Adaptive Variational Continual Learning via Task-Heuristic Modelling

0

Sign in to get full access
Overview
- The paper proposes an approach called Adaptive Variational Continual Learning (AVCL) that addresses the challenge of learning new tasks sequentially while avoiding forgetting previously learned information.
- AVCL uses a task-heuristic modeling strategy to dynamically adjust the model's complexity during training, allowing it to adapt to the difficulty of each task.
- The authors demonstrate the effectiveness of AVCL on several continual learning benchmarks, showing improvements over existing techniques.
Plain English Explanation
The paper describes a new method called Adaptive Variational Continual Learning (AVCL) that helps artificial intelligence (AI) systems learn new tasks one after another without forgetting what they've learned before. This is a common challenge in the field of "continual learning."
AVCL works by dynamically adjusting the complexity of the AI model based on the difficulty of each new task. When a task is easy, the model can stay simple. But when a task is more challenging, the model can become more complex to handle it. This flexibility allows the AI to adapt and learn new things without catastrophically forgetting the old information.
The researchers tested AVCL on several standard continual learning benchmarks and found that it outperformed existing techniques. This suggests that AVCL could be a valuable tool for building AI systems that can continuously expand their knowledge and skills over time, just like humans do.
Technical Explanation
The paper introduces an approach called Adaptive Variational Continual Learning (AVCL), which addresses the challenge of Variational Continual Learning (VCL). VCL is a framework for training neural networks to learn new tasks sequentially while avoiding catastrophic forgetting of previously learned information.
AVCL builds on VCL by incorporating a task-heuristic modeling strategy. This allows the model's complexity to be dynamically adjusted during training to match the difficulty of each new task. When a task is easy, the model can remain simple. But for more challenging tasks, the model can become more complex to handle the increased difficulty.
The authors evaluate AVCL on several standard continual learning benchmarks, including permuted MNIST, rotated MNIST, and tiered-ImageNet. They show that AVCL outperforms existing VCL techniques, demonstrating the benefits of the adaptive modeling approach.
Critical Analysis
The paper presents a thoughtful and well-designed approach to the important problem of continual learning. The key innovation of task-heuristic modeling is a promising direction for making VCL models more flexible and adaptable to the specific challenges of each new task.
However, the paper does not explore some potential limitations or caveats of the AVCL method. For example, it is not clear how well AVCL would scale to extremely long sequences of tasks or to tasks with very high complexity. Additionally, the reliance on task-specific heuristics could make the approach less generalizable than techniques that learn task-agnostic strategies for continual learning.
Further research could investigate how AVCL performs in more realistic and open-ended continual learning scenarios, as well as explore ways to make the task-heuristic modeling more automated and less reliant on human-designed rules.
Conclusion
Overall, the Adaptive Variational Continual Learning (AVCL) approach presented in this paper represents a promising step forward for the field of continual learning. By dynamically adjusting the model complexity based on task-specific heuristics, AVCL demonstrates the potential for AI systems to continuously expand their knowledge and skills over time, overcoming the challenge of catastrophic forgetting. As the field of continual learning continues to evolve, techniques like AVCL could play an important role in developing AI agents that can learn and adapt in human-like ways.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adaptive Variational Continual Learning via Task-Heuristic Modelling
Fan Yang
Variational continual learning (VCL) is a turn-key learning algorithm that has state-of-the-art performance among the best continual learning models. In our work, we explore an extension of the generalized variational continual learning (GVCL) model, named AutoVCL, which combines task heuristics for informed learning and model optimization. We demonstrate that our model outperforms the standard GVCL with fixed hyperparameters, benefiting from the automatic adjustment of the hyperparameter based on the difficulty and similarity of the incoming task compared to the previous tasks.
Read more8/30/2024

0
EVCL: Elastic Variational Continual Learning with Weight Consolidation
Hunar Batra, Ronald Clark
Continual learning aims to allow models to learn new tasks without forgetting what has been learned before. This work introduces Elastic Variational Continual Learning with Weight Consolidation (EVCL), a novel hybrid model that integrates the variational posterior approximation mechanism of Variational Continual Learning (VCL) with the regularization-based parameter-protection strategy of Elastic Weight Consolidation (EWC). By combining the strengths of both methods, EVCL effectively mitigates catastrophic forgetting and enables better capture of dependencies between model parameters and task-specific data. Evaluated on five discriminative tasks, EVCL consistently outperforms existing baselines in both domain-incremental and task-incremental learning scenarios for deep discriminative models.
Read more6/26/2024

