A Survey for Foundation Models in Autonomous Driving

0
Sign in to get full access
Overview
- This paper provides a survey of the use of large language models (LLMs) in autonomous driving (AD) applications.
- LLMs are a type of foundation model that has shown promise in various AI tasks, including natural language processing, computer vision, and robotics.
- The authors explore how LLMs can be applied to different components of autonomous driving systems, such as perception, planning, and control.
Plain English Explanation
The paper discusses how large language models - powerful AI systems that can understand and generate human language - could be used to improve self-driving cars and other autonomous vehicles.
The key idea is that these foundation models trained on massive amounts of data could bring significant benefits to different parts of an autonomous driving system, from perceiving the environment to planning the vehicle's movements and controlling the vehicle.
For example, an LLM could help an autonomous car better understand road signs, pedestrians, and other objects it encounters, improving its perception of the driving environment. It could also assist with planning the vehicle's route and making decisions about how to navigate safely.
The authors survey the existing research in this area, highlighting the potential advantages of using LLMs in autonomous driving as well as some of the challenges that need to be addressed.
Technical Explanation
The paper begins by providing an overview of large language models (LLMs) and their potential applications in autonomous driving (AD) systems. LLMs are a type of foundation model - a highly capable, general-purpose AI system trained on vast amounts of data that can be adapted to a wide range of tasks.
The authors then explore how LLMs could be leveraged in different components of an AD system, such as:
-
Perception: LLMs could enhance an autonomous vehicle's understanding of its environment by improving tasks like object detection, semantic segmentation, and scene understanding.
-
Planning: LLMs could assist with high-level decision-making, such as route planning, traffic negotiation, and collision avoidance.
-
Control: LLMs could be used to generate low-level control commands to navigate the vehicle, potentially leading to more smooth and natural driving behavior.
The paper also discusses the challenges and limitations of using LLMs in AD, such as the need for efficient fine-tuning and adaptation, ensuring safety and robustness, and addressing ethical concerns around the use of AI in autonomous systems.
Critical Analysis
The paper provides a comprehensive overview of the potential use of large language models in autonomous driving, highlighting both the promise and the challenges of this approach.
One potential limitation is that the paper focuses primarily on the high-level capabilities of LLMs, without delving into the specific technical details of how they could be integrated into real-world AD systems. More research may be needed to address the practical implementation challenges, such as ensuring the safety and reliability of LLM-based components.
Additionally, the paper does not address the broader societal implications of using LLMs in autonomous driving, such as the impact on employment, transportation equity, and public acceptance of self-driving technology. These are important considerations that should be explored further.
Overall, the paper provides a solid foundation for understanding the potential role of large language models in autonomous driving, but more work is needed to fully realize the benefits and address the potential drawbacks of this approach.
Conclusion
This paper presents a comprehensive survey of the use of large language models (LLMs) in autonomous driving (AD) applications. The authors highlight how these powerful AI systems, which are trained on vast amounts of data, could be leveraged to enhance various components of an AD system, including perception, planning, and control.
