Lifelong Robot Library Learning: Bootstrapping Composable and Generalizable Skills for Embodied Control with Language Models
2406.18746
0
0
Abstract
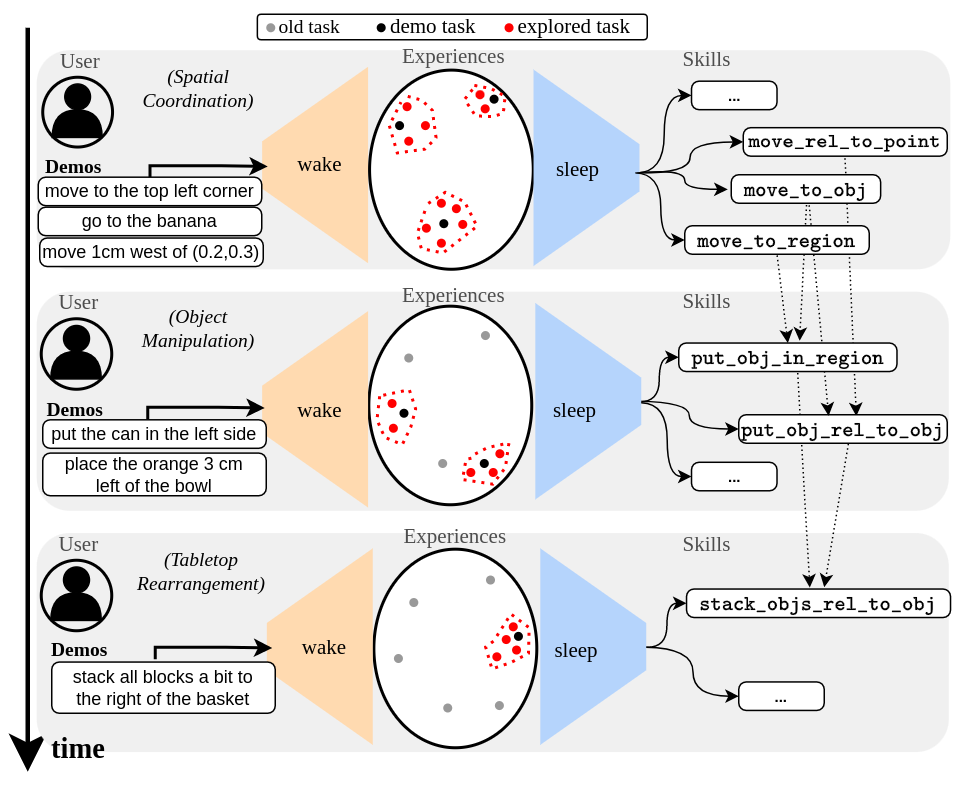
Large Language Models (LLMs) have emerged as a new paradigm for embodied reasoning and control, most recently by generating robot policy code that utilizes a custom library of vision and control primitive skills. However, prior arts fix their skills library and steer the LLM with carefully hand-crafted prompt engineering, limiting the agent to a stationary range of addressable tasks. In this work, we introduce LRLL, an LLM-based lifelong learning agent that continuously grows the robot skill library to tackle manipulation tasks of ever-growing complexity. LRLL achieves this with four novel contributions: 1) a soft memory module that allows dynamic storage and retrieval of past experiences to serve as context, 2) a self-guided exploration policy that proposes new tasks in simulation, 3) a skill abstractor that distills recent experiences into new library skills, and 4) a lifelong learning algorithm for enabling human users to bootstrap new skills with minimal online interaction. LRLL continuously transfers knowledge from the memory to the library, building composable, general and interpretable policies, while bypassing gradient-based optimization, thus relieving the learner from catastrophic forgetting. Empirical evaluation in a simulated tabletop environment shows that LRLL outperforms end-to-end and vanilla LLM approaches in the lifelong setup while learning skills that are transferable to the real world. Project material will become available at the webpage https://gtziafas.github.io/LRLL_project.
Create account to get full access
Overview
- This paper explores the concept of "Lifelong Robot Library Learning" - a method for enabling robots to learn and combine versatile skills over time, using large language models as the foundation.
- The key ideas include:
- Bootstrapping robot skills by pre-training on a large corpus of language data
- Composing and generalizing these skills to new tasks and environments
- Continuously expanding the robot's skill library through ongoing learning
Plain English Explanation
The researchers in this paper are working on teaching robots new skills in an ongoing, flexible way. Rather than programming robots with a fixed set of abilities, the goal is to allow them to continuously learn and expand their capabilities over time.
The core of their approach is to use large language models - powerful AI systems that have been trained on massive amounts of text data. These language models can serve as a starting point or "bootstrap" for the robot's skills. By pre-training the robot on the language data, it can begin to develop a basic understanding of concepts, tasks, and how to communicate about them.
From this foundation, the robot can then start to compose and generalize its skills. For example, if the robot learns how to grasp objects, it can apply that same skill to picking up and manipulating different types of objects in new environments. The language model helps the robot reason about and adapt its skills in flexible ways.
