Are Synthetic Data Useful for Egocentric Hand-Object Interaction Detection?

0
📊
Sign in to get full access
Overview
- This study investigates how synthetic data can be used to improve the detection of hand-object interactions in egocentric (first-person) videos.
- Extensive experiments are conducted on three egocentric datasets: VISOR, EgoHOS, and ENIGMA-51.
- The findings reveal how to effectively use synthetic data for hand-object interaction (HOI) detection when real labeled data is scarce or unavailable.
Plain English Explanation
The researchers wanted to see how well they could use computer-generated, or synthetic, data to help train models to detect hand-object interactions in first-person videos. They had access to three different datasets of egocentric videos, VISOR, EgoHOS, and ENIGMA-51, and they ran extensive tests to figure out the best way to use synthetic data along with the real data.
The key finding is that by using just 10% of the real labeled data and supplementing it with synthetic data, they were able to achieve significant improvements in the overall accuracy of detecting hand-object interactions compared to only using the real data. Specifically, they saw improvements of 5.67% on VISOR, 8.24% on EgoHOS, and 11.69% on ENIGMA-51.
This is important because in many cases, collecting and labeling large amounts of real-world data for tasks like this can be very difficult and time-consuming. By leveraging synthetic data, researchers and developers may be able to train more accurate models while needing much less real data.
Technical Explanation
The researchers developed a novel data generation pipeline and benchmark called HOI-Synth to automatically create synthetic images of hand-object interactions, complete with labeled hand-object contact states, bounding boxes, and pixel-wise segmentation masks.
They then conducted extensive experiments across the three egocentric datasets, VISOR, EgoHOS, and ENIGMA-51, to evaluate the effectiveness of using this synthetic data to enhance hand-object interaction (HOI) detection models.
The results show that by using just 10% of the real labeled data and supplementing it with the synthetic data, the models were able to achieve significant improvements in Overall Average Precision (AP) compared to baselines trained exclusively on the real data. Specifically, they saw:
- +5.67% improvement on VISOR
- +8.24% improvement on EgoHOS
- +11.69% improvement on ENIGMA-51
This demonstrates the power of leveraging synthetic data, especially when real-world labeled data is scarce or difficult to obtain, to boost the performance of HOI detection models.
Critical Analysis
The paper provides a thorough and well-designed study on the use of synthetic data for enhancing egocentric hand-object interaction detection. The researchers acknowledge the potential limitations, such as the need to ensure the synthetic data accurately reflects the real-world distributions and characteristics of the target domains.
Additionally, while the study shows significant improvements in overall AP, it would be valuable to further explore the model's performance on specific types of hand-object interactions, edge cases, or challenging scenarios. Understanding the model's strengths, weaknesses, and failure modes could inform future research and development.
Another area for potential investigation is the scalability and generalizability of the synthetic data generation approach. As the paper mentions, the HOI-Synth benchmark is a valuable resource, but it would be interesting to see how the techniques could be adapted to create synthetic data for a wider range of egocentric tasks, such as 2D hand pose estimation or 3D hand-object interactions.
Overall, this study presents a promising approach to leveraging synthetic data for enhancing egocentric hand-object interaction detection, with potential applications in various fields, such as robotics, augmented reality, and human-computer interaction.
Conclusion
This study demonstrates the effectiveness of using synthetic data to improve the detection of hand-object interactions in egocentric videos. By developing a novel data generation pipeline and benchmark, the researchers were able to show that supplementing real labeled data with as little as 10% of synthetic data can lead to significant performance gains on three different egocentric datasets.
The findings of this research have important implications for fields that rely on accurate hand-object interaction detection, such as robotics, augmented reality, and human-computer interaction. By reducing the need for large amounts of real-world labeled data, the use of synthetic data can make it more feasible to develop and deploy effective models in a wider range of applications.
The researchers have made their data, code, and data generation tools publicly available, which should encourage further research and development in this area. As the field continues to evolve, it will be exciting to see how the techniques and insights from this study can be applied to other egocentric tasks and expanded to address new challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
Are Synthetic Data Useful for Egocentric Hand-Object Interaction Detection?