While the potential benefits of using LLMs in AD are substantial, the paper also acknowledges the challenges that need to be addressed, such as ensuring safety, reliability, and ethical considerations. As the field of autonomous driving continues to evolve, the insights and research directions outlined in this paper will be valuable for guiding future developments in this important area of AI and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Survey for Foundation Models in Autonomous Driving
Haoxiang Gao, Zhongruo Wang, Yaqian Li, Kaiwen Long, Ming Yang, Yiqing Shen
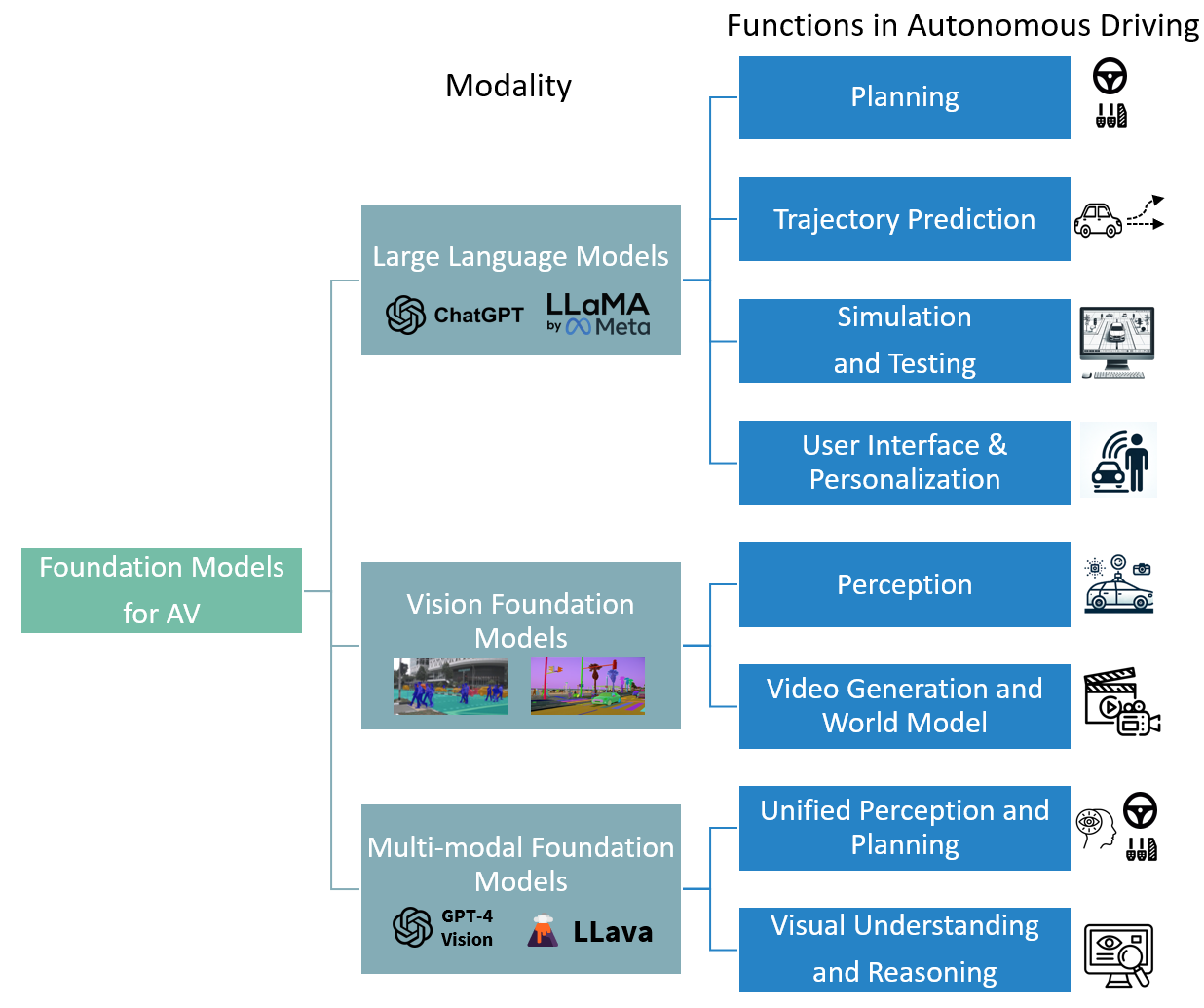
The advent of foundation models has revolutionized the fields of natural language processing and computer vision, paving the way for their application in autonomous driving (AD). This survey presents a comprehensive review of more than 40 research papers, demonstrating the role of foundation models in enhancing AD. Large language models contribute to planning and simulation in AD, particularly through their proficiency in reasoning, code generation and translation. In parallel, vision foundation models are increasingly adapted for critical tasks such as 3D object detection and tracking, as well as creating realistic driving scenarios for simulation and testing. Multi-modal foundation models, integrating diverse inputs, exhibit exceptional visual understanding and spatial reasoning, crucial for end-to-end AD. This survey not only provides a structured taxonomy, categorizing foundation models based on their modalities and functionalities within the AD domain but also delves into the methods employed in current research. It identifies the gaps between existing foundation models and cutting-edge AD approaches, thereby charting future research directions and proposing a roadmap for bridging these gaps.
