Adaptive Backstepping and Non-singular Sliding Mode Control for Quadrotor UAVs with Unknown Time-varying Uncertainties

0

Sign in to get full access
Overview
- This paper presents a new control system for quadrotor unmanned aerial vehicles (UAVs) that can handle unknown and time-varying uncertainties.
- The proposed control system combines adaptive backstepping control and non-singular sliding mode control to achieve precise position and orientation control.
- The control system is designed to ensure asymptotic stability of the quadrotor's position and orientation, even in the presence of unknown and time-varying uncertainties.
Plain English Explanation
The paper describes a new control system for quadrotor drones that can adapt to unknown and changing conditions. Quadrotors are a type of unmanned aerial vehicle (UAV) that use four propellers to fly. Controlling these drones precisely can be challenging, especially when there are unknown factors that affect their behavior, like changing weather conditions or mechanical issues.
The researchers developed a two-part control system that combines adaptive backstepping control and non-singular sliding mode control. Adaptive backstepping is a technique that allows the controller to automatically adjust its parameters to compensate for changes, while non-singular sliding mode control provides robust stability even when there are unknown factors at play.
By using this combined approach, the researchers were able to design a control system that can precisely control a quadrotor's position and orientation, even when faced with unknown and time-varying uncertainties. This means the drone can maintain a stable flight path and stay on target, even in challenging or changing conditions.
Technical Explanation
The paper presents an adaptive backstepping and non-singular sliding mode control strategy for controlling quadrotor UAVs with unknown and time-varying uncertainties. The control system is designed to ensure asymptotic stability of the quadrotor's position and orientation.
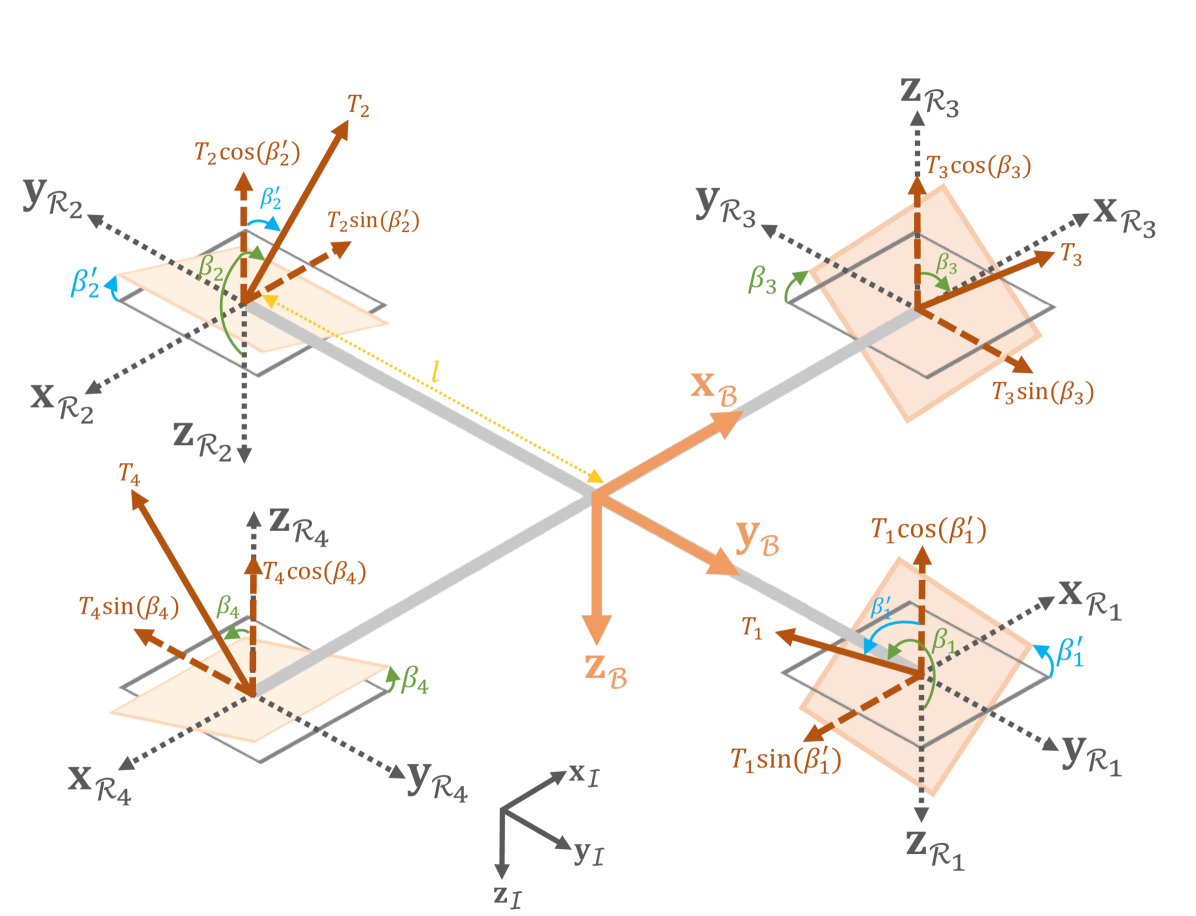
The control system uses a unit-quaternion representation to describe the quadrotor's orientation, which avoids the singularities associated with Euler angles. The adaptive backstepping control component adaptively estimates the unknown time-varying uncertainties, while the non-singular sliding mode control component provides robust stabilization.
The researchers analyze the stability of the closed-loop system and prove that the proposed control strategy achieves asymptotic convergence of the quadrotor's position and orientation to their desired values, even in the presence of unknown and time-varying uncertainties. Simulation results are presented to demonstrate the effectiveness of the proposed control system.
Critical Analysis
The paper presents a comprehensive control system that can handle unknown and time-varying uncertainties in quadrotor UAVs. The combination of adaptive backstepping and non-singular sliding mode control appears to be a promising approach for achieving precise position and orientation control in the face of challenging conditions.
One potential limitation of the research is that it is primarily based on simulations, and the performance of the control system in real-world experiments is not evaluated. Further research could involve validating the control system on physical quadrotor platforms to assess its practical feasibility and robustness.
Additionally, the paper does not discuss the computational complexity of the proposed control system or its implementation requirements. Future work could explore ways to optimize the control algorithm for real-time execution on embedded systems commonly used in quadrotor platforms.
Overall, the research presents a valuable contribution to the field of quadrotor control, particularly in the context of handling unknown uncertainties. The proposed control system could have significant implications for improving the reliability and performance of quadrotor UAVs in a wide range of applications.
Conclusion
This paper introduces a novel control system for quadrotor UAVs that can effectively handle unknown and time-varying uncertainties. By combining adaptive backstepping and non-singular sliding mode control, the researchers have developed a control strategy that can ensure asymptotic stability of the quadrotor's position and orientation, even in the presence of challenging conditions.
The proposed control system has the potential to significantly improve the reliability and performance of quadrotor UAVs, making them more suitable for a wide range of applications, such as search and rescue operations, infrastructure inspection, and precision agriculture. While further research is needed to validate the control system's real-world performance, this work represents an important step forward in the development of robust and adaptive control strategies for quadrotor drones.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adaptive Backstepping and Non-singular Sliding Mode Control for Quadrotor UAVs with Unknown Time-varying Uncertainties
Arezo Shevidi, Hashim A. Hashim
This paper presents a novel quaternion-based nonsingular control system for underactuated vertical-take-off and landing (VTOL) Unmanned Aerial Vehicles (UAVs). Position and attitude tracking is challenging regarding singularity and accuracy. Quaternion-based Adaptive Backstepping Control (QABC) is developed to tackle the underactuated issues of UAV control systems in a cascaded way. Leveraging the virtual control (auxiliary control) developed in the QABC, desired attitude components and required thrust are produced. Afterwards, we propose Quaternion-based Sliding Mode Control (QASMC) to enhance the stability and mitigate chattering issues. The sliding surface is modified to avoid singularity compared to conventional SMC. To improve the robustness of controllers, the control parameters are updated using adaptation laws. Furthermore, the asymptotic stability of translational and rotational dynamics is guaranteed by utilizing Lyapunov stability and Barbalet Lemma. Finally, the comprehensive comparison results are provided to verify the effectiveness of the proposed controllers in the presence of unknown time-varying parameter uncertainties and significant initial errors. Keywords: Non-singular Sliding Mode Control, Adaptive Backstepping Control, Unit-quaternion, Drones, Unmanned Aerial Vehicles, Asymptotic Stability, Position and Orientation Control
Read more7/16/2024

