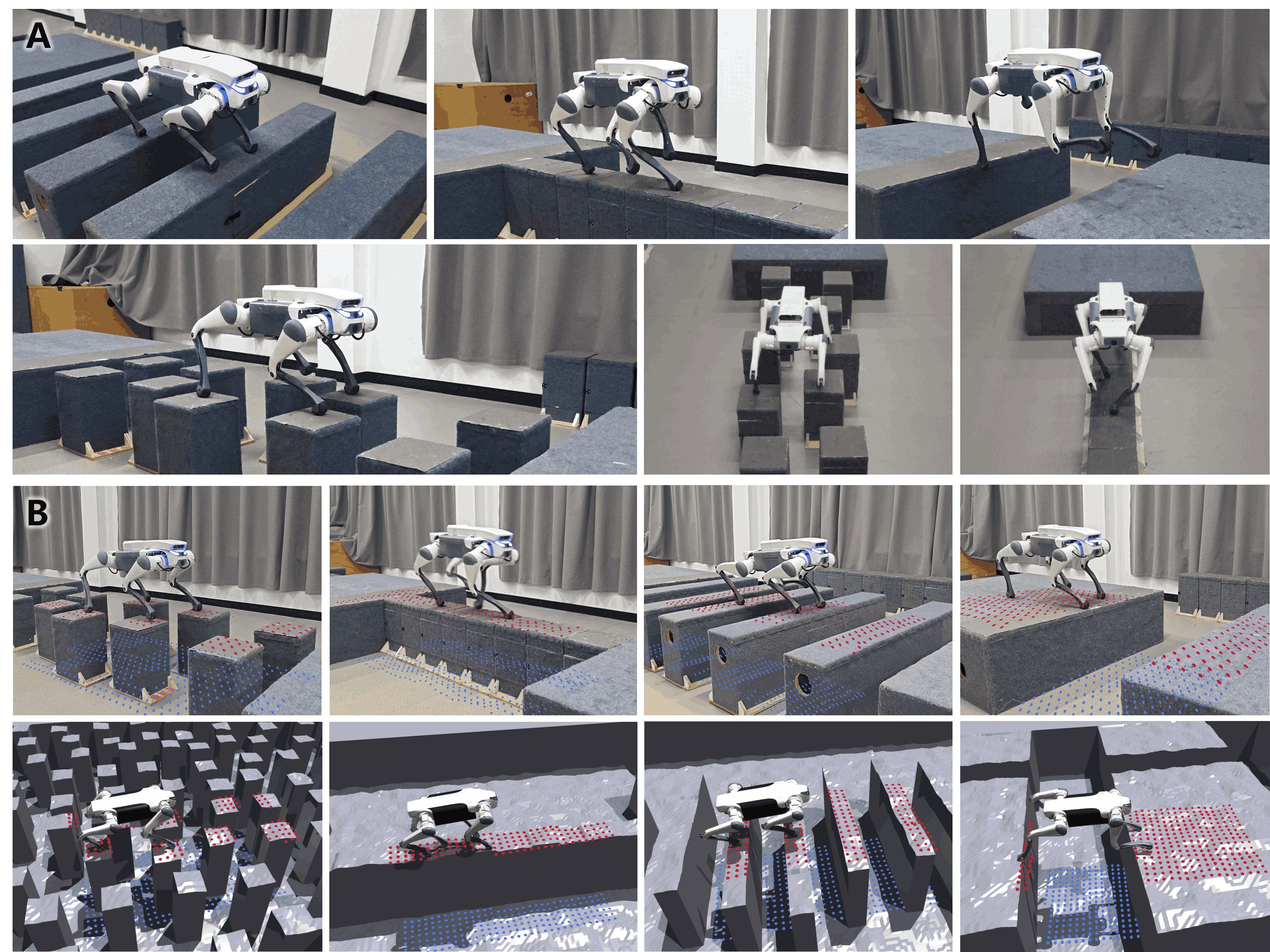
Traversing risky terrains with sparse footholds presents significant challenges for legged robots, requiring precise foot placement in safe areas. Current learning-based methods often rely on implicit feature representations without supervising physically significant estimation targets. This limits the policy's ability to fully understand complex terrain structures, which is critical for generating accurate actions. In this paper, we utilize end-to-end reinforcement learning to traverse risky terrains with high sparsity and randomness. Our approach integrates proprioception with single-view depth images to reconstruct robot's local terrain, enabling a more comprehensive representation of terrain information. Meanwhile, by incorporating implicit and explicit estimations of the robot's state and its surroundings, we improve policy's environmental understanding, leading to more precise actions. We deploy the proposed framework on a low-cost quadrupedal robot, achieving agile and adaptive locomotion across various challenging terrains and demonstrating outstanding performance in real-world scenarios. Video at: http://youtu.be/ReQAR4D6tuc.