Read more9/6/2024
🤿
0
Prospective Role of Foundation Models in Advancing Autonomous Vehicles
Jianhua Wu, Bingzhao Gao, Jincheng Gao, Jianhao Yu, Hongqing Chu, Qiankun Yu, Xun Gong, Yi Chang, H. Eric Tseng, Hong Chen, Jie Chen
With the development of artificial intelligence and breakthroughs in deep learning, large-scale Foundation Models (FMs), such as GPT, Sora, etc., have achieved remarkable results in many fields including natural language processing and computer vision. The application of FMs in autonomous driving holds considerable promise. For example, they can contribute to enhancing scene understanding and reasoning. By pre-training on rich linguistic and visual data, FMs can understand and interpret various elements in a driving scene, and provide cognitive reasoning to give linguistic and action instructions for driving decisions and planning. Furthermore, FMs can augment data based on the understanding of driving scenarios to provide feasible scenes of those rare occurrences in the long tail distribution that are unlikely to be encountered during routine driving and data collection. The enhancement can subsequently lead to improvement in the accuracy and reliability of autonomous driving systems. Another testament to the potential of FMs' applications lies in World Models, exemplified by the DREAMER series, which showcases the ability to comprehend physical laws and dynamics. Learning from massive data under the paradigm of self-supervised learning, World Model can generate unseen yet plausible driving environments, facilitating the enhancement in the prediction of road users' behaviors and the off-line training of driving strategies. In this paper, we synthesize the applications and future trends of FMs in autonomous driving. By utilizing the powerful capabilities of FMs, we strive to tackle the potential issues stemming from the long-tail distribution in autonomous driving, consequently advancing overall safety in this domain.
Read more5/20/2024
🔍
0
Foundation Models for Autonomous Robots in Unstructured Environments
Hossein Naderi, Alireza Shojaei, Lifu Huang
Automating activities through robots in unstructured environments, such as construction sites, has been a long-standing desire. However, the high degree of unpredictable events in these settings has resulted in far less adoption compared to more structured settings, such as manufacturing, where robots can be hard-coded or trained on narrowly defined datasets. Recently, pretrained foundation models, such as Large Language Models (LLMs), have demonstrated superior generalization capabilities by providing zero-shot solutions for problems do not present in the training data, proposing them as a potential solution for introducing robots to unstructured environments. To this end, this study investigates potential opportunities and challenges of pretrained foundation models from a multi-dimensional perspective. The study systematically reviews application of foundation models in two field of robotic and unstructured environment and then synthesized them with deliberative acting theory. Findings showed that linguistic capabilities of LLMs have been utilized more than other features for improving perception in human-robot interactions. On the other hand, findings showed that the use of LLMs demonstrated more applications in project management and safety in construction, and natural hazard detection in disaster management. Synthesizing these findings, we located the current state-of-the-art in this field on a five-level scale of automation, placing them at conditional automation. This assessment was then used to envision future scenarios, challenges, and solutions toward autonomous safe unstructured environments. Our study can be seen as a benchmark to track our progress toward that future.
Read more7/23/2024
🌿
0
What Foundation Models can Bring for Robot Learning in Manipulation : A Survey
Dingzhe Li, Yixiang Jin, Yong A, Hongze Yu, Jun Shi, Xiaoshuai Hao, Peng Hao, Huaping Liu, Fuchun Sun, Jianwei Zhang, Bin Fang
The realization of universal robots is an ultimate goal of researchers. However, a key hurdle in achieving this goal lies in the robots' ability to manipulate objects in their unstructured surrounding environments according to different tasks. The learning-based approach is considered an effective way to address generalization. The impressive performance of foundation models in the fields of computer vision and natural language suggests the potential of embedding foundation models into manipulation tasks as a viable path toward achieving general manipulation capability. However, we believe achieving general manipulation capability requires an overarching framework akin to auto driving. This framework should encompass multiple functional modules, with different foundation models assuming distinct roles in facilitating general manipulation capability. This survey focuses on the contributions of foundation models to robot learning for manipulation. We propose a comprehensive framework and detail how foundation models can address challenges in each module of the framework. What's more, we examine current approaches, outline challenges, suggest future research directions, and identify potential risks associated with integrating foundation models into this domain.
Read more8/12/2024