Amodal Ground Truth and Completion in the Wild

0

Sign in to get full access
Overview
- The paper introduces the MP3D-Amodal dataset, a large-scale dataset for amodal instance segmentation in 3D indoor scenes.
- Amodal instance segmentation is the task of detecting and segmenting objects in a scene, including those that are partially occluded or outside the field of view.
- The MP3D-Amodal dataset provides dense amodal annotations for over 250,000 instances across 90 object categories in the Matterport3D indoor dataset.
Plain English Explanation
The paper describes a new dataset called MP3D-Amodal that can be used to train AI models to better understand and perceive 3D indoor scenes. In a typical image or 3D scene, some objects may be partially hidden or outside the camera's view. Amodal instance segmentation is the task of detecting and outlining these "hidden" objects, even if they are not fully visible.
The MP3D-Amodal dataset provides detailed annotations for over 250,000 objects in 3D indoor environments, including information about which parts of the objects are visible and which are occluded or outside the frame. This allows AI models to learn how to infer the full shape and location of objects, even when only parts of them are shown.
By having access to this rich dataset, researchers and developers can create more advanced computer vision and scene understanding models that can better perceive the complete 3D world around them, rather than just the visible surfaces. This could enable more robust and intelligent applications in areas like robotics, augmented reality, and autonomous vehicles.
Technical Explanation
The MP3D-Amodal dataset builds on the existing Matterport3D indoor dataset by providing dense amodal instance segmentation annotations for over 250,000 object instances across 90 categories. Amodal instance segmentation goes beyond traditional instance segmentation by also identifying and outlining the full extent of each object, including parts that are occluded or outside the camera's field of view.
To create the MP3D-Amodal dataset, the researchers leveraged the rich 3D scene reconstructions and camera pose information in Matterport3D. They then developed a semi-automatic annotation pipeline to efficiently generate high-quality amodal instance segmentation labels. This involved using object proposals, human labeling, and careful editing to capture the complete 3D extent of each object.
The resulting dataset provides a valuable resource for training and benchmarking amodal instance segmentation models. The researchers demonstrate the utility of the dataset by training a state-of-the-art 3D instance segmentation model and extending it to the amodal setting. Their results show that amodal reasoning can significantly improve performance on occluded and truncated objects compared to standard instance segmentation.
The MP3D-Amodal dataset complements other recent efforts in 3D scene understanding, such as the PARIS3D and WALT3D datasets, as well as the 3D Open Vocabulary Panoptic Segmentation task. Together, these resources are helping to advance the state of the art in perceiving and reasoning about the complete 3D world, beyond just the visible surfaces.
Critical Analysis
The MP3D-Amodal dataset provides a valuable contribution to the field of 3D scene understanding. By capturing the full amodal extent of objects, including occluded and truncated parts, the dataset enables the development of more capable AI models that can better perceive the complete 3D environment.
One potential limitation of the dataset is the reliance on the existing Matterport3D dataset, which may not fully represent the diversity of indoor environments. The researchers acknowledge this and suggest that future work could explore extending the amodal annotations to other 3D scene datasets.
Additionally, while the dataset provides dense amodal instance segmentation annotations, it does not include other types of 3D scene understanding annotations, such as semantic segmentation or object affordances. Expanding the dataset to include these additional annotations could further broaden its utility for AI researchers and developers.
Overall, the MP3D-Amodal dataset represents an important step forward in creating comprehensive 3D scene understanding benchmarks. By enabling models to perceive the world more holistically, this work has the potential to unlock new capabilities in domains like robotics, augmented reality, and autonomous driving.
Conclusion
The MP3D-Amodal dataset introduced in this paper is a significant contribution to the field of 3D scene understanding. By providing dense amodal instance segmentation annotations for over 250,000 objects in indoor environments, the dataset enables the development of AI models that can better perceive and reason about the complete 3D world, including occluded and truncated parts of objects.
This work complements other recent advances in 3D scene understanding, such as semantic segmentation and part-based reasoning. Together, these efforts are pushing the boundaries of what AI systems can understand about the 3D environments around them. The potential applications of this technology are wide-ranging, from more capable robots and autonomous vehicles to immersive augmented reality experiences.
While the MP3D-Amodal dataset has some limitations, it represents an important milestone in creating the comprehensive 3D scene understanding benchmarks needed to drive further progress in this field. As researchers and developers continue to build on this work, we can expect to see increasingly intelligent and capable AI systems that can perceive the world in ever more sophisticated ways.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Amodal Ground Truth and Completion in the Wild
Guanqi Zhan, Chuanxia Zheng, Weidi Xie, Andrew Zisserman
This paper studies amodal image segmentation: predicting entire object segmentation masks including both visible and invisible (occluded) parts. In previous work, the amodal segmentation ground truth on real images is usually predicted by manual annotaton and thus is subjective. In contrast, we use 3D data to establish an automatic pipeline to determine authentic ground truth amodal masks for partially occluded objects in real images. This pipeline is used to construct an amodal completion evaluation benchmark, MP3D-Amodal, consisting of a variety of object categories and labels. To better handle the amodal completion task in the wild, we explore two architecture variants: a two-stage model that first infers the occluder, followed by amodal mask completion; and a one-stage model that exploits the representation power of Stable Diffusion for amodal segmentation across many categories. Without bells and whistles, our method achieves a new state-of-the-art performance on Amodal segmentation datasets that cover a large variety of objects, including COCOA and our new MP3D-Amodal dataset. The dataset, model, and code are available at https://www.robots.ox.ac.uk/~vgg/research/amodal/.
Read more4/30/2024