Read more9/25/2024
🔄
0
Learning Agile Locomotion on Risky Terrains
Chong Zhang, Nikita Rudin, David Hoeller, Marco Hutter
Quadruped robots have shown remarkable mobility on various terrains through reinforcement learning. Yet, in the presence of sparse footholds and risky terrains such as stepping stones and balance beams, which require precise foot placement to avoid falls, model-based approaches are often used. In this paper, we show that end-to-end reinforcement learning can also enable the robot to traverse risky terrains with dynamic motions. To this end, our approach involves training a generalist policy for agile locomotion on disorderly and sparse stepping stones before transferring its reusable knowledge to various more challenging terrains by finetuning specialist policies from it. Given that the robot needs to rapidly adapt its velocity on these terrains, we formulate the task as a navigation task instead of the commonly used velocity tracking which constrains the robot's behavior and propose an exploration strategy to overcome sparse rewards and achieve high robustness. We validate our proposed method through simulation and real-world experiments on an ANYmal-D robot achieving peak forward velocity of >= 2.5 m/s on sparse stepping stones and narrow balance beams. Video: youtu.be/Z5X0J8OH6z4
Read more8/12/2024

0
Learning Vision-Based Bipedal Locomotion for Challenging Terrain
Helei Duan, Bikram Pandit, Mohitvishnu S. Gadde, Bart van Marum, Jeremy Dao, Chanho Kim, Alan Fern
Reinforcement learning (RL) for bipedal locomotion has recently demonstrated robust gaits over moderate terrains using only proprioceptive sensing. However, such blind controllers will fail in environments where robots must anticipate and adapt to local terrain, which requires visual perception. In this paper, we propose a fully-learned system that allows bipedal robots to react to local terrain while maintaining commanded travel speed and direction. Our approach first trains a controller in simulation using a heightmap expressed in the robot's local frame. Next, data is collected in simulation to train a heightmap predictor, whose input is the history of depth images and robot states. We demonstrate that with appropriate domain randomization, this approach allows for successful sim-to-real transfer with no explicit pose estimation and no fine-tuning using real-world data. To the best of our knowledge, this is the first example of sim-to-real learning for vision-based bipedal locomotion over challenging terrains.
Read more7/10/2024

0
Reinforcement Learning for Wheeled Mobility on Vertically Challenging Terrain
Tong Xu, Chenhui Pan, Xuesu Xiao
Off-road navigation on vertically challenging terrain, involving steep slopes and rugged boulders, presents significant challenges for wheeled robots both at the planning level to achieve smooth collision-free trajectories and at the control level to avoid rolling over or getting stuck. Considering the complex model of wheel-terrain interactions, we develop an end-to-end Reinforcement Learning (RL) system for an autonomous vehicle to learn wheeled mobility through simulated trial-and-error experiences. Using a custom-designed simulator built on the Chrono multi-physics engine, our approach leverages Proximal Policy Optimization (PPO) and a terrain difficulty curriculum to refine a policy based on a reward function to encourage progress towards the goal and penalize excessive roll and pitch angles, which circumvents the need of complex and expensive kinodynamic modeling, planning, and control. Additionally, we present experimental results in the simulator and deploy our approach on a physical Verti-4-Wheeler (V4W) platform, demonstrating that RL can equip conventional wheeled robots with previously unrealized potential of navigating vertically challenging terrain.
Read more9/5/2024