Adapting a Foundation Model for Space-based Tasks

0

Sign in to get full access
Overview
- The paper explores how to adapt a foundation model, a large pre-trained neural network, for space-based tasks.
- It investigates the challenges and opportunities in using these models, which are primarily trained on internet data, in the space domain.
- The research aims to understand how foundation models can be leveraged for space applications and what modifications may be necessary.
Plain English Explanation
Foundation models are powerful AI systems that have been trained on massive datasets, allowing them to perform a wide variety of tasks. Adapting a Foundation Model for Space-based Tasks explores how these models can be used for space-related applications, such as analyzing satellite imagery or controlling spacecraft.
The key challenge is that foundation models are typically trained on data from the internet, which may not fully capture the unique characteristics of the space environment. The paper investigates the potential obstacles and opportunities in using these models for space-based tasks. For example, foundation models may need to be fine-tuned or adapted to handle the different types of data and challenges encountered in space, such as dealing with limited connectivity or operating in harsh conditions.
By understanding how to effectively leverage foundation models for space applications, the research aims to unlock new capabilities and efficiencies in areas like satellite operations, planetary exploration, and space-based scientific research. The insights from this work could help bridge the gap between the powerful AI technologies developed for the internet and the specialized needs of the space domain.
Technical Explanation
The paper Adapting a Foundation Model for Space-based Tasks explores the potential of using foundation models, which are large pre-trained neural networks, for a variety of space-based applications. Foundation models have demonstrated impressive performance on a wide range of tasks, but their use in the space domain has not been extensively studied.
The researchers investigate the unique challenges and opportunities that arise when adapting foundation models for space-based tasks. These models are typically trained on internet data, which may not fully capture the characteristics of the space environment, such as the limited connectivity, harsh conditions, and specialized data formats. The paper examines strategies for fine-tuning or adapting foundation models to address these domain-specific requirements.
The researchers also explore the potential benefits of using foundation models in the space domain, such as improved efficiency, reduced development time, and the ability to leverage the rich knowledge and capabilities encoded in these models. By understanding how to effectively utilize foundation models for space applications, the research aims to unlock new possibilities in areas like satellite operations, planetary exploration, and space-based scientific research.
Critical Analysis
The Adapting a Foundation Model for Space-based Tasks paper provides a valuable exploration of the potential and challenges in using foundation models for space-based applications. The researchers acknowledge that the unique characteristics of the space environment may require specialized adaptations and modifications to these pre-trained models.
One potential limitation mentioned in the paper is the need to address the domain shift between the internet data used to train foundation models and the data encountered in space-based tasks. The researchers suggest that fine-tuning or further pretraining may be necessary to enable these models to handle the unique characteristics of space data, such as limited connectivity, harsh environmental conditions, and specialized data formats.
Additionally, the paper does not delve deeply into the specific technical approaches or architecture changes that may be required to effectively adapt foundation models for space applications. Further research and experimentation may be needed to develop and validate practical solutions to these challenges.
Overall, the paper serves as an important first step in exploring the intersection of foundation models and space-based tasks. By raising awareness of the opportunities and obstacles, the research encourages the community to continue investigating ways to leverage the power of large-scale AI models in the unique and demanding space domain.
Conclusion
The Adapting a Foundation Model for Space-based Tasks paper highlights the potential benefits and challenges of using foundation models, powerful pre-trained AI systems, for space-based applications. The researchers identify the need to address the domain shift between the internet-based data used to train these models and the specialized data and requirements of the space environment.
By exploring this intersection, the paper lays the groundwork for future research and development efforts to unlock the full potential of foundation models in the space domain. Successful adaptation of these models could lead to significant improvements in efficiency, capabilities, and the pace of innovation in areas such as satellite operations, planetary exploration, and space-based scientific research.