0
Sequential Amodal Segmentation via Cumulative Occlusion Learning
Jiayang Ao, Qiuhong Ke, Krista A. Ehinger
To fully understand the 3D context of a single image, a visual system must be able to segment both the visible and occluded regions of objects, while discerning their occlusion order. Ideally, the system should be able to handle any object and not be restricted to segmenting a limited set of object classes, especially in robotic applications. Addressing this need, we introduce a diffusion model with cumulative occlusion learning designed for sequential amodal segmentation of objects with uncertain categories. This model iteratively refines the prediction using the cumulative mask strategy during diffusion, effectively capturing the uncertainty of invisible regions and adeptly reproducing the complex distribution of shapes and occlusion orders of occluded objects. It is akin to the human capability for amodal perception, i.e., to decipher the spatial ordering among objects and accurately predict complete contours for occluded objects in densely layered visual scenes. Experimental results across three amodal datasets show that our method outperforms established baselines.
Read more5/10/2024

0
TAO-Amodal: A Benchmark for Tracking Any Object Amodally
Cheng-Yen Hsieh, Kaihua Chen, Achal Dave, Tarasha Khurana, Deva Ramanan
Amodal perception, the ability to comprehend complete object structures from partial visibility, is a fundamental skill, even for infants. Its significance extends to applications like autonomous driving, where a clear understanding of heavily occluded objects is essential. However, modern detection and tracking algorithms often overlook this critical capability, perhaps due to the prevalence of textit{modal} annotations in most benchmarks. To address the scarcity of amodal benchmarks, we introduce TAO-Amodal, featuring 833 diverse categories in thousands of video sequences. Our dataset includes textit{amodal} and modal bounding boxes for visible and partially or fully occluded objects, including those that are partially out of the camera frame. We investigate the current lay of the land in both amodal tracking and detection by benchmarking state-of-the-art modal trackers and amodal segmentation methods. We find that existing methods, even when adapted for amodal tracking, struggle to detect and track objects under heavy occlusion. To mitigate this, we explore simple finetuning schemes that can increase the amodal tracking and detection metrics of occluded objects by 2.1% and 3.3%.
Read more4/4/2024
0
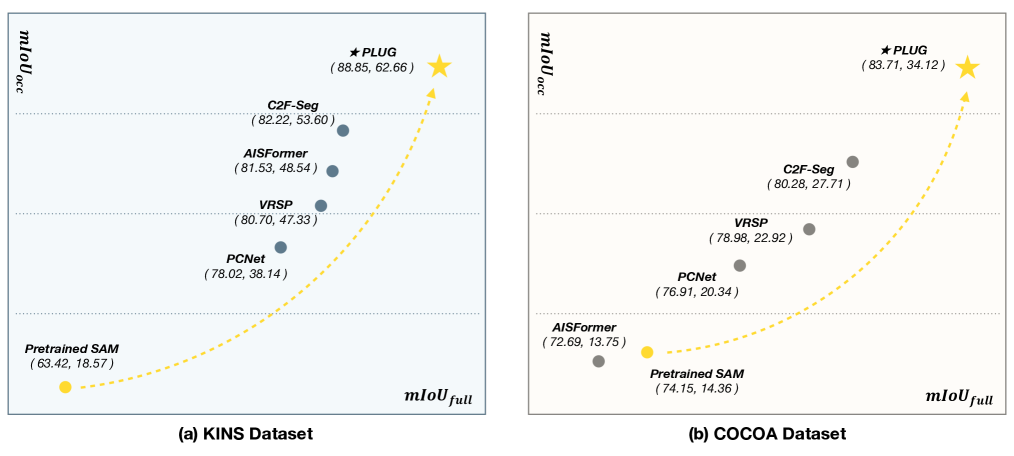
PLUG: Revisiting Amodal Segmentation with Foundation Model and Hierarchical Focus
Zhaochen Liu, Limeng Qiao, Xiangxiang Chu, Tingting Jiang
Aiming to predict the complete shapes of partially occluded objects, amodal segmentation is an important step towards visual intelligence. With crucial significance, practical prior knowledge derives from sufficient training, while limited amodal annotations pose challenges to achieve better performance. To tackle this problem, utilizing the mighty priors accumulated in the foundation model, we propose the first SAM-based amodal segmentation approach, PLUG. Methodologically, a novel framework with hierarchical focus is presented to better adapt the task characteristics and unleash the potential capabilities of SAM. In the region level, due to the association and division in visible and occluded areas, inmodal and amodal regions are assigned as the focuses of distinct branches to avoid mutual disturbance. In the point level, we introduce the concept of uncertainty to explicitly assist the model in identifying and focusing on ambiguous points. Guided by the uncertainty map, a computation-economic point loss is applied to improve the accuracy of predicted boundaries. Experiments are conducted on several prominent datasets, and the results show that our proposed method outperforms existing methods with large margins. Even with fewer total parameters, our method still exhibits remarkable advantages.
Read more6/4/2024