Importantly, the robot doesn't stop learning after this initial pre-training. It can continuously expand its "library" of skills through ongoing interaction and learning. Over time, the robot builds up a diverse repertoire of capabilities that it can draw upon to handle increasingly complex real-world tasks.
This work aims to make robots more adaptable and capable, rather than being limited to a fixed set of pre-programmed behaviors. By tapping into the power of large language models, the researchers hope to enable robots to learn, reason, and problem-solve in more human-like ways.
Technical Explanation
The core idea of this paper is to leverage large language models as a foundation for enabling robots to learn and combine versatile skills over time, in a process the authors call "Lifelong Robot Library Learning." [See: https://aimodels.fyi/papers/arxiv/large-language-models-as-generalizable-policies-embodied]
The researchers first pre-train the robot's control policy using a large language model, which serves to "bootstrap" the robot's initial understanding of concepts, tasks, and how to communicate about them. [See: https://aimodels.fyi/papers/arxiv/agentic-skill-discovery] This pre-training allows the robot to begin composing and generalizing its skills, applying learned capabilities to new objects, environments, and tasks.
Importantly, the robot's learning does not stop after this initial pre-training. The system is designed to continuously expand its "library" of skills through ongoing interaction and learning. [See: https://aimodels.fyi/papers/arxiv/robocoder-robotic-learning-from-basic-skills-to] This allows the robot to build up a diverse repertoire of capabilities that it can draw upon to handle increasingly complex real-world tasks.
The authors demonstrate their approach in several experiments, showing how the robot can learn skills like object manipulation, navigation, and tool use, and then flexibly apply those skills in new contexts. [See: https://aimodels.fyi/papers/arxiv/towards-natural-language-driven-assembly-using-foundation]
Critical Analysis
The paper makes a compelling case for the potential of leveraging large language models to enable more adaptable and capable robot learning. By using language models as a foundation, the researchers are able to bootstrap the robot's understanding of concepts and tasks, and then build upon that foundation to compose and generalize skills in flexible ways.
However, the paper does not fully address some potential limitations and areas for further research. For example, it remains to be seen how well this approach would scale to the full complexity of real-world environments and tasks, particularly in terms of safety, robustness, and sample efficiency. [See: https://aimodels.fyi/papers/arxiv/plan-seq-learn-language-model-guided-rl]
Additionally, the reliance on large language models raises questions about the interpretability and transparency of the robot's decision-making processes. More work may be needed to understand how the robot is reasoning about and combining its skills in a way that is understandable to human operators and users.
Overall, this paper represents an important step forward in the quest to develop more adaptable and capable robot learning systems. The core ideas of leveraging language models and continuous skill expansion are compelling and deserve further exploration and refinement.
Conclusion
This paper presents a novel approach to robot learning called "Lifelong Robot Library Learning," which aims to enable robots to continuously expand their repertoire of skills by tapping into the power of large language models.
By pre-training the robot's control policy on a large corpus of language data, the researchers are able to bootstrap the robot's understanding of concepts, tasks, and communication. This foundation then allows the robot to compose and generalize its skills, applying learned capabilities to new contexts.
Importantly, the robot's learning does not stop after this initial pre-training. The system is designed to continuously expand its "library" of skills through ongoing interaction and learning, allowing the robot to build up a diverse set of capabilities over time.
While the paper highlights the potential of this approach, it also raises important questions about scalability, robustness, and interpretability that will need to be addressed through further research and refinement. Nevertheless, the core ideas presented in this work represent a promising step forward in the development of more adaptable and capable robot learning systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
0
0
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a grasping capability can never emerge from a skill library containing only diverse pushing skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the ASD skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. The project page can be found at: https://agentic-skill-discovery.github.io.
5/27/2024
💬
Large Language Models as Generalizable Policies for Embodied Tasks
Andrew Szot, Max Schwarzer, Harsh Agrawal, Bogdan Mazoure, Walter Talbott, Katherine Metcalf, Natalie Mackraz, Devon Hjelm, Alexander Toshev
0
0
We show that large language models (LLMs) can be adapted to be generalizable policies for embodied visual tasks. Our approach, called Large LAnguage model Reinforcement Learning Policy (LLaRP), adapts a pre-trained frozen LLM to take as input text instructions and visual egocentric observations and output actions directly in the environment. Using reinforcement learning, we train LLaRP to see and act solely through environmental interactions. We show that LLaRP is robust to complex paraphrasings of task instructions and can generalize to new tasks that require novel optimal behavior. In particular, on 1,000 unseen tasks it achieves 42% success rate, 1.7x the success rate of other common learned baselines or zero-shot applications of LLMs. Finally, to aid the community in studying language conditioned, massively multi-task, embodied AI problems we release a novel benchmark, Language Rearrangement, consisting of 150,000 training and 1,000 testing tasks for language-conditioned rearrangement. Video examples of LLaRP in unseen Language Rearrangement instructions are at https://llm-rl.github.io.
