GPT4Ego: Unleashing the Potential of Pre-trained Models for Zero-Shot Egocentric Action Recognition
2401.10039
0
0
👁️
Abstract
Vision-Language Models (VLMs), pre-trained on large-scale datasets, have shown impressive performance in various visual recognition tasks. This advancement paves the way for notable performance in Zero-Shot Egocentric Action Recognition (ZS-EAR). Typically, VLMs handle ZS-EAR as a global video-text matching task, which often leads to suboptimal alignment of vision and linguistic knowledge. We propose a refined approach for ZS-EAR using VLMs, emphasizing fine-grained concept-description alignment that capitalizes on the rich semantic and contextual details in egocentric videos. In this paper, we introduce GPT4Ego, a straightforward yet remarkably potent VLM framework for ZS-EAR, designed to enhance the fine-grained alignment of concept and description between vision and language. Extensive experiments demonstrate GPT4Ego significantly outperforms existing VLMs on three large-scale egocentric video benchmarks, i.e., EPIC-KITCHENS-100 (33.2%, +9.4%), EGTEA (39.6%, +5.5%), and CharadesEgo (31.5%, +2.6%).
Create account to get full access
Overview
- Leveraging YOLO and GPT-4V for Zero-Shot Video Captioning
- Exploring the Grounding Potential of Vision-Language Models for Quantifying Grounding
- Retrieval-Enhanced Zero-Shot Video Captioning
- GPT-4V and Robotics: Multimodal Task Planning from Language
Plain English Explanation
This blog post provides a plain English summary of several research papers related to advancements in artificial intelligence (AI) and machine learning. The papers explore topics such as zero-shot video captioning, grounding vision-language models, and multimodal task planning from language.
The core ideas focus on developing AI systems that can understand and interact with the world in more natural and intuitive ways, using techniques like leveraging YOLO and GPT-4V for video captioning. The researchers explore ways to enhance the grounding and reasoning capabilities of these models, making them more effective at tasks like quantifying grounding and planning robotic actions from language input.
The technical explanations delve into the specific experiment designs, architectural choices, and key insights uncovered by the researchers. These advancements have the potential to significantly impact fields like computer vision, natural language processing, and robotics, leading to more intelligent and capable AI systems that can better understand and interact with the world around them.
Technical Explanation
The paper "Leveraging YOLO and GPT-4V for Zero-Shot Video Captioning" explores the use of the YOLO object detection model and the GPT-4V language model to tackle the challenge of zero-shot video captioning. The researchers propose a novel approach that combines the strengths of these two models to generate captions for videos without any prior training on that specific video content.
The "Exploring the Grounding Potential of Vision-Language Models for Quantifying Grounding" paper delves into the challenge of understanding how vision-language models, such as GPT-4V, ground their language to the visual world. The researchers introduce a new benchmark, Q-GroundCam, to quantify the grounding capabilities of these models and provide insights into their inner workings.
The "Retrieval-Enhanced Zero-Shot Video Captioning" paper explores a different approach to zero-shot video captioning, leveraging retrieval-based techniques to generate captions without any prior training on the target video content. The researchers demonstrate how this approach can outperform traditional generation-based methods in certain scenarios.
Finally, the "GPT-4V and Robotics: Multimodal Task Planning from Language" paper investigates the potential of the GPT-4V model to engage in multimodal task planning, where language input is used to guide robotic actions and decision-making. The researchers explore how this model can be effectively grounded in the physical world to perform complex tasks.
Critical Analysis
The papers presented showcase exciting advancements in AI and machine learning, particularly in the realm of vision-language understanding and multimodal reasoning. However, it's important to acknowledge some potential caveats and areas for further research.
The zero-shot video captioning approaches, while promising, may still struggle with generating high-quality captions for complex or ambiguous video content. Additional research is needed to improve the robustness and generalization capabilities of these models.
The grounding evaluation benchmark introduced in the "Exploring the Grounding Potential of Vision-Language Models" paper is a valuable contribution, but its limitations should be noted. The researchers acknowledge that their approach may not capture the full breadth of grounding abilities, and further research is needed to develop more comprehensive evaluation methods.
While the multimodal task planning from language shows exciting potential, the integration of language-based reasoning with physical robot actions remains a significant challenge. Ensuring safe and reliable execution of these plans in the real world will require extensive testing and validation.
Overall, these papers represent important steps forward in the field of AI, but continued research and development will be necessary to address the remaining challenges and unlock the full potential of these technologies.
Conclusion
The research papers explored in this blog post demonstrate the rapid advancements being made in the field of artificial intelligence, particularly in areas such as zero-shot video captioning, grounding vision-language models, and multimodal task planning from language.
By leveraging YOLO and GPT-4V, researchers are developing innovative techniques to enable AI systems to better understand and interact with the world around them. These advancements hold the potential to significantly impact a wide range of industries, from computer vision and natural language processing to robotics and beyond.
