Asking Before Acting: Gather Information in Embodied Decision Making with Language Models

0
💬
Sign in to get full access
Overview
- Large Language Models (LLMs) have demonstrated strong reasoning capabilities and a broad understanding of the world, making them promising for building versatile embodied decision-making agents.
- However, when deployed in unfamiliar environments, LLM agents can struggle to efficiently gather essential information, leading to suboptimal performance.
- Inspired by how humans often seek additional information from peers before taking action, the paper proposes a method called "Asking Before Acting" (ABA) that empowers agents to proactively inquire with external sources for pertinent information using natural language.
Plain English Explanation
Large language models are AI systems that have been trained on vast amounts of text data, giving them a deep understanding of language and the world. Researchers have been exploring how to use these powerful models to create "embodied" AI agents - agents that can interact with and navigate through physical environments, like a robot or a character in a video game.
One challenge with these embodied AI agents is that when they're placed in unfamiliar environments, they can struggle to gather all the information they need to make good decisions. They may waste time and effort trying different actions, without a clear understanding of the best approach.
In contrast, humans often seek out additional information from others before taking action in a new situation. We use this external knowledge to avoid unnecessary trial and error. The researchers were inspired by this human behavior and developed a new method called "Asking Before Acting" (ABA).
ABA allows the AI agent to proactively ask questions in natural language to gather relevant information from external sources during its interactions within the environment. This helps the agent become more efficient and effective, as it can avoid getting stuck on difficult exploration tasks or struggling with vague instructions.
The researchers tested ABA in a variety of environments, including household tasks, robot arm manipulation, and real-world image-based tasks. They found that even with relatively simple modifications to the AI model's prompts, ABA showed substantial advantages in both performance and efficiency compared to standard AI agents.
Further refining the ABA approach, by teaching the model the rationale for asking questions, led to even greater improvements, especially in tasks that the baseline models struggled with.
Technical Explanation
The paper explores how large language models (LLMs) can be leveraged to build versatile embodied decision-making agents capable of executing a wide range of tasks. However, the researchers found that when these agents are deployed in unfamiliar environments, they encounter challenges in efficiently gathering essential information, resulting in suboptimal performance.
To address this, the researchers propose a method called "Asking Before Acting" (ABA), which enables the agent to proactively inquire with external sources for pertinent information using natural language during its interactions within the environment. This allows the agent to enhance its efficiency and performance by circumventing potentially laborious exploration steps and overcoming the difficulties associated with vague instructions.
The paper presents extensive experiments across a spectrum of environments, including text-based household tasks, robot arm manipulation, and real-world open-domain image-based embodied tasks. The experiments involved various LLM models, from Vicuna to GPT-4.
The results demonstrate that even with modest prompt modifications, the ABA approach exhibits substantial advantages in both performance and efficiency over baseline LLM agents. Furthermore, fine-tuning the ABA model with reformulated metadata (ABA-FT) facilitates learning the rationale for asking questions, leading to additional enhancements, particularly in tasks where the baseline models struggled.
Critical Analysis
The paper presents a compelling approach to enhancing the capabilities of embodied AI agents by empowering them to proactively seek out relevant information through natural language interaction. The researchers have demonstrated the effectiveness of their "Asking Before Acting" (ABA) method across a diverse range of environments and tasks.
One potential limitation of the research is the scope of the environments and tasks considered. While the experiments cover a spectrum of scenarios, including household tasks, robot manipulation, and open-domain image-based tasks, the paper does not explore the performance of the ABA method in more complex, dynamic, or unstructured environments. Further research may be needed to understand the scalability and generalization of the ABA approach to a broader range of real-world applications.
Additionally, the paper does not delve into the specific details of how the ABA method is implemented and integrated with the underlying LLM architecture. A more comprehensive technical explanation of the implementation details and the integration process could provide valuable insights for researchers and practitioners interested in replicating or extending the work.
Despite these potential limitations, the paper makes a significant contribution to the field of embodied AI agents by demonstrating the value of incorporating natural language interaction and external information gathering capabilities. The findings highlight the importance of developing AI agents that can efficiently navigate unfamiliar environments and leverage contextual knowledge to optimize their decision-making.
Conclusion
The paper presents a novel approach, called "Asking Before Acting" (ABA), that empowers large language model (LLM) agents to proactively gather relevant information from external sources using natural language during their interactions within an environment. The experiments conducted by the researchers demonstrate the substantial advantages of the ABA method in terms of both performance and efficiency, even with modest prompt modifications.