0
Quaternion-based Adaptive Backstepping Fast Terminal Sliding Mode Control for Quadrotor UAVs with Finite Time Convergence
Arezo Shevidi, Hashim A. Hashim
This paper proposes a novel quaternion-based approach for tracking the translation (position and linear velocity) and rotation (attitude and angular velocity) trajectories of underactuated Unmanned Aerial Vehicles (UAVs). Quadrotor UAVs are challenging regarding accuracy, singularity, and uncertainties issues. Controllers designed based on unit-quaternion are singularity-free for attitude representation compared to other methods (e.g., Euler angles), which fail to represent the vehicle's attitude at multiple orientations. Quaternion-based Adaptive Backstepping Control (ABC) and Adaptive Fast Terminal Sliding Mode Control (AFTSMC) are proposed to address a set of challenging problems. A quaternion-based ABC, a superior recursive approach, is proposed to generate the necessary thrust handling unknown uncertainties and UAV translation trajectory tracking. Next, a quaternion-based AFTSMC is developed to overcome parametric uncertainties, avoid singularity, and ensure fast convergence in a finite time. Moreover, the proposed AFTSMC is able to significantly minimize control signal chattering, which is the main reason for actuator failure and provide smooth and accurate rotational control input. To ensure the robustness of the proposed approach, the designed control algorithms have been validated considering unknown time-variant parametric uncertainties and significant initialization errors. The proposed techniques has been compared to state-of-the-art control technique. Keywords: Adaptive Backstepping Control (ABC), Adaptive Fast Terminal Sliding Mode Control (AFTSMC), Unit-quaternion, Unmanned Aerial Vehicles, Singularity Free, Pose Control
Read more8/1/2024
0
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
Read more6/26/2024
🔄
0
Adaptive-Sliding Mode Trajectory Control of Robot Manipulators with Uncertainties
Mustafa M. Mustafa, Carl D. Crane, Ibrahim Hamarash
In this paper, we propose and demonstrate an adaptive-sliding mode control for trajectory tracking control of robot manipulators subjected to uncertain dynamics, vibration disturbance, and payload variation disturbance. Throughout this work we seek a controller that is, robust to the uncertainty and disturbance, accurate, and implementable. To perform these requirements, we use a nonlinear Lyapunov-based approach for designing the controller and guaranteeing its stability. MATLAB-SIMULINK software is used to validate the approach and demonstrate the performance of the controller. Simulation results show that the derived controller is stable, robust to the disturbance and uncertainties, accurate, and implementable.
Read more8/7/2024