AlanaVLM: A Multimodal Embodied AI Foundation Model for Egocentric Video Understanding
2406.13807
0
0
Abstract
AI personal assistants deployed via robots or wearables require embodied understanding to collaborate with humans effectively. However, current Vision-Language Models (VLMs) primarily focus on third-person view videos, neglecting the richness of egocentric perceptual experience. To address this gap, we propose three key contributions. First, we introduce the Egocentric Video Understanding Dataset (EVUD) for training VLMs on video captioning and question answering tasks specific to egocentric videos. Second, we present AlanaVLM, a 7B parameter VLM trained using parameter-efficient methods on EVUD. Finally, we evaluate AlanaVLM's capabilities on OpenEQA, a challenging benchmark for embodied video question answering. Our model achieves state-of-the-art performance, outperforming open-source models including strong Socratic models using GPT-4 as a planner by 3.6%. Additionally, we outperform Claude 3 and Gemini Pro Vision 1.0 and showcase competitive results compared to Gemini Pro 1.5 and GPT-4V, even surpassing the latter in spatial reasoning. This research paves the way for building efficient VLMs that can be deployed in robots or wearables, leveraging embodied video understanding to collaborate seamlessly with humans in everyday tasks, contributing to the next generation of Embodied AI.
Create account to get full access
Overview
- This paper presents AlanaVLM, a multimodal embodied AI foundation model for understanding egocentric (first-person) videos.
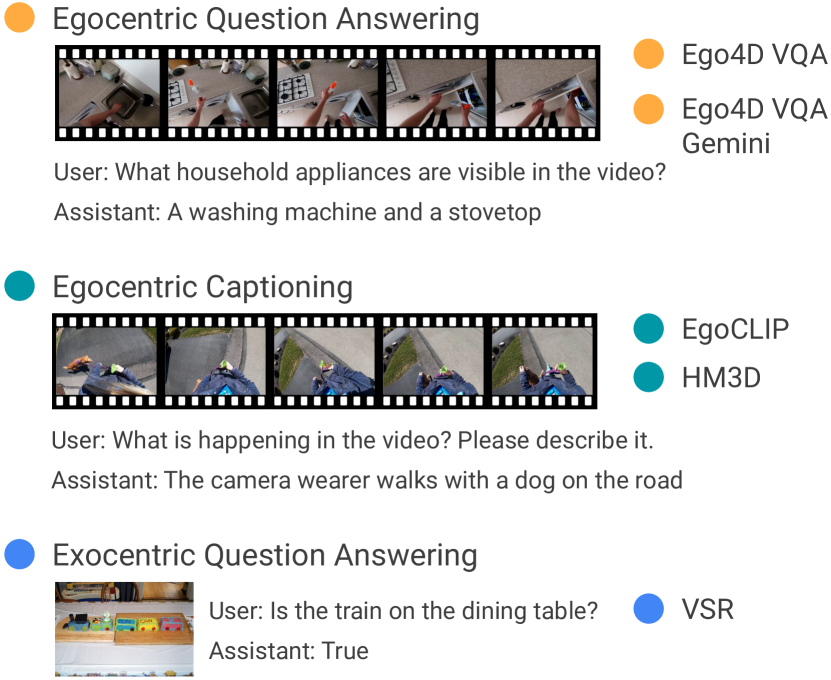
- The model is trained on a new dataset called EVUD (Egocentric Video Understanding Dataset) that contains diverse egocentric video data with rich annotations.
- AlanaVLM aims to advance the state of the art in egocentric video understanding, which has important applications in areas like robotics, augmented reality, and assistive technology.
Plain English Explanation
Imagine you're wearing a camera on your head and it's recording everything you see throughout your day. That's the kind of video data that AlanaVLM is designed to understand. This model can watch those first-person videos and make sense of what's happening - it can identify objects, actions, interactions, and more.