As the field of AI continues to evolve, it will be crucial to address the remaining challenges and limitations highlighted in the critical analysis. Continued research and development will be necessary to ensure the safe and reliable deployment of these technologies, ultimately leading to more intelligent and capable AI systems that can positively transform our world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
AlanaVLM: A Multimodal Embodied AI Foundation Model for Egocentric Video Understanding
Alessandro Suglia, Claudio Greco, Katie Baker, Jose L. Part, Ioannis Papaioannou, Arash Eshghi, Ioannis Konstas, Oliver Lemon
0
0
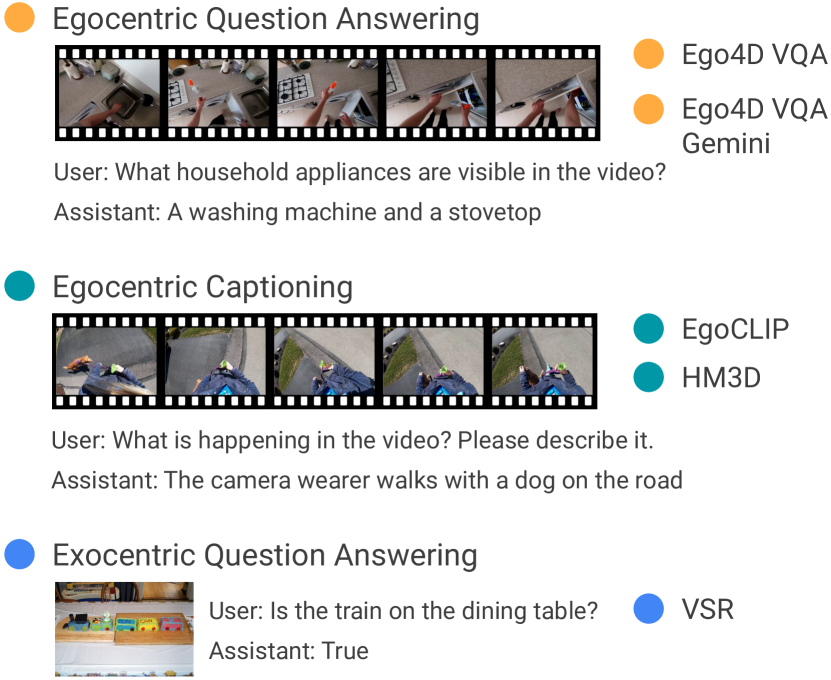
AI personal assistants deployed via robots or wearables require embodied understanding to collaborate with humans effectively. However, current Vision-Language Models (VLMs) primarily focus on third-person view videos, neglecting the richness of egocentric perceptual experience. To address this gap, we propose three key contributions. First, we introduce the Egocentric Video Understanding Dataset (EVUD) for training VLMs on video captioning and question answering tasks specific to egocentric videos. Second, we present AlanaVLM, a 7B parameter VLM trained using parameter-efficient methods on EVUD. Finally, we evaluate AlanaVLM's capabilities on OpenEQA, a challenging benchmark for embodied video question answering. Our model achieves state-of-the-art performance, outperforming open-source models including strong Socratic models using GPT-4 as a planner by 3.6%. Additionally, we outperform Claude 3 and Gemini Pro Vision 1.0 and showcase competitive results compared to Gemini Pro 1.5 and GPT-4V, even surpassing the latter in spatial reasoning. This research paves the way for building efficient VLMs that can be deployed in robots or wearables, leveraging embodied video understanding to collaborate seamlessly with humans in everyday tasks, contributing to the next generation of Embodied AI.
6/24/2024

Benchmarking Zero-Shot Recognition with Vision-Language Models: Challenges on Granularity and Specificity
Zhenlin Xu, Yi Zhu, Tiffany Deng, Abhay Mittal, Yanbei Chen, Manchen Wang, Paolo Favaro, Joseph Tighe, Davide Modolo
0
0
This paper presents novel benchmarks for evaluating vision-language models (VLMs) in zero-shot recognition, focusing on granularity and specificity. Although VLMs excel in tasks like image captioning, they face challenges in open-world settings. Our benchmarks test VLMs' consistency in understanding concepts across semantic granularity levels and their response to varying text specificity. Findings show that VLMs favor moderately fine-grained concepts and struggle with specificity, often misjudging texts that differ from their training data. Extensive evaluations reveal limitations in current VLMs, particularly in distinguishing between correct and subtly incorrect descriptions. While fine-tuning offers some improvements, it doesn't fully address these issues, highlighting the need for VLMs with enhanced generalization capabilities for real-world applications. This study provides insights into VLM limitations and suggests directions for developing more robust models.