Rosario Leonardi, Antonino Furnari, Francesco Ragusa, Giovanni Maria Farinella
In this study, we investigate the effectiveness of synthetic data in enhancing egocentric hand-object interaction detection. Via extensive experiments and comparative analyses on three egocentric datasets, VISOR, EgoHOS, and ENIGMA-51, our findings reveal how to exploit synthetic data for the HOI detection task when real labeled data are scarce or unavailable. Specifically, by leveraging only 10% of real labeled data, we achieve improvements in Overall AP compared to baselines trained exclusively on real data of: +5.67% on EPIC-KITCHENS VISOR, +8.24% on EgoHOS, and +11.69% on ENIGMA-51. Our analysis is supported by a novel data generation pipeline and the newly introduced HOI-Synth benchmark which augments existing datasets with synthetic images of hand-object interactions automatically labeled with hand-object contact states, bounding boxes, and pixel-wise segmentation masks. Data, code, and data generation tools to support future research are released at: https://fpv-iplab.github.io/HOI-Synth/.
Read more7/17/2024

0
Gaze-guided Hand-Object Interaction Synthesis: Dataset and Method
Jie Tian, Ran Ji, Lingxiao Yang, Yuexin Ma, Lan Xu, Jingyi Yu, Ye Shi, Jingya Wang
Gaze plays a crucial role in revealing human attention and intention, particularly in hand-object interaction scenarios, where it guides and synchronizes complex tasks that require precise coordination between the brain, hand, and object. Motivated by this, we introduce a novel task: Gaze-Guided Hand-Object Interaction Synthesis, with potential applications in augmented reality, virtual reality, and assistive technologies. To support this task, we present GazeHOI, the first dataset to capture simultaneous 3D modeling of gaze, hand, and object interactions. This task poses significant challenges due to the inherent sparsity and noise in gaze data, as well as the need for high consistency and physical plausibility in generating hand and object motions. To tackle these issues, we propose a stacked gaze-guided hand-object interaction diffusion model, named GHO-Diffusion. The stacked design effectively reduces the complexity of motion generation. We also introduce HOI-Manifold Guidance during the sampling stage of GHO-Diffusion, enabling fine-grained control over generated motions while maintaining the data manifold. Additionally, we propose a spatial-temporal gaze feature encoding for the diffusion condition and select diffusion results based on consistency scores between gaze-contact maps and gaze-interaction trajectories. Extensive experiments highlight the effectiveness of our method and the unique contributions of our dataset.
Read more8/23/2024

0
Benchmarking 2D Egocentric Hand Pose Datasets
Olga Taran, Damian M. Manzone, Jose Zariffa
Hand pose estimation from egocentric video has broad implications across various domains, including human-computer interaction, assistive technologies, activity recognition, and robotics, making it a topic of significant research interest. The efficacy of modern machine learning models depends on the quality of data used for their training. Thus, this work is devoted to the analysis of state-of-the-art egocentric datasets suitable for 2D hand pose estimation. We propose a novel protocol for dataset evaluation, which encompasses not only the analysis of stated dataset characteristics and assessment of data quality, but also the identification of dataset shortcomings through the evaluation of state-of-the-art hand pose estimation models. Our study reveals that despite the availability of numerous egocentric databases intended for 2D hand pose estimation, the majority are tailored for specific use cases. There is no ideal benchmark dataset yet; however, H2O and GANerated Hands datasets emerge as the most promising real and synthetic datasets, respectively.
