3D Whole-body Grasp Synthesis with Directional Controllability

0

Sign in to get full access
Overview
- This paper presents a method for synthesizing 3D whole-body grasps with directional controllability.
- The key contributions include:
- A neural network architecture that can generate diverse and stable whole-body grasps.
- Ability to control the grasp direction and orientation.
- Extensive evaluation on a large dataset of 3D objects.
Plain English Explanation
The paper describes a system that can generate 3D models of how a human hand and arm would grasp different objects. This allows for more realistic and versatile grasping motions compared to previous approaches.
The system uses a neural network to analyze the shape of an object and then output a 3D model of how a human hand and arm would grasp that object. Importantly, the system can also control the direction and orientation of the grasp, giving the user more flexibility in how the object is grasped.
The researchers tested their system on a large dataset of 3D objects and found that it could generate diverse and stable grasping motions. This suggests the system could be useful for applications like robotics, animation, and virtual reality, where realistic and controllable grasping is important.
Technical Explanation
The paper presents a neural network architecture that takes a 3D object mesh as input and generates a full 3D model of a whole-body grasp. This includes the position and orientation of the hand, as well as the joint angles of the fingers and arm.
The key innovation is the ability to control the direction and orientation of the generated grasp. This is achieved by conditioning the network on additional input vectors that specify the desired grasp direction and orientation. The network then learns to generate grasping motions that satisfy these constraints.
The network is trained and evaluated on a large dataset of 3D object meshes and corresponding ground truth grasping motions. Experiments show that the system can generate diverse, stable, and directionally controllable grasping motions across a wide variety of object shapes.
Critical Analysis
The paper provides a compelling approach to generating realistic 3D grasping motions with directional control. However, some potential limitations and areas for future work are:
- The dataset used for training and evaluation, while large, may not capture the full diversity of real-world objects. Expanding the dataset or using few-shot learning techniques could improve generalization.
- The current system generates static grasping poses, but extending it to also generate dynamic grasping motions could be valuable for applications like robotics and animation.
- Incorporating physical simulation to ensure the generated grasps are physically feasible may further improve the realism and stability of the results.
Overall, this paper presents an important step forward in whole-body grasp synthesis and highlights the value of direction and orientation control for practical applications.
Conclusion
This paper introduces a novel neural network architecture for 3D whole-body grasp synthesis that enables directional controllability. The system can generate diverse and stable grasping motions across a wide variety of 3D objects, making it a promising tool for robotics, animation, and virtual reality applications where realistic and flexible grasping is crucial. While the current system has some limitations, the work represents an important advancement in the field of grasp synthesis.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
3D Whole-body Grasp Synthesis with Directional Controllability
Georgios Paschalidis, Romana Wilschut, Dimitrije Anti'c, Omid Taheri, Dimitrios Tzionas
Synthesizing 3D whole-bodies that realistically grasp objects is useful for animation, mixed reality, and robotics. This is challenging, because the hands and body need to look natural w.r.t. each other, the grasped object, as well as the local scene (i.e., a receptacle supporting the object). Only recent work tackles this, with a divide-and-conquer approach; it first generates a guiding right-hand grasp, and then searches for bodies that match this. However, the guiding-hand synthesis lacks controllability and receptacle awareness, so it likely has an implausible direction (i.e., a body can't match this without penetrating the receptacle) and needs corrections through major post-processing. Moreover, the body search needs exhaustive sampling and is expensive. These are strong limitations. We tackle these with a novel method called CWGrasp. Our key idea is that performing geometry-based reasoning early on, instead of too late, provides rich control signals for inference. To this end, CWGrasp first samples a plausible reaching-direction vector (used later for both the arm and hand) from a probabilistic model built via raycasting from the object and collision checking. Then, it generates a reaching body with a desired arm direction, as well as a guiding grasping hand with a desired palm direction that complies with the arm's one. Eventually, CWGrasp refines the body to match the guiding hand, while plausibly contacting the scene. Notably, generating already-compatible parts greatly simplifies the whole. Moreover, CWGrasp uniquely tackles both right- and left-hand grasps. We evaluate on the GRAB and ReplicaGrasp datasets. CWGrasp outperforms baselines, at lower runtime and budget, while all components help performance. Code and models will be released.
Read more8/30/2024
0
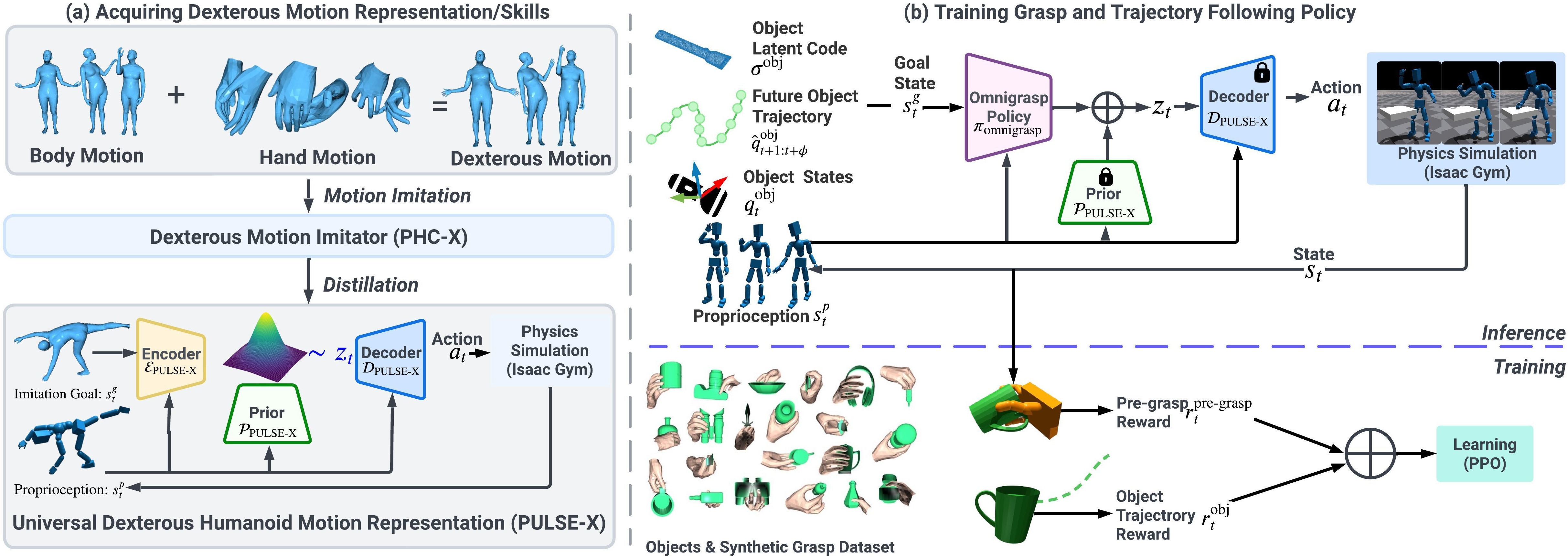
Grasping Diverse Objects with Simulated Humanoids
Zhengyi Luo, Jinkun Cao, Sammy Christen, Alexander Winkler, Kris Kitani, Weipeng Xu
We present a method for controlling a simulated humanoid to grasp an object and move it to follow an object trajectory. Due to the challenges in controlling a humanoid with dexterous hands, prior methods often use a disembodied hand and only consider vertical lifts or short trajectories. This limited scope hampers their applicability for object manipulation required for animation and simulation. To close this gap, we learn a controller that can pick up a large number (>1200) of objects and carry them to follow randomly generated trajectories. Our key insight is to leverage a humanoid motion representation that provides human-like motor skills and significantly speeds up training. Using only simplistic reward, state, and object representations, our method shows favorable scalability on diverse object and trajectories. For training, we do not need dataset of paired full-body motion and object trajectories. At test time, we only require the object mesh and desired trajectories for grasping and transporting. To demonstrate the capabilities of our method, we show state-of-the-art success rates in following object trajectories and generalizing to unseen objects. Code and models will be released.
Read more7/17/2024