6/19/2024

Leveraging YOLO-World and GPT-4V LMMs for Zero-Shot Person Detection and Action Recognition in Drone Imagery
Christian Limberg, Artur Gonc{c}alves, Bastien Rigault, Helmut Prendinger
0
0
In this article, we explore the potential of zero-shot Large Multimodal Models (LMMs) in the domain of drone perception. We focus on person detection and action recognition tasks and evaluate two prominent LMMs, namely YOLO-World and GPT-4V(ision) using a publicly available dataset captured from aerial views. Traditional deep learning approaches rely heavily on large and high-quality training datasets. However, in certain robotic settings, acquiring such datasets can be resource-intensive or impractical within a reasonable timeframe. The flexibility of prompt-based Large Multimodal Models (LMMs) and their exceptional generalization capabilities have the potential to revolutionize robotics applications in these scenarios. Our findings suggest that YOLO-World demonstrates good detection performance. GPT-4V struggles with accurately classifying action classes but delivers promising results in filtering out unwanted region proposals and in providing a general description of the scenery. This research represents an initial step in leveraging LMMs for drone perception and establishes a foundation for future investigations in this area.
4/3/2024
Exploring the Zero-Shot Capabilities of Vision-Language Models for Improving Gaze Following
Anshul Gupta, Pierre Vuillecard, Arya Farkhondeh, Jean-Marc Odobez
0
0
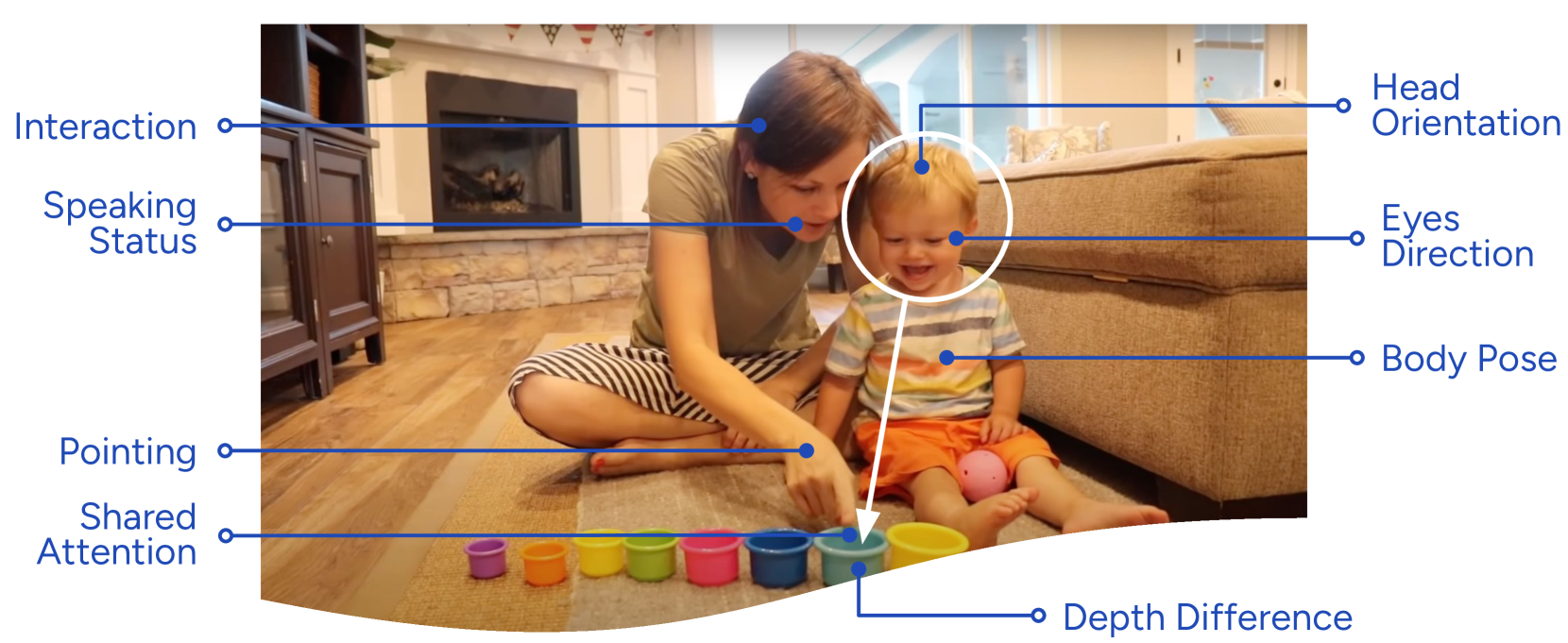
Contextual cues related to a person's pose and interactions with objects and other people in the scene can provide valuable information for gaze following. While existing methods have focused on dedicated cue extraction methods, in this work we investigate the zero-shot capabilities of Vision-Language Models (VLMs) for extracting a wide array of contextual cues to improve gaze following performance. We first evaluate various VLMs, prompting strategies, and in-context learning (ICL) techniques for zero-shot cue recognition performance. We then use these insights to extract contextual cues for gaze following, and investigate their impact when incorporated into a state of the art model for the task. Our analysis indicates that BLIP-2 is the overall top performing VLM and that ICL can improve performance. We also observe that VLMs are sensitive to the choice of the text prompt although ensembling over multiple text prompts can provide more robust performance. Additionally, we discover that using the entire image along with an ellipse drawn around the target person is the most effective strategy for visual prompting. For gaze following, incorporating the extracted cues results in better generalization performance, especially when considering a larger set of cues, highlighting the potential of this approach.
6/7/2024