When Vision Meets Touch: A Contemporary Review for Visuotactile Sensors from the Signal Processing Perspective

0
Sign in to get full access
Overview
- This paper provides a comprehensive review of the current state of visuotactile sensors, which combine visual and tactile sensing capabilities, from a signal processing perspective.
- The paper covers the fundamental principles, sensor designs, and applications of visuotactile sensing, highlighting the key research challenges and opportunities in this rapidly evolving field.
- The review touches on the integration of visuotactile sensing with haptic feedback in teleoperated systems, the use of cross-modal perception to enable predictive tactile sensing, and the optimization of multi-touch textile tactile skins.
Plain English Explanation
Visuotactile sensors are a type of technology that combines visual and tactile (touch) sensing capabilities. These sensors can "see" and "feel" the world around them, much like human eyes and hands. This paper provides a detailed overview of the current state of this technology, focusing on how the signals from these sensors are processed and interpreted.
The paper explains the fundamental principles behind visuotactile sensing, including how the sensors are designed and how they work. It also covers a wide range of applications for this technology, such as in teleoperated (remote-controlled) systems, where the sensors can provide haptic (touch) feedback to the user, and in robotic manipulation, where the sensors can help predict and respond to tactile interactions.
The review highlights some of the key research challenges and opportunities in this field, such as improving the integration of visual and tactile information, developing more advanced signal processing algorithms, and optimizing the design of multi-touch tactile skins. By understanding these topics, researchers and developers can continue to push the boundaries of what is possible with visuotactile sensing technology.
Technical Explanation
The paper first outlines the fundamental principles of visuotactile perception, explaining how the integration of visual and tactile information can provide a more comprehensive understanding of the physical world. The authors discuss the various sensor modalities, such as cameras, force sensors, and touch-sensitive surfaces, and how they can be combined to create integrated visuotactile systems.
The review then delves into the signal processing techniques used to interpret and fuse the data from these multimodal sensors. This includes topics such as cross-modal perception, where information from one modality (e.g., vision) is used to predict and enhance the other (e.g., touch), and predictive tactile sensing, where the system can anticipate and respond to tactile interactions.
The paper also examines the various sensor designs and architectures that have been developed for visuotactile applications, including teleoperated systems and multi-touch textile tactile skins. The authors discuss the trade-offs and design considerations involved in creating these integrated sensing systems, such as spatial and temporal resolution, sensitivity, and power consumption.
Critical Analysis
The paper provides a comprehensive and well-researched overview of the state of the art in visuotactile sensing technology. However, the authors acknowledge several key limitations and areas for further research.
One notable limitation is the challenge of seamlessly integrating visual and tactile data, as the two modalities often have different spatial and temporal characteristics. The authors suggest that more advanced signal processing techniques, such as multimodal perception, will be necessary to address this issue.
The paper also highlights the need for continued improvements in sensor design, particularly in terms of flexibility, durability, and scalability. The development of optimized multi-touch textile tactile skins is an important step in this direction, but further advancements are still needed to make visuotactile sensing more robust and practical for real-world applications.
Furthermore, the authors note that the computational and power requirements of visuotactile systems can be quite demanding, which may limit their deployment in certain scenarios, such as resource-constrained environments or on-board mobile robots. Addressing these challenges will be crucial for the widespread adoption of this technology.
Conclusion
This review paper provides a comprehensive and insightful look at the current state of visuotactile sensing technology from a signal processing perspective. The authors have done an excellent job of highlighting the key principles, sensor designs, and applications of this rapidly evolving field, as well as the ongoing research challenges and opportunities.
By understanding the technical details and limitations of visuotactile sensing, researchers and developers can work to overcome the current barriers and unlock new possibilities for this technology. As visuotactile sensors continue to improve, they have the potential to revolutionize a wide range of applications, from teleoperation and robotic manipulation to assistive devices and human-computer interaction.