Read more9/12/2024
0
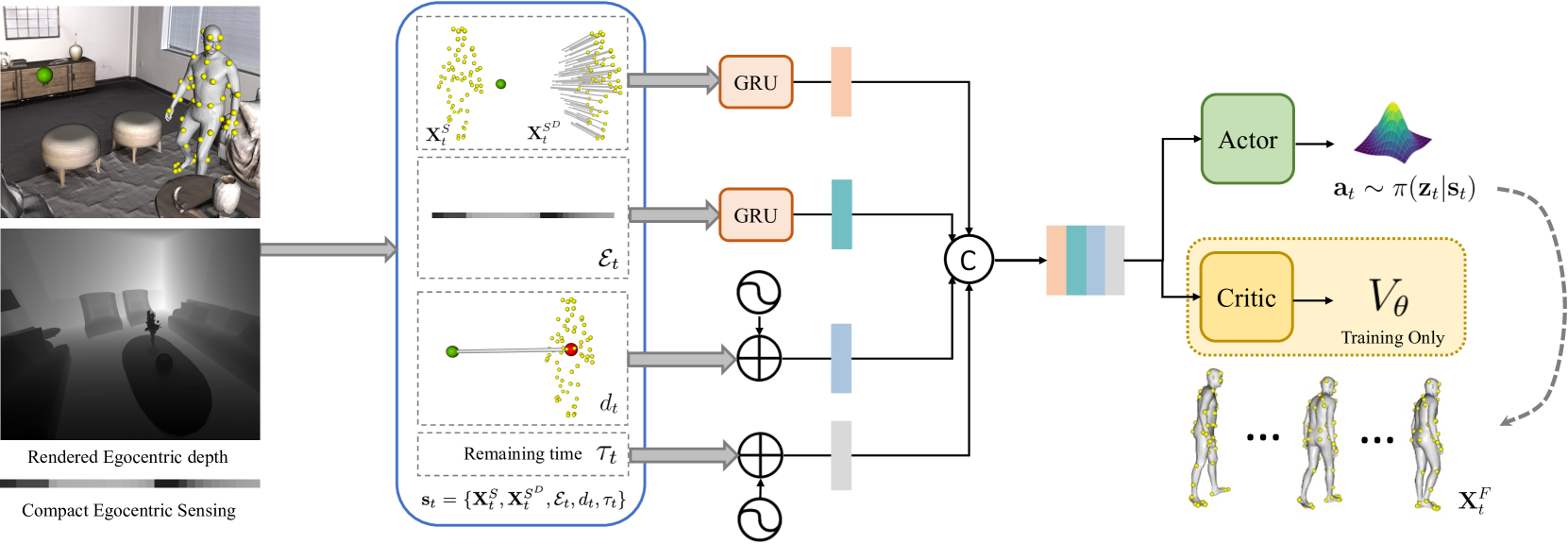
EgoGen: An Egocentric Synthetic Data Generator
Gen Li, Kaifeng Zhao, Siwei Zhang, Xiaozhong Lyu, Mihai Dusmanu, Yan Zhang, Marc Pollefeys, Siyu Tang
Understanding the world in first-person view is fundamental in Augmented Reality (AR). This immersive perspective brings dramatic visual changes and unique challenges compared to third-person views. Synthetic data has empowered third-person-view vision models, but its application to embodied egocentric perception tasks remains largely unexplored. A critical challenge lies in simulating natural human movements and behaviors that effectively steer the embodied cameras to capture a faithful egocentric representation of the 3D world. To address this challenge, we introduce EgoGen, a new synthetic data generator that can produce accurate and rich ground-truth training data for egocentric perception tasks. At the heart of EgoGen is a novel human motion synthesis model that directly leverages egocentric visual inputs of a virtual human to sense the 3D environment. Combined with collision-avoiding motion primitives and a two-stage reinforcement learning approach, our motion synthesis model offers a closed-loop solution where the embodied perception and movement of the virtual human are seamlessly coupled. Compared to previous works, our model eliminates the need for a pre-defined global path, and is directly applicable to dynamic environments. Combined with our easy-to-use and scalable data generation pipeline, we demonstrate EgoGen's efficacy in three tasks: mapping and localization for head-mounted cameras, egocentric camera tracking, and human mesh recovery from egocentric views. EgoGen will be fully open-sourced, offering a practical solution for creating realistic egocentric training data and aiming to serve as a useful tool for egocentric computer vision research. Refer to our project page: https://ego-gen.github.io/.
Read more4/12/2024