0
Adaptive Hyperparameter Optimization for Continual Learning Scenarios
Rudy Semola, Julio Hurtado, Vincenzo Lomonaco, Davide Bacciu
Hyperparameter selection in continual learning scenarios is a challenging and underexplored aspect, especially in practical non-stationary environments. Traditional approaches, such as grid searches with held-out validation data from all tasks, are unrealistic for building accurate lifelong learning systems. This paper aims to explore the role of hyperparameter selection in continual learning and the necessity of continually and automatically tuning them according to the complexity of the task at hand. Hence, we propose leveraging the nature of sequence task learning to improve Hyperparameter Optimization efficiency. By using the functional analysis of variance-based techniques, we identify the most crucial hyperparameters that have an impact on performance. We demonstrate empirically that this approach, agnostic to continual scenarios and strategies, allows us to speed up hyperparameters optimization continually across tasks and exhibit robustness even in the face of varying sequential task orders. We believe that our findings can contribute to the advancement of continual learning methodologies towards more efficient, robust and adaptable models for real-world applications.
Read more6/21/2024
0
Improving Data-aware and Parameter-aware Robustness for Continual Learning
Hanxi Xiao, Fan Lyu
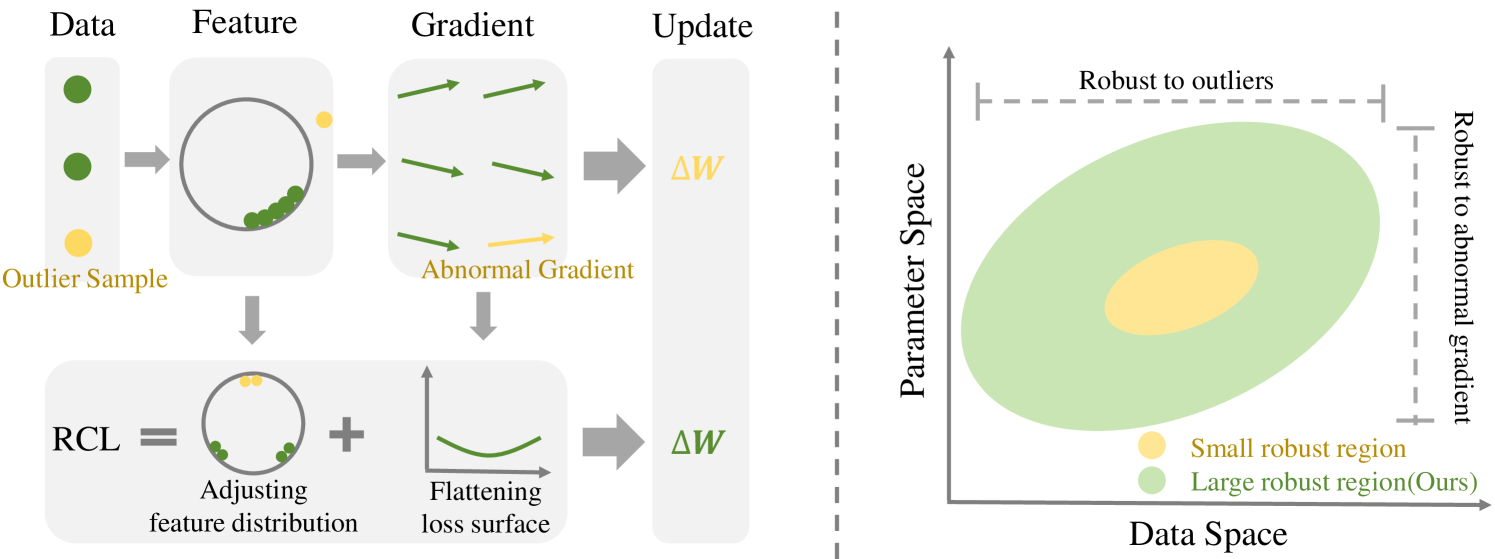
The goal of Continual Learning (CL) task is to continuously learn multiple new tasks sequentially while achieving a balance between the plasticity and stability of new and old knowledge. This paper analyzes that this insufficiency arises from the ineffective handling of outliers, leading to abnormal gradients and unexpected model updates. To address this issue, we enhance the data-aware and parameter-aware robustness of CL, proposing a Robust Continual Learning (RCL) method. From the data perspective, we develop a contrastive loss based on the concepts of uniformity and alignment, forming a feature distribution that is more applicable to outliers. From the parameter perspective, we present a forward strategy for worst-case perturbation and apply robust gradient projection to the parameters. The experimental results on three benchmarks show that the proposed method effectively maintains robustness and achieves new state-of-the-art (SOTA) results. The code is available at: https://github.com/HanxiXiao/RCL
Read more5/28/2024