As the space industry continues to evolve and the demand for advanced AI-powered solutions grows, this work serves as an important stepping stone towards integrating the latest advancements in large-scale language models and computer vision with the unique challenges and opportunities of the space domain.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adapting a Foundation Model for Space-based Tasks
Matthew Foutter, Praneet Bhoj, Rohan Sinha, Amine Elhafsi, Somrita Banerjee, Christopher Agia, Justin Kruger, Tommaso Guffanti, Daniele Gammelli, Simone D'Amico, Marco Pavone
Foundation models, e.g., large language models, possess attributes of intelligence which offer promise to endow a robot with the contextual understanding necessary to navigate complex, unstructured tasks in the wild. In the future of space robotics, we see three core challenges which motivate the use of a foundation model adapted to space-based applications: 1) Scalability of ground-in-the-loop operations; 2) Generalizing prior knowledge to novel environments; and 3) Multi-modality in tasks and sensor data. Therefore, as a first-step towards building a foundation model for space-based applications, we automatically label the AI4Mars dataset to curate a language annotated dataset of visual-question-answer tuples. We fine-tune a pretrained LLaVA checkpoint on this dataset to endow a vision-language model with the ability to perform spatial reasoning and navigation on Mars' surface. In this work, we demonstrate that 1) existing vision-language models are deficient visual reasoners in space-based applications, and 2) fine-tuning a vision-language model on extraterrestrial data significantly improves the quality of responses even with a limited training dataset of only a few thousand samples.
Read more8/13/2024
0
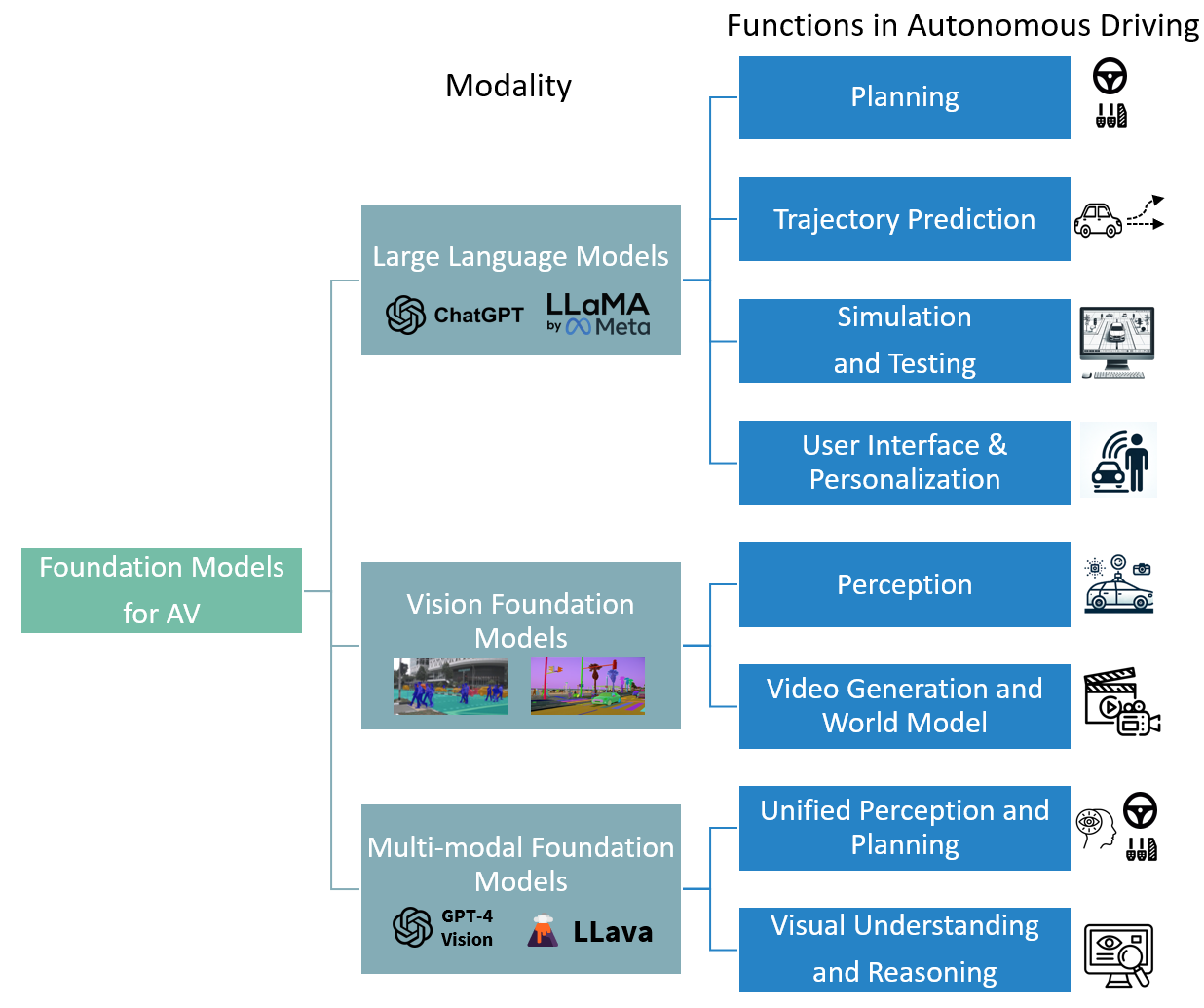
A Survey for Foundation Models in Autonomous Driving
Haoxiang Gao, Zhongruo Wang, Yaqian Li, Kaiwen Long, Ming Yang, Yiqing Shen
The advent of foundation models has revolutionized the fields of natural language processing and computer vision, paving the way for their application in autonomous driving (AD). This survey presents a comprehensive review of more than 40 research papers, demonstrating the role of foundation models in enhancing AD. Large language models contribute to planning and simulation in AD, particularly through their proficiency in reasoning, code generation and translation. In parallel, vision foundation models are increasingly adapted for critical tasks such as 3D object detection and tracking, as well as creating realistic driving scenarios for simulation and testing. Multi-modal foundation models, integrating diverse inputs, exhibit exceptional visual understanding and spatial reasoning, crucial for end-to-end AD. This survey not only provides a structured taxonomy, categorizing foundation models based on their modalities and functionalities within the AD domain but also delves into the methods employed in current research. It identifies the gaps between existing foundation models and cutting-edge AD approaches, thereby charting future research directions and proposing a roadmap for bridging these gaps.
Read more9/6/2024
🔍
0
Foundation Models for Autonomous Robots in Unstructured Environments
