Accurately Predicting Probabilities of Safety-Critical Rare Events for Intelligent Systems

0
Sign in to get full access
Overview
- This paper proposes a novel approach to accurately predicting probabilities of safety-critical rare events for intelligent systems.
- The researchers developed a method to address the challenge of reliably estimating the likelihood of extremely rare but high-impact events in AI systems.
- The method combines advanced statistical techniques and machine learning to enable more robust safety predictions.
Plain English Explanation
Intelligent systems like self-driving cars or AI assistants need to be able to accurately predict the chances of rare but dangerous events happening, such as a car accident or system failure. This is crucial for ensuring the safety and reliability of these systems. However, estimating the probabilities of such rare occurrences is extremely difficult using traditional methods.
The researchers in this paper have developed a new approach to address this challenge. Their method combines advanced statistical analysis and machine learning to provide more accurate predictions of the likelihood of these safety-critical rare events. By leveraging sophisticated techniques, the system is better able to model the complex factors and uncertainties involved, leading to more robust and trustworthy safety assessments.
This research could have important implications for the development of safe and reliable intelligent systems across a variety of domains, from self-driving cars to medical diagnosis to industrial automation. By improving our ability to foresee and mitigate rare but high-impact failures, this work helps pave the way for AI systems that can be deployed with greater confidence in their safety.
Technical Explanation
The paper proposes a novel framework for accurately predicting probabilities of safety-critical rare events for intelligent systems. The key innovation is the integration of advanced statistical techniques and machine learning to enable more robust estimation of the likelihood of extremely rare but high-impact events.
The researchers formulate the problem as a Bayesian inference task, where the goal is to infer the underlying probability distribution of safety-critical events given limited observational data. They develop a hierarchical Bayesian model that captures the complex dependencies and uncertainties involved. This model is then coupled with a deep learning-based approach to learn the relevant features and patterns from data.
The proposed method is evaluated on several benchmark tasks, including simulated autonomous vehicle scenarios and real-world industrial process data. The results demonstrate significant improvements in predictive accuracy compared to existing techniques, particularly for the rarest and most consequential events.
Critical Analysis
The paper presents a compelling approach to a challenging problem in AI safety. By integrating advanced statistical modeling and machine learning, the researchers have developed a more robust framework for estimating the probabilities of safety-critical rare events.
One potential limitation is the reliance on simulation and synthetic data for a portion of the evaluation. While the real-world industrial data provides valuable insights, further validation on diverse, real-world intelligent systems would strengthen the generalizability of the findings.
Additionally, the paper does not extensively discuss the computational complexity and scalability of the proposed method. As intelligent systems grow in scale and complexity, ensuring the efficiency and tractability of the safety assessment process will be crucial.
Nevertheless, this work represents an important step forward in addressing a critical challenge for the safe deployment of AI systems. By improving our ability to predict and mitigate rare failures, the researchers have laid the groundwork for more trustworthy and reliable intelligent systems that can be confidently deployed in high-stakes applications.
Conclusion
The paper presents a novel approach for accurately predicting the probabilities of safety-critical rare events in intelligent systems. By combining advanced statistical techniques and machine learning, the researchers have developed a more robust framework for estimating the likelihood of extremely rare but high-impact failures.
This work has important implications for the development of safe and reliable AI systems across a variety of domains, from autonomous vehicles to industrial automation. By improving our ability to foresee and mitigate rare but catastrophic events, the proposed method helps pave the way for intelligent systems that can be deployed with greater confidence in their safety and reliability.
While the paper identifies some areas for further research, such as expanded real-world validation and computational efficiency, the core contribution represents a significant advancement in the field of AI safety. As the deployment of intelligent systems becomes increasingly widespread, the ability to accurately predict and manage safety-critical risks will be crucial for ensuring the responsible and beneficial development of these transformative technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Accurately Predicting Probabilities of Safety-Critical Rare Events for Intelligent Systems
Ruoxuan Bai, Jingxuan Yang, Weiduo Gong, Yi Zhang, Qiujing Lu, Shuo Feng
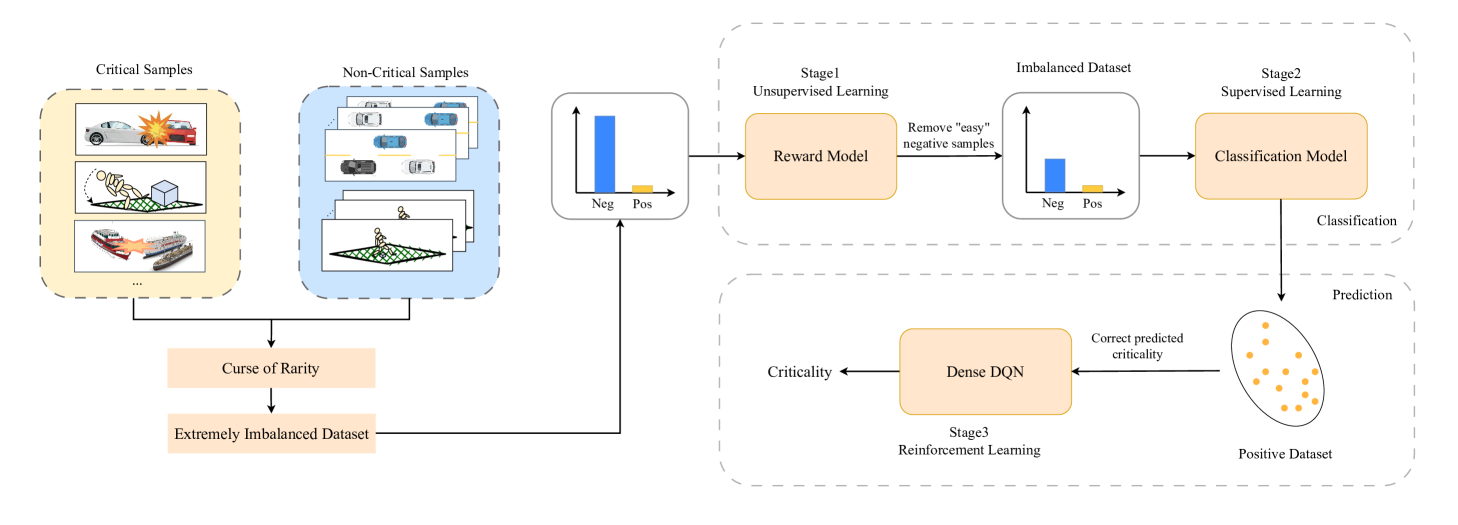