The researchers created a new dataset called EVUD to train AlanaVLM. EVUD has lots of different kinds of egocentric videos, along with detailed annotations describing what's in them. By training on this diverse dataset, AlanaVLM learns to become an expert at understanding the complexities of first-person video footage.
This capability is really important for developing intelligent virtual agents or robotic systems that can seamlessly interact with the world from a first-person perspective, like augmented reality applications or virtual reality assistants. AlanaVLM represents an important step forward in grounding AI models in the embodied, egocentric experience of being in the world.
Technical Explanation
The key contributions of this work are:
- The introduction of AlanaVLM, a multimodal foundation model for egocentric video understanding that leverages both visual and textual inputs.
- The creation of the EVUD dataset, a large-scale egocentric video understanding benchmark with rich annotations.
- Extensive experiments demonstrating AlanaVLM's strong performance on a variety of egocentric video understanding tasks.
The AlanaVLM architecture consists of a shared visual-linguistic encoder that processes both RGB frames and text inputs. This allows the model to learn cross-modal representations that capture the relationships between visual and textual information in egocentric videos.
The EVUD dataset includes over 10,000 egocentric video clips across 100 diverse environments, with annotations for object detection, action recognition, affordance prediction, and more. This dataset provides a comprehensive benchmark for evaluating the capabilities of egocentric video understanding models.
Experimental results show that AlanaVLM outperforms strong baselines on a range of EVUD tasks, demonstrating its effectiveness as a multimodal foundation model for this domain. The model is able to leverage its cross-modal understanding to reason about the relationships between the visual and linguistic elements of egocentric video.
Critical Analysis
The authors acknowledge several limitations of the current work, including the need for further scaling of the EVUD dataset and the model, as well as the potential for biases in the data collection and annotation process. Additionally, the paper does not provide a detailed analysis of the model's interpretability or its ability to generalize to out-of-distribution egocentric video samples.
While the results are impressive, it would be valuable to see more thorough investigations into the model's failure modes and potential weaknesses. For example, the performance on rare or atypical egocentric scenarios is not extensively explored.
Furthermore, the authors could have delved deeper into the ethical implications of developing such powerful egocentric video understanding models, particularly around issues of privacy, bias, and potential misuse. Engaging with these concerns would strengthen the paper's overall contribution.
Conclusion
Overall, this work represents an important step forward in the field of egocentric video understanding. The AlanaVLM model and the EVUD dataset provide a strong foundation for future research in this domain, with potential applications in areas like robotics, augmented reality, and assistive technology.
By continuing to push the boundaries of multimodal AI and embodied intelligence, the authors of this paper are helping to bring us closer to the vision of AI systems that can seamlessly interact with the world from a first-person perspective. As this technology continues to advance, it will be crucial to carefully consider the ethical implications and ensure that it is developed and deployed responsibly.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👁️
GPT4Ego: Unleashing the Potential of Pre-trained Models for Zero-Shot Egocentric Action Recognition
Guangzhao Dai, Xiangbo Shu, Wenhao Wu, Rui Yan, Jiachao Zhang
0
0
Vision-Language Models (VLMs), pre-trained on large-scale datasets, have shown impressive performance in various visual recognition tasks. This advancement paves the way for notable performance in Zero-Shot Egocentric Action Recognition (ZS-EAR). Typically, VLMs handle ZS-EAR as a global video-text matching task, which often leads to suboptimal alignment of vision and linguistic knowledge. We propose a refined approach for ZS-EAR using VLMs, emphasizing fine-grained concept-description alignment that capitalizes on the rich semantic and contextual details in egocentric videos. In this paper, we introduce GPT4Ego, a straightforward yet remarkably potent VLM framework for ZS-EAR, designed to enhance the fine-grained alignment of concept and description between vision and language. Extensive experiments demonstrate GPT4Ego significantly outperforms existing VLMs on three large-scale egocentric video benchmarks, i.e., EPIC-KITCHENS-100 (33.2%, +9.4%), EGTEA (39.6%, +5.5%), and CharadesEgo (31.5%, +2.6%).