Overall, this paper is a valuable resource for anyone interested in the intersection of vision, touch, and signal processing, and it serves as an important reference for the ongoing development of visuotactile sensing technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
When Vision Meets Touch: A Contemporary Review for Visuotactile Sensors from the Signal Processing Perspective
Shoujie Li, Zihan Wang, Changsheng Wu, Xiang Li, Shan Luo, Bin Fang, Fuchun Sun, Xiao-Ping Zhang, Wenbo Ding
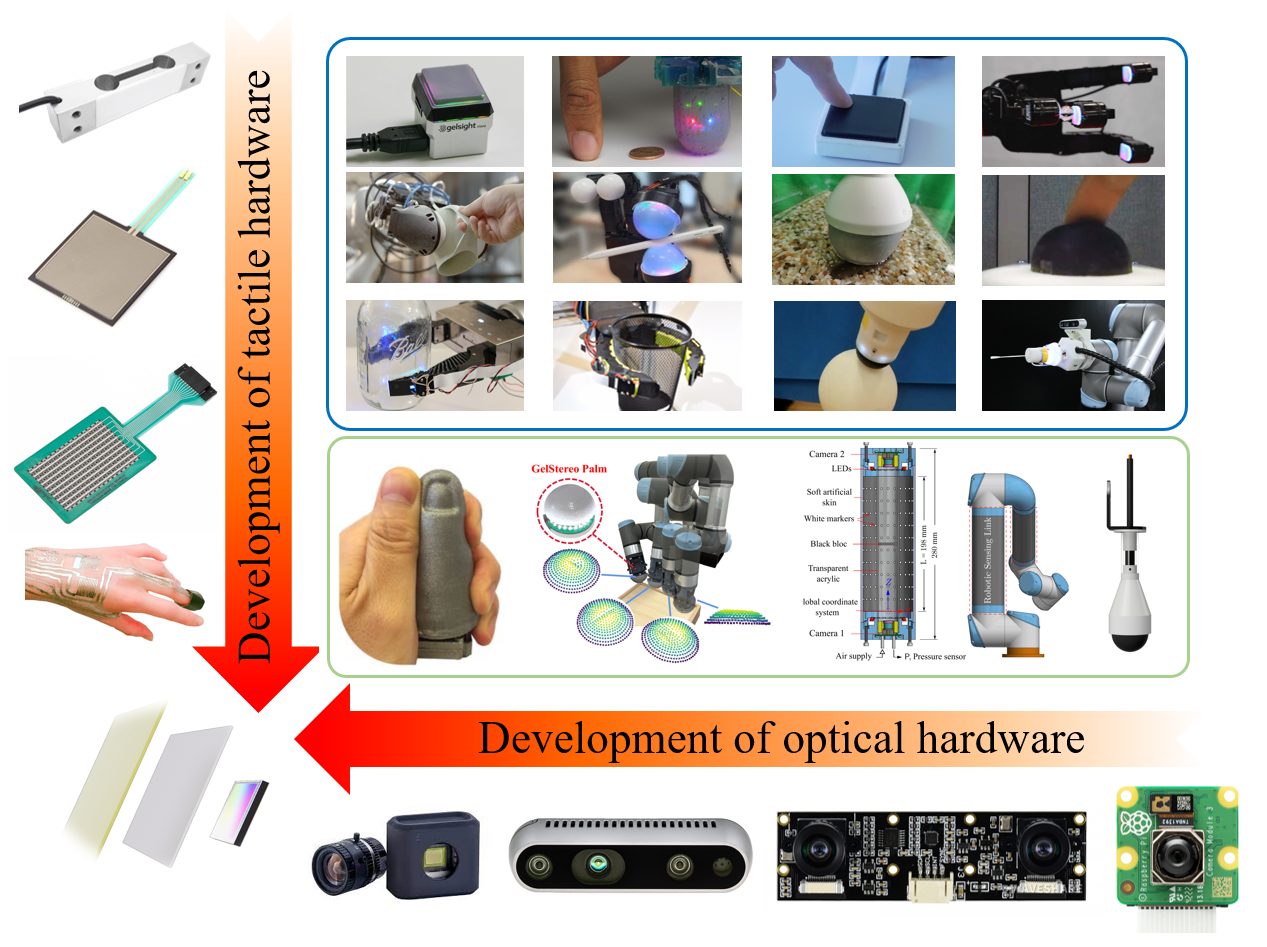
Tactile sensors, which provide information about the physical properties of objects, are an essential component of robotic systems. The visuotactile sensing technology with the merits of high resolution and low cost has facilitated the development of robotics from environment exploration to dexterous operation. Over the years, several reviews on visuotactile sensors for robots have been presented, but few of them discussed the significance of signal processing methods to visuotactile sensors. Apart from ingenious hardware design, the full potential of the sensory system toward designated tasks can only be released with the appropriate signal processing methods. Therefore, this paper provides a comprehensive review of visuotactile sensors from the perspective of signal processing methods and outlooks possible future research directions for visuotactile sensors.