Intelligent systems are increasingly integral to our daily lives, yet rare safety-critical events present significant latent threats to their practical deployment. Addressing this challenge hinges on accurately predicting the probability of safety-critical events occurring within a given time step from the current state, a metric we define as 'criticality'. The complexity of predicting criticality arises from the extreme data imbalance caused by rare events in high dimensional variables associated with the rare events, a challenge we refer to as the curse of rarity. Existing methods tend to be either overly conservative or prone to overlooking safety-critical events, thus struggling to achieve both high precision and recall rates, which severely limits their applicability. This study endeavors to develop a criticality prediction model that excels in both precision and recall rates for evaluating the criticality of safety-critical autonomous systems. We propose a multi-stage learning framework designed to progressively densify the dataset, mitigating the curse of rarity across stages. To validate our approach, we evaluate it in two cases: lunar lander and bipedal walker scenarios. The results demonstrate that our method surpasses traditional approaches, providing a more accurate and dependable assessment of criticality in intelligent systems.
Read more4/8/2024
🏅
0
New!Criticality and Safety Margins for Reinforcement Learning
Alexander Grushin, Walt Woods, Alvaro Velasquez, Simon Khan
State of the art reinforcement learning methods sometimes encounter unsafe situations. Identifying when these situations occur is of interest both for post-hoc analysis and during deployment, where it might be advantageous to call out to a human overseer for help. Efforts to gauge the criticality of different points in time have been developed, but their accuracy is not well established due to a lack of ground truth, and they are not designed to be easily interpretable by end users. Therefore, we seek to define a criticality framework with both a quantifiable ground truth and a clear significance to users. We introduce true criticality as the expected drop in reward when an agent deviates from its policy for n consecutive random actions. We also introduce the concept of proxy criticality, a low-overhead metric that has a statistically monotonic relationship to true criticality. Safety margins make these interpretable, when defined as the number of random actions for which performance loss will not exceed some tolerance with high confidence. We demonstrate this approach in several environment-agent combinations; for an A3C agent in an Atari Beamrider environment, the lowest 5% of safety margins contain 47% of agent losses; i.e., supervising only 5% of decisions could potentially prevent roughly half of an agent's errors. This criticality framework measures the potential impacts of bad decisions, even before those decisions are made, allowing for more effective debugging and oversight of autonomous agents.
Read more9/30/2024
🔮
0
Risk-Aware Vehicle Trajectory Prediction Under Safety-Critical Scenarios
Qingfan Wang, Dongyang Xu, Gaoyuan Kuang, Chen Lv, Shengbo Eben Li, Bingbing Nie
Trajectory prediction is significant for intelligent vehicles to achieve high-level autonomous driving, and a lot of relevant research achievements have been made recently. Despite the rapid development, most existing studies solely focused on normal safe scenarios while largely neglecting safety-critical scenarios, particularly those involving imminent collisions. This oversight may result in autonomous vehicles lacking the essential predictive ability in such situations, posing a significant threat to safety. To tackle these, this paper proposes a risk-aware trajectory prediction framework tailored to safety-critical scenarios. Leveraging distinctive hazardous features, we develop three core risk-aware components. First, we introduce a risk-incorporated scene encoder, which augments conventional encoders with quantitative risk information to achieve risk-aware encoding of hazardous scene contexts. Next, we incorporate endpoint-risk-combined intention queries as prediction priors in the decoder to ensure that the predicted multimodal trajectories cover both various spatial intentions and risk levels. Lastly, an auxiliary risk prediction task is implemented for the ultimate risk-aware prediction. Furthermore, to support model training and performance evaluation, we introduce a safety-critical trajectory prediction dataset and tailored evaluation metrics. We conduct comprehensive evaluations and compare our model with several SOTA models. Results demonstrate the superior performance of our model, with a significant improvement in most metrics. This prediction advancement enables autonomous vehicles to execute correct collision avoidance maneuvers under safety-critical scenarios, eventually enhancing road traffic safety.
Read more7/19/2024
🏷️
0
Bias Correction in Machine Learning-based Classification of Rare Events
Luuk Gubbels, Marco Puts, Piet Daas
Online platform businesses can be identified by using web-scraped texts. This is a classification problem that combines elements of natural language processing and rare event detection. Because online platforms are rare, accurately identifying them with Machine Learning algorithms is challenging. Here, we describe the development of a Machine Learning-based text classification approach that reduces the number of false positives as much as possible. It greatly reduces the bias in the estimates obtained by using calibrated probabilities and ensembles.
Read more7/10/2024