5/14/2024
🔍
Embodied Multi-Modal Agent trained by an LLM from a Parallel TextWorld
Yijun Yang, Tianyi Zhou, Kanxue Li, Dapeng Tao, Lusong Li, Li Shen, Xiaodong He, Jing Jiang, Yuhui Shi
0
0
While large language models (LLMs) excel in a simulated world of texts, they struggle to interact with the more realistic world without perceptions of other modalities such as visual or audio signals. Although vision-language models (VLMs) integrate LLM modules (1) aligned with static image features, and (2) may possess prior knowledge of world dynamics (as demonstrated in the text world), they have not been trained in an embodied visual world and thus cannot align with its dynamics. On the other hand, training an embodied agent in a noisy visual world without expert guidance is often challenging and inefficient. In this paper, we train a VLM agent living in a visual world using an LLM agent excelling in a parallel text world. Specifically, we distill LLM's reflection outcomes (improved actions by analyzing mistakes) in a text world's tasks to finetune the VLM on the same tasks of the visual world, resulting in an Embodied Multi-Modal Agent (EMMA) quickly adapting to the visual world dynamics. Such cross-modality imitation learning between the two parallel worlds is achieved by a novel DAgger-DPO algorithm, enabling EMMA to generalize to a broad scope of new tasks without any further guidance from the LLM expert. Extensive evaluations on the ALFWorld benchmark's diverse tasks highlight EMMA's superior performance to SOTA VLM-based agents, e.g., 20%-70% improvement in the success rate.
4/1/2024

Retrieval-Augmented Egocentric Video Captioning
Jilan Xu, Yifei Huang, Junlin Hou, Guo Chen, Yuejie Zhang, Rui Feng, Weidi Xie
0
0
Understanding human actions from videos of first-person view poses significant challenges. Most prior approaches explore representation learning on egocentric videos only, while overlooking the potential benefit of exploiting existing large-scale third-person videos. In this paper, (1) we develop EgoInstructor, a retrieval-augmented multimodal captioning model that automatically retrieves semantically relevant third-person instructional videos to enhance the video captioning of egocentric videos. (2) For training the cross-view retrieval module, we devise an automatic pipeline to discover ego-exo video pairs from distinct large-scale egocentric and exocentric datasets. (3) We train the cross-view retrieval module with a novel EgoExoNCE loss that pulls egocentric and exocentric video features closer by aligning them to shared text features that describe similar actions. (4) Through extensive experiments, our cross-view retrieval module demonstrates superior performance across seven benchmarks. Regarding egocentric video captioning, EgoInstructor exhibits significant improvements by leveraging third-person videos as references. Project page is available at: https://jazzcharles.github.io/Egoinstructor/
6/21/2024
🤖
A Survey on Vision-Language-Action Models for Embodied AI
Yueen Ma, Zixing Song, Yuzheng Zhuang, Jianye Hao, Irwin King
0
0
Deep learning has demonstrated remarkable success across many domains, including computer vision, natural language processing, and reinforcement learning. Representative artificial neural networks in these fields span convolutional neural networks, Transformers, and deep Q-networks. Built upon unimodal neural networks, numerous multi-modal models have been introduced to address a range of tasks such as visual question answering, image captioning, and speech recognition. The rise of instruction-following robotic policies in embodied AI has spurred the development of a novel category of multi-modal models known as vision-language-action models (VLAs). Their multi-modality capability has become a foundational element in robot learning. Various methods have been proposed to enhance traits such as versatility, dexterity, and generalizability. Some models focus on refining specific components through pretraining. Others aim to develop control policies adept at predicting low-level actions. Certain VLAs serve as high-level task planners capable of decomposing long-horizon tasks into executable subtasks. Over the past few years, a myriad of VLAs have emerged, reflecting the rapid advancement of embodied AI. Therefore, it is imperative to capture the evolving landscape through a comprehensive survey.
5/24/2024