WROOM: An Autonomous Driving Approach for Off-Road Navigation
2404.08855
0
0

Abstract
Off-road navigation is a challenging problem both at the planning level to get a smooth trajectory and at the control level to avoid flipping over, hitting obstacles, or getting stuck at a rough patch. There have been several recent works using classical approaches involving depth map prediction followed by smooth trajectory planning and using a controller to track it. We design an end-to-end reinforcement learning (RL) system for an autonomous vehicle in off-road environments using a custom-designed simulator in the Unity game engine. We warm-start the agent by imitating a rule-based controller and utilize Proximal Policy Optimization (PPO) to improve the policy based on a reward that incorporates Control Barrier Functions (CBF), facilitating the agent's ability to generalize effectively to real-world scenarios. The training involves agents concurrently undergoing domain-randomized trials in various environments. We also propose a novel simulation environment to replicate off-road driving scenarios and deploy our proposed approach on a real buggy RC car. Videos and additional results: https://sites.google.com/view/wroom-utd/home
Create account to get full access
Overview
- The paper presents WROOM, an autonomous driving approach for off-road navigation.
- It focuses on developing a simulator to train and evaluate the autonomous driving system in challenging off-road environments.
- The approach uses a combination of perception, planning, and control modules to navigate through unstructured terrains.
Plain English Explanation
The paper describes a new system called WROOM that can autonomously drive vehicles through rough, off-road environments. Traditional self-driving cars are designed for well-paved roads, but WROOM is built to handle more challenging terrain like forests, mountains, and other natural settings.
To develop and test WROOM, the researchers created a detailed computer simulation that can model these off-road environments. This allows them to train and evaluate the system's perception, planning, and control capabilities without needing to test it in the real world. The goal is for WROOM to be able to navigate through obstacles, uneven ground, and other obstacles that would be difficult for a regular self-driving car.
By tackling off-road navigation, the WROOM system could enable new applications for autonomous vehicles, such as exploring remote areas, assisting with search and rescue operations, or supporting military and industrial missions in rugged environments. The simulation-based approach allows the researchers to thoroughly test the system and work towards making autonomous off-road driving a reality.
Technical Explanation
The paper presents the WROOM (Wilderness Robotic Off-Road Mobility) system, an autonomous driving approach designed for navigation in off-road environments. To develop and evaluate WROOM, the researchers created a detailed simulator that can model challenging terrain, environmental conditions, and other factors relevant to off-road driving.
The WROOM system consists of several key components:
- A perception module that uses sensors like cameras, LiDAR, and IMUs to detect the vehicle's surroundings and terrain features.
- A planning module that generates safe, efficient navigation paths through the off-road environment.
- A control module that translates the planned path into low-level commands to steer, accelerate, and brake the vehicle.
By training and testing WROOM in the custom simulation environment, the researchers were able to iteratively improve the system's performance on a variety of off-road scenarios without the risks and logistical challenges of real-world testing. The simulation allowed them to systematically evaluate different perception, planning, and control algorithms to find the most effective combination for autonomous off-road navigation.
Critical Analysis
The WROOM paper makes a valuable contribution by addressing the challenge of autonomous driving in unstructured, off-road environments - an area that has received less attention compared to on-road self-driving. The simulation-based approach allows for thorough testing and development of the system without the high costs and safety risks of real-world trials.
However, the paper does not provide extensive details on the specific algorithms and techniques used within the WROOM system. While the high-level architecture is described, more technical information on the perception, planning, and control components would be needed to fully evaluate the novelty and effectiveness of the approach.
Additionally, the paper does not discuss potential limitations or failure modes of the WROOM system. Real-world off-road environments can be highly dynamic and unpredictable, so further research is needed to understand how the system would handle rare or unexpected events. Validation on physical test platforms would also be important to confirm the simulation results translate to the real world.
Conclusion
The WROOM paper presents a novel autonomous driving system designed for navigation in challenging off-road environments. By developing a comprehensive simulation framework, the researchers were able to train and evaluate WROOM's perception, planning, and control capabilities without the risks and costs of real-world testing.
