3DMambaComplete: Exploring Structured State Space Model for Point Cloud Completion

0
Sign in to get full access
Overview
- This paper introduces 3DMambaComplete, a novel approach to point cloud completion that leverages a structured state space model.
- The method aims to generate plausible completions for partially observed 3D point clouds by modeling the underlying structure and dynamics of object shapes.
- The paper explores the use of a state space formulation to capture the inherent spatial and temporal dependencies in point cloud data, enabling more accurate and coherent completion results.
Plain English Explanation
3DMambaComplete is a new technique for filling in missing parts of 3D point cloud data. Point clouds are digital representations of 3D objects or environments, made up of a collection of individual data points. However, point cloud data is often incomplete, with some parts of the object or scene missing.
The researchers behind 3DMambaComplete have developed a way to accurately predict what the missing parts should look like, based on the available information. Their key insight is to model the point cloud data using a "state space" approach, which means treating the 3D shape as a dynamic system with underlying structure and patterns.
By capturing these structural and temporal relationships in the point cloud, 3DMambaComplete can generate plausible completions that are consistent with the observed data. This is a significant advancement over previous point cloud completion methods, which often struggled to produce realistic and coherent results for complex 3D shapes.
The potential applications of 3DMambaComplete include 3D reconstruction, autonomous navigation, and virtual/augmented reality, where having complete and accurate 3D models is essential. The structured state space approach introduced in this paper could also be applicable to other 3D data processing tasks, such as PointMamba, 3DMambaIPF, MambaAD, and RS3Mamba.
Technical Explanation
The key innovation of 3DMambaComplete is the use of a structured state space model to represent and complete 3D point cloud data. The state space formulation allows the method to capture the inherent spatial and temporal dependencies in the shape of the 3D object, which is crucial for generating coherent and realistic completions.
The 3DMambaComplete architecture consists of several main components:
- Encoder: This module takes the partial point cloud as input and encodes it into a compact latent representation that captures the underlying structure and dynamics of the 3D shape.
- State Space Model: This component models the evolution of the latent state over time, using a recurrent neural network to predict the next state given the current one.
- Decoder: The decoder takes the predicted latent states and generates the completed point cloud, filling in the missing parts based on the learned shape priors.
The researchers train the 3DMambaComplete model end-to-end using a combination of reconstruction and adversarial losses, which encourage the generated completions to be both accurate and plausible. They also introduce novel architectural choices, such as attention mechanisms and residual connections, to improve the model's performance.
Experiments on standard point cloud completion benchmarks demonstrate that 3DMambaComplete outperforms previous state-of-the-art methods, particularly for complex 3D shapes with significant occlusions or missing data. The structured state space formulation proves to be a powerful tool for modeling the underlying geometry and dynamics of point clouds, leading to more coherent and visually appealing completion results.
Critical Analysis
The 3DMambaComplete paper presents a compelling approach to point cloud completion, but there are a few potential limitations and areas for further research:
- Computational Complexity: The state space model and recurrent neural network components of 3DMambaComplete may incur higher computational costs compared to more straightforward completion methods. The authors do not provide a detailed analysis of the model's runtime or memory requirements.
- Generalization to Unseen Categories: The paper focuses on evaluating 3DMambaComplete on common 3D object categories, such as chairs and tables. It would be interesting to see how the method performs on more diverse or unconventional 3D shapes, which may require further architectural adaptations.
- Handling Noise and Outliers: The paper does not explicitly address the robustness of 3DMambaComplete to noisy or corrupted input point clouds. Developing techniques to handle such real-world challenges would be an important next step.
Despite these potential areas for improvement, the 3DMambaComplete paper represents a significant advancement in point cloud completion research, with its innovative use of structured state space modeling. The authors have demonstrated the effectiveness of this approach, and the insights from this work could inspire further developments in 3D data processing and generative modeling.
Conclusion
The 3DMambaComplete paper presents a novel approach to point cloud completion that leverages a structured state space model to capture the inherent spatial and temporal dependencies in 3D shape data. By modeling the point cloud as a dynamic system, the method can generate plausible completions that are both accurate and coherent, outperforming previous state-of-the-art techniques.