The ability of ABA to circumvent laborious exploration steps and overcome the challenges associated with vagueness in instructions highlights its potential to enhance the capabilities of embodied AI agents across a wide range of applications. By drawing inspiration from how humans seek additional information from their peers, the ABA approach represents an important step towards developing more versatile and intelligent AI systems that can navigate unfamiliar environments effectively.
The findings of this paper have broader implications for the field of embodied AI, suggesting that the integration of natural language interaction and external knowledge gathering can be a valuable strategy for improving the performance and decision-making capabilities of autonomous agents. As the field of AI continues to advance, the principles and techniques explored in this research may contribute to the development of even more capable and adaptable embodied AI systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
Asking Before Acting: Gather Information in Embodied Decision Making with Language Models
Xiaoyu Chen, Shenao Zhang, Pushi Zhang, Li Zhao, Jianyu Chen
With strong capabilities of reasoning and a broad understanding of the world, Large Language Models (LLMs) have demonstrated immense potential in building versatile embodied decision-making agents capable of executing a wide array of tasks. Nevertheless, when deployed in unfamiliar environments, we show that LLM agents encounter challenges in efficiently gathering essential information, leading to suboptimal performance. Conversely, human individuals often seek additional information from their peers prior to taking action, harnessing external knowledge to avoid unnecessary trial and error. Drawing inspiration from this behavior, we propose textit{Asking Before Acting} (ABA), a method that empowers the agent to proactively inquire with external sources for pertinent information using natural language during their interactions within the environment. In this way, the agent is able to enhance its efficiency and performance by circumventing potentially laborious steps and combating the difficulties associated with exploration in unfamiliar environments and vagueness of the instructions. We conduct extensive experiments involving a spectrum of environments including text-based household everyday tasks, robot arm manipulation tasks, and real world open domain image based embodied tasks. The experiments involve various models from Vicuna to GPT-4. The results demonstrate that, even with modest prompts modifications, ABA exhibits substantial advantages on both performance and efficiency over baseline LLM agents. Further finetuning ABA with reformulated metadata (ABA-FT) faciliates learning the rationale for asking and allows for additional enhancements especially in tasks that baselines struggle to solve.
Read more4/17/2024
0
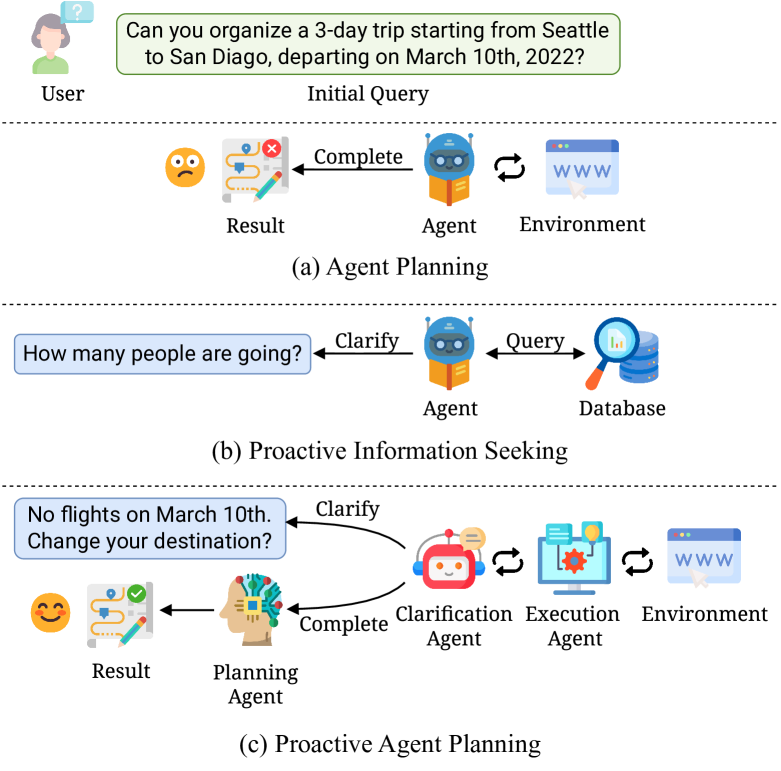
Ask-before-Plan: Proactive Language Agents for Real-World Planning
Xuan Zhang, Yang