Read more6/19/2024
📈
0
Integrating Visuo-tactile Sensing with Haptic Feedback for Teleoperated Robot Manipulation
Noah Becker, Erik Gattung, Kay Hansel, Tim Schneider, Yaonan Zhu, Yasuhisa Hasegawa, Jan Peters
Telerobotics enables humans to overcome spatial constraints and allows them to physically interact with the environment in remote locations. However, the sensory feedback provided by the system to the operator is often purely visual, limiting the operator's dexterity in manipulation tasks. In this work, we address this issue by equipping the robot's end-effector with high-resolution visuotactile GelSight sensors. Using low-cost MANUS-Gloves, we provide the operator with haptic feedback about forces acting at the points of contact in the form of vibration signals. We propose two different methods for estimating these forces; one based on estimating the movement of markers on the sensor surface and one deep-learning approach. Additionally, we integrate our system into a virtual-reality teleoperation pipeline in which a human operator controls both arms of a Tiago robot while receiving visual and haptic feedback. We believe that integrating haptic feedback is a crucial step for dexterous manipulation in teleoperated robotic systems.
Read more5/1/2024

0
Robot Synesthesia: In-Hand Manipulation with Visuotactile Sensing
Ying Yuan, Haichuan Che, Yuzhe Qin, Binghao Huang, Zhao-Heng Yin, Kang-Won Lee, Yi Wu, Soo-Chul Lim, Xiaolong Wang
Executing contact-rich manipulation tasks necessitates the fusion of tactile and visual feedback. However, the distinct nature of these modalities poses significant challenges. In this paper, we introduce a system that leverages visual and tactile sensory inputs to enable dexterous in-hand manipulation. Specifically, we propose Robot Synesthesia, a novel point cloud-based tactile representation inspired by human tactile-visual synesthesia. This approach allows for the simultaneous and seamless integration of both sensory inputs, offering richer spatial information and facilitating better reasoning about robot actions. The method, trained in a simulated environment and then deployed to a real robot, is applicable to various in-hand object rotation tasks. Comprehensive ablations are performed on how the integration of vision and touch can improve reinforcement learning and Sim2Real performance. Our project page is available at https://yingyuan0414.github.io/visuotactile/ .
Read more8/1/2024
📉
0
Visuo-Tactile based Predictive Cross Modal Perception for Object Exploration in Robotics
Anirvan Dutta, Etienne Burdet, Mohsen Kaboli
Autonomously exploring the unknown physical properties of novel objects such as stiffness, mass, center of mass, friction coefficient, and shape is crucial for autonomous robotic systems operating continuously in unstructured environments. We introduce a novel visuo-tactile based predictive cross-modal perception framework where initial visual observations (shape) aid in obtaining an initial prior over the object properties (mass). The initial prior improves the efficiency of the object property estimation, which is autonomously inferred via interactive non-prehensile pushing and using a dual filtering approach. The inferred properties are then used to enhance the predictive capability of the cross-modal function efficiently by using a human-inspired `surprise' formulation. We evaluated our proposed framework in the real-robotic scenario, demonstrating superior performance.
Read more5/24/2024