The potential impact of 3DMambaComplete extends beyond point cloud completion, as the structured state space formulation could be applied to a variety of 3D data processing tasks, such as reconstruction, iterative refinement, multi-class segmentation, and remote sensing. The insights from this research could contribute to the development of more robust and versatile 3D data processing pipelines, with far-reaching applications in areas such as autonomous navigation, virtual/augmented reality, and digital twinning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
3DMambaComplete: Exploring Structured State Space Model for Point Cloud Completion
Yixuan Li, Weidong Yang, Ben Fei
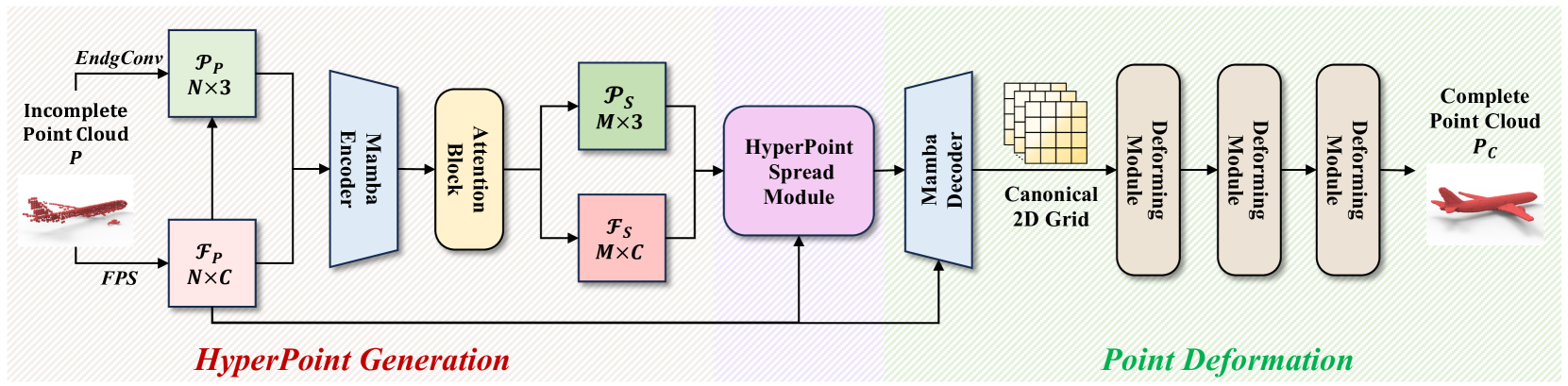
Point cloud completion aims to generate a complete and high-fidelity point cloud from an initially incomplete and low-quality input. A prevalent strategy involves leveraging Transformer-based models to encode global features and facilitate the reconstruction process. However, the adoption of pooling operations to obtain global feature representations often results in the loss of local details within the point cloud. Moreover, the attention mechanism inherent in Transformers introduces additional computational complexity, rendering it challenging to handle long sequences effectively. To address these issues, we propose 3DMambaComplete, a point cloud completion network built on the novel Mamba framework. It comprises three modules: HyperPoint Generation encodes point cloud features using Mamba's selection mechanism and predicts a set of Hyperpoints. A specific offset is estimated, and the down-sampled points become HyperPoints. The HyperPoint Spread module disperses these HyperPoints across different spatial locations to avoid concentration. Finally, a deformation method transforms the 2D mesh representation of HyperPoints into a fine-grained 3D structure for point cloud reconstruction. Extensive experiments conducted on various established benchmarks demonstrate that 3DMambaComplete surpasses state-of-the-art point cloud completion methods, as confirmed by qualitative and quantitative analyses.