4/17/2024

RoboCoder: Robotic Learning from Basic Skills to General Tasks with Large Language Models
Jingyao Li, Pengguang Chen, Sitong Wu, Chuanyang Zheng, Hong Xu, Jiaya Jia
0
0
The emergence of Large Language Models (LLMs) has improved the prospects for robotic tasks. However, existing benchmarks are still limited to single tasks with limited generalization capabilities. In this work, we introduce a comprehensive benchmark and an autonomous learning framework, RoboCoder aimed at enhancing the generalization capabilities of robots in complex environments. Unlike traditional methods that focus on single-task learning, our research emphasizes the development of a general-purpose robotic coding algorithm that enables robots to leverage basic skills to tackle increasingly complex tasks. The newly proposed benchmark consists of 80 manually designed tasks across 7 distinct entities, testing the models' ability to learn from minimal initial mastery. Initial testing revealed that even advanced models like GPT-4 could only achieve a 47% pass rate in three-shot scenarios with humanoid entities. To address these limitations, the RoboCoder framework integrates Large Language Models (LLMs) with a dynamic learning system that uses real-time environmental feedback to continuously update and refine action codes. This adaptive method showed a remarkable improvement, achieving a 36% relative improvement. Our codes will be released.
6/7/2024
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
0
0
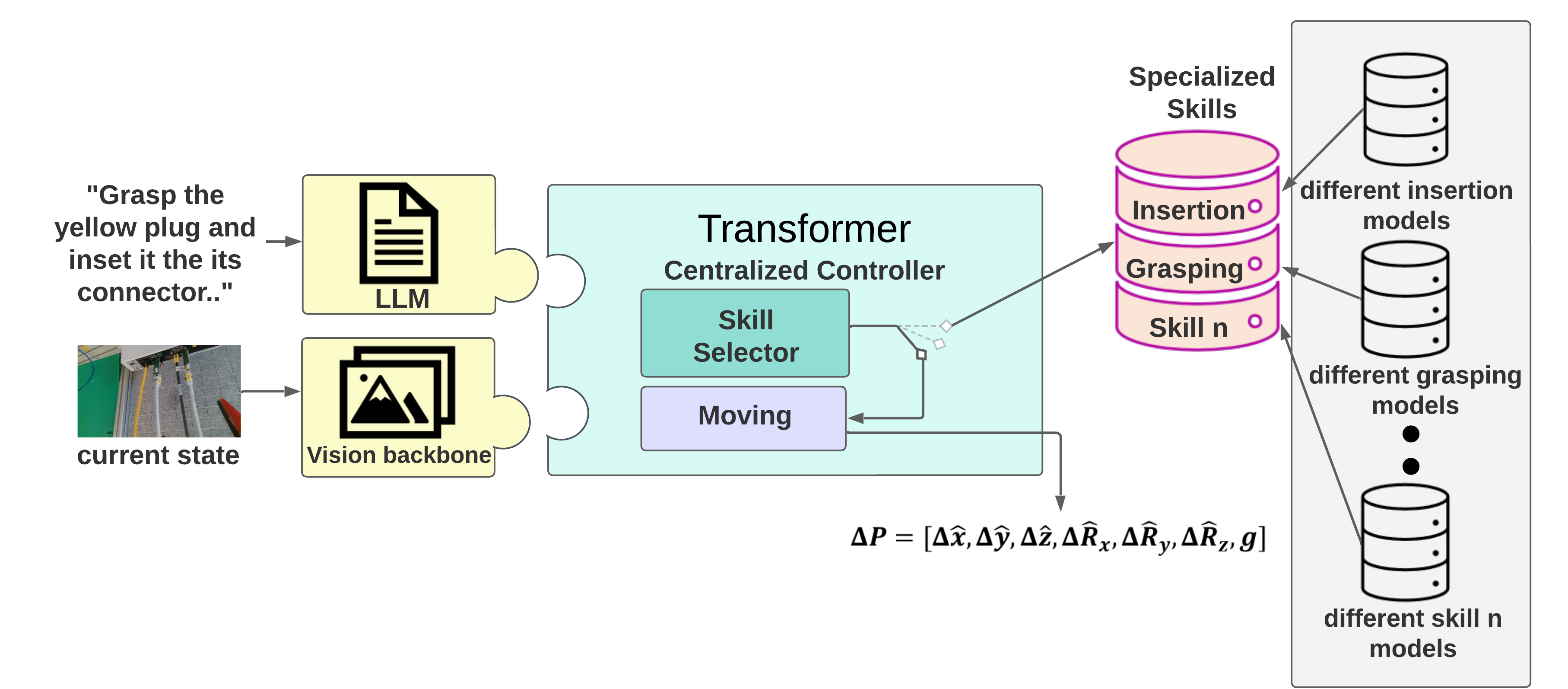
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
6/26/2024