While the high-level approach is promising, further technical details and real-world validation would be needed to fully assess the potential of the WROOM system. Nonetheless, this work represents an important step towards expanding the capabilities of autonomous vehicles beyond just paved roads and urban settings. Successful development of off-road driving systems could enable new applications in exploration, search and rescue, and other domains where access to unstructured environments is critical.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Learning Robust Autonomous Navigation and Locomotion for Wheeled-Legged Robots
Joonho Lee, Marko Bjelonic, Alexander Reske, Lorenz Wellhausen, Takahiro Miki, Marco Hutter
0
0
Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we develop a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system's robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond.
5/6/2024
Motion planning for off-road autonomous driving based on human-like cognition and weight adaptation
Yuchun Wang, Cheng Gong, Jianwei Gong, Peng Jia
0
0
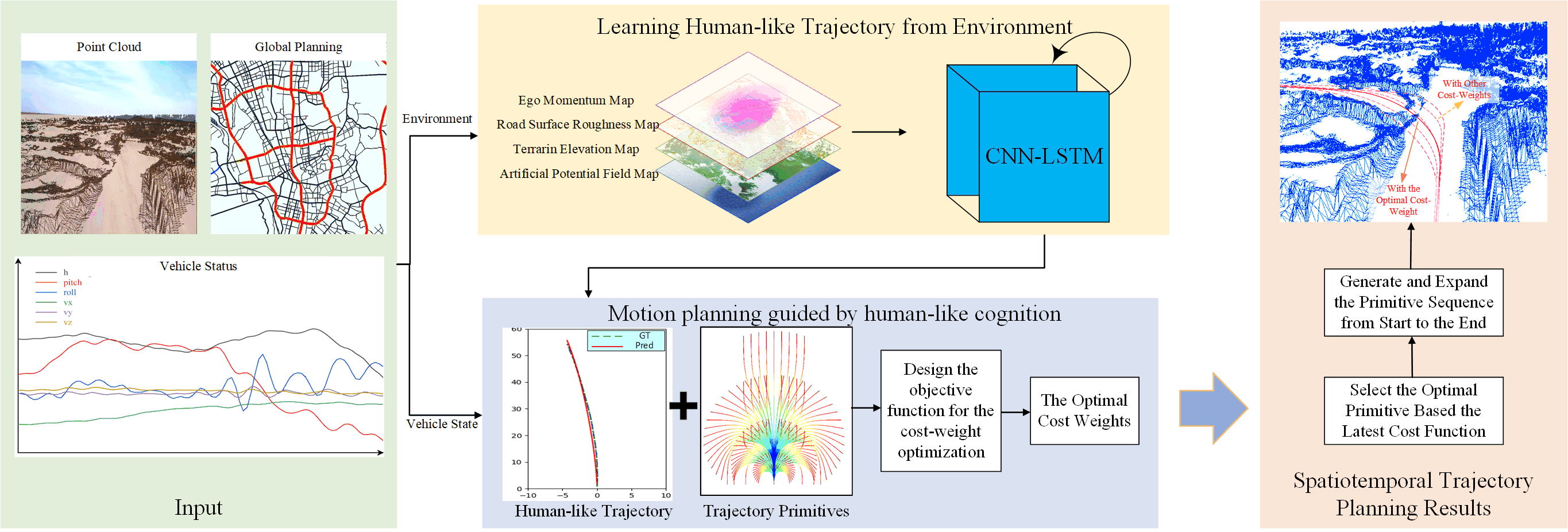
Driving in an off-road environment is challenging for autonomous vehicles due to the complex and varied terrain. To ensure stable and efficient travel, the vehicle requires consideration and balancing of environmental factors, such as undulations, roughness, and obstacles, to generate optimal trajectories that can adapt to changing scenarios. However, traditional motion planners often utilize a fixed cost function for trajectory optimization, making it difficult to adapt to different driving strategies in challenging irregular terrains and uncommon scenarios. To address these issues, we propose an adaptive motion planner based on human-like cognition and cost evaluation for off-road driving. First, we construct a multi-layer map describing different features of off-road terrains, including terrain elevation, roughness, obstacle, and artificial potential field map. Subsequently, we employ a CNN-LSTM network to learn the trajectories planned by human drivers in various off-road scenarios. Then, based on human-like generated trajectories in different environments, we design a primitive-based trajectory planner that aims to mimic human trajectories and cost weight selection, generating trajectories that are consistent with the dynamics of off-road vehicles. Finally, we compute optimal cost weights and select and extend behavioral primitives to generate highly adaptive, stable, and efficient trajectories. We validate the effectiveness of the proposed method through experiments in a desert off-road environment with complex terrain and varying road conditions. The experimental results show that the proposed human-like motion planner has excellent adaptability to different off-road conditions. It shows real-time operation, greater stability, and more human-like planning ability in diverse and challenging scenarios.
4/30/2024
Deep Reinforcement Learning with Enhanced PPO for Safe Mobile Robot Navigation
Hamid Taheri, Seyed Rasoul Hosseini
0
0
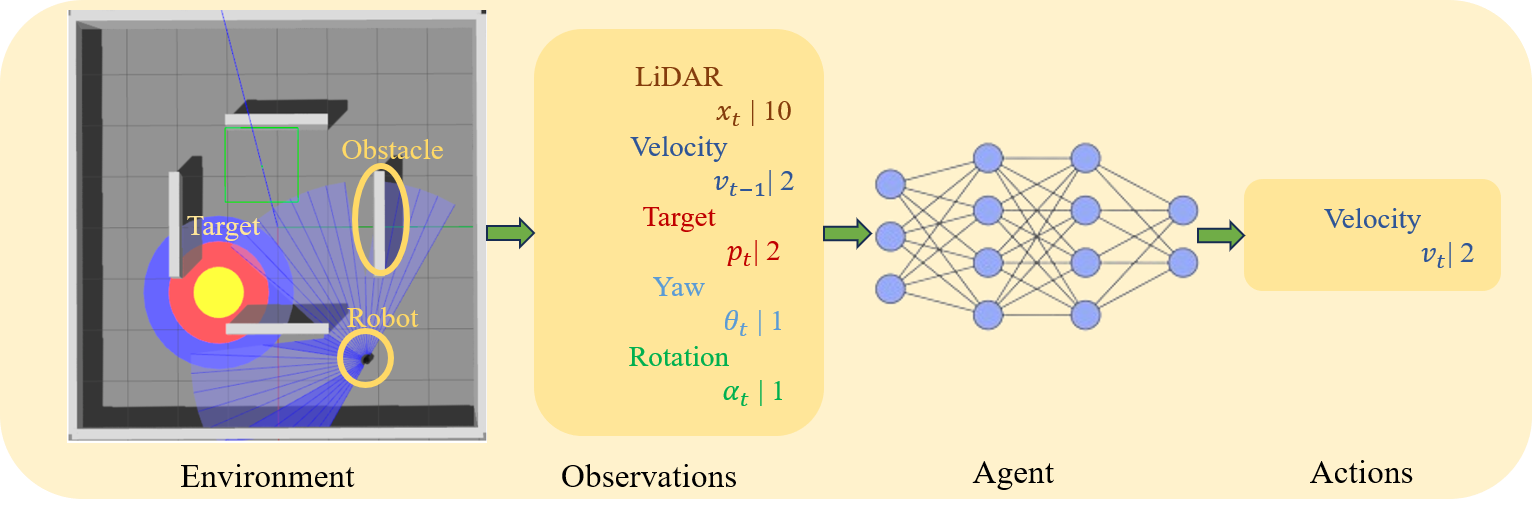
Collision-free motion is essential for mobile robots. Most approaches to collision-free and efficient navigation with wheeled robots require parameter tuning by experts to obtain good navigation behavior. This study investigates the application of deep reinforcement learning to train a mobile robot for autonomous navigation in a complex environment. The robot utilizes LiDAR sensor data and a deep neural network to generate control signals guiding it toward a specified target while avoiding obstacles. We employ two reinforcement learning algorithms in the Gazebo simulation environment: Deep Deterministic Policy Gradient and proximal policy optimization. The study introduces an enhanced neural network structure in the Proximal Policy Optimization algorithm to boost performance, accompanied by a well-designed reward function to improve algorithm efficacy. Experimental results conducted in both obstacle and obstacle-free environments underscore the effectiveness of the proposed approach. This research significantly contributes to the advancement of autonomous robotics in complex environments through the application of deep reinforcement learning.
5/28/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024