Read more4/11/2024
📈
0
Mamba3D: Enhancing Local Features for 3D Point Cloud Analysis via State Space Model
Xu Han, Yuan Tang, Zhaoxuan Wang, Xianzhi Li
Existing Transformer-based models for point cloud analysis suffer from quadratic complexity, leading to compromised point cloud resolution and information loss. In contrast, the newly proposed Mamba model, based on state space models (SSM), outperforms Transformer in multiple areas with only linear complexity. However, the straightforward adoption of Mamba does not achieve satisfactory performance on point cloud tasks. In this work, we present Mamba3D, a state space model tailored for point cloud learning to enhance local feature extraction, achieving superior performance, high efficiency, and scalability potential. Specifically, we propose a simple yet effective Local Norm Pooling (LNP) block to extract local geometric features. Additionally, to obtain better global features, we introduce a bidirectional SSM (bi-SSM) with both a token forward SSM and a novel backward SSM that operates on the feature channel. Extensive experimental results show that Mamba3D surpasses Transformer-based counterparts and concurrent works in multiple tasks, with or without pre-training. Notably, Mamba3D achieves multiple SoTA, including an overall accuracy of 92.6% (train from scratch) on the ScanObjectNN and 95.1% (with single-modal pre-training) on the ModelNet40 classification task, with only linear complexity. Our code and weights are available at https://github.com/xhanxu/Mamba3D.
Read more9/4/2024

0
Point Cloud Mamba: Point Cloud Learning via State Space Model
Tao Zhang, Xiangtai Li, Haobo Yuan, Shunping Ji, Shuicheng Yan
Recently, state space models have exhibited strong global modeling capabilities and linear computational complexity in contrast to transformers. This research focuses on applying such architecture in point cloud analysis. In particular, for the first time, we demonstrate that Mamba-based point cloud methods can outperform previous methods based on transformer or multi-layer perceptrons (MLPs). To enable Mamba to process 3-D point cloud data more effectively, we propose a novel Consistent Traverse Serialization method to convert point clouds into 1-D point sequences while ensuring that neighboring points in the sequence are also spatially adjacent. Consistent Traverse Serialization yields six variants by permuting the order of x, y, and z coordinates, and the synergistic use of these variants aids Mamba in comprehensively observing point cloud data. Furthermore, to assist Mamba in handling point sequences with different orders more effectively, we introduce point prompts to inform Mamba of the sequence's arrangement rules. Finally, we propose positional encoding based on spatial coordinate mapping to inject positional information into point cloud sequences better. Point Cloud Mamba surpasses the state-of-the-art (SOTA) point-based method PointNeXt and achieves new SOTA performance on the ScanObjectNN, ModelNet40, ShapeNetPart, and S3DIS datasets. It is worth mentioning that when using a more powerful local feature extraction module, our PCM achieves 82.6 mIoU on S3DIS, significantly surpassing the previous SOTA models, DeLA and PTv3, by 8.5 mIoU and 7.9 mIoU, respectively. Code and model are available at https://github.com/SkyworkAI/PointCloudMamba.
Read more5/31/2024
📈
0
PointMamba: A Simple State Space Model for Point Cloud Analysis
Dingkang Liang, Xin Zhou, Wei Xu, Xingkui Zhu, Zhikang Zou, Xiaoqing Ye, Xiao Tan, Xiang Bai
Transformers have become one of the foundational architectures in point cloud analysis tasks due to their excellent global modeling ability. However, the attention mechanism has quadratic complexity, making the design of a linear complexity method with global modeling appealing. In this paper, we propose PointMamba, transferring the success of Mamba, a recent representative state space model (SSM), from NLP to point cloud analysis tasks. Unlike traditional Transformers, PointMamba employs a linear complexity algorithm, presenting global modeling capacity while significantly reducing computational costs. Specifically, our method leverages space-filling curves for effective point tokenization and adopts an extremely simple, non-hierarchical Mamba encoder as the backbone. Comprehensive evaluations demonstrate that PointMamba achieves superior performance across multiple datasets while significantly reducing GPU memory usage and FLOPs. This work underscores the potential of SSMs in 3D vision-related tasks and presents a simple yet effective Mamba-based baseline for future research. The code is available at https://github.com/LMD0311/PointMamba.
Read more5/30/2024