0
GenHeld: Generating and Editing Handheld Objects
Chaerin Min, Srinath Sridhar
Grasping is an important human activity that has long been studied in robotics, computer vision, and cognitive science. Most existing works study grasping from the perspective of synthesizing hand poses conditioned on 3D or 2D object representations. We propose GenHeld to address the inverse problem of synthesizing held objects conditioned on 3D hand model or 2D image. Given a 3D model of hand, GenHeld 3D can select a plausible held object from a large dataset using compact object representations called object codes.The selected object is then positioned and oriented to form a plausible grasp without changing hand pose. If only a 2D hand image is available, GenHeld 2D can edit this image to add or replace a held object. GenHeld 2D operates by combining the abilities of GenHeld 3D with diffusion-based image editing. Results and experiments show that we outperform baselines and can generate plausible held objects in both 2D and 3D. Our experiments demonstrate that our method achieves high quality and plausibility of held object synthesis in both 3D and 2D.
Read more6/18/2024

0
GraspXL: Generating Grasping Motions for Diverse Objects at Scale
Hui Zhang, Sammy Christen, Zicong Fan, Otmar Hilliges, Jie Song
Human hands possess the dexterity to interact with diverse objects such as grasping specific parts of the objects and/or approaching them from desired directions. More importantly, humans can grasp objects of any shape without object-specific skills. Recent works synthesize grasping motions following single objectives such as a desired approach heading direction or a grasping area. Moreover, they usually rely on expensive 3D hand-object data during training and inference, which limits their capability to synthesize grasping motions for unseen objects at scale. In this paper, we unify the generation of hand-object grasping motions across multiple motion objectives, diverse object shapes and dexterous hand morphologies in a policy learning framework GraspXL. The objectives are composed of the graspable area, heading direction during approach, wrist rotation, and hand position. Without requiring any 3D hand-object interaction data, our policy trained with 58 objects can robustly synthesize diverse grasping motions for more than 500k unseen objects with a success rate of 82.2%. At the same time, the policy adheres to objectives, which enables the generation of diverse grasps per object. Moreover, we show that our framework can be deployed to different dexterous hands and work with reconstructed or generated objects. We quantitatively and qualitatively evaluate our method to show the efficacy of our approach. Our model, code, and the large-scale generated motions are available at https://eth-ait.github.io/graspxl/.
Read more7/15/2024