Hossein Naderi, Alireza Shojaei, Lifu Huang
Automating activities through robots in unstructured environments, such as construction sites, has been a long-standing desire. However, the high degree of unpredictable events in these settings has resulted in far less adoption compared to more structured settings, such as manufacturing, where robots can be hard-coded or trained on narrowly defined datasets. Recently, pretrained foundation models, such as Large Language Models (LLMs), have demonstrated superior generalization capabilities by providing zero-shot solutions for problems do not present in the training data, proposing them as a potential solution for introducing robots to unstructured environments. To this end, this study investigates potential opportunities and challenges of pretrained foundation models from a multi-dimensional perspective. The study systematically reviews application of foundation models in two field of robotic and unstructured environment and then synthesized them with deliberative acting theory. Findings showed that linguistic capabilities of LLMs have been utilized more than other features for improving perception in human-robot interactions. On the other hand, findings showed that the use of LLMs demonstrated more applications in project management and safety in construction, and natural hazard detection in disaster management. Synthesizing these findings, we located the current state-of-the-art in this field on a five-level scale of automation, placing them at conditional automation. This assessment was then used to envision future scenarios, challenges, and solutions toward autonomous safe unstructured environments. Our study can be seen as a benchmark to track our progress toward that future.
Read more7/23/2024
📈
1
An Interactive Agent Foundation Model
Zane Durante, Bidipta Sarkar, Ran Gong, Rohan Taori, Yusuke Noda, Paul Tang, Ehsan Adeli, Shrinidhi Kowshika Lakshmikanth, Kevin Schulman, Arnold Milstein, Demetri Terzopoulos, Ade Famoti, Noboru Kuno, Ashley Llorens, Hoi Vo, Katsu Ikeuchi, Li Fei-Fei, Jianfeng Gao, Naoki Wake, Qiuyuan Huang
The development of artificial intelligence systems is transitioning from creating static, task-specific models to dynamic, agent-based systems capable of performing well in a wide range of applications. We propose an Interactive Agent Foundation Model that uses a novel multi-task agent training paradigm for training AI agents across a wide range of domains, datasets, and tasks. Our training paradigm unifies diverse pre-training strategies, including visual masked auto-encoders, language modeling, and next-action prediction, enabling a versatile and adaptable AI framework. We demonstrate the performance of our framework across three separate domains -- Robotics, Gaming AI, and Healthcare. Our model demonstrates its ability to generate meaningful and contextually relevant outputs in each area. The strength of our approach lies in its generality, leveraging a variety of data sources such as robotics sequences, gameplay data, large-scale video datasets, and textual information for effective multimodal and multi-task learning. Our approach provides a promising avenue for developing generalist, action-taking, multimodal systems.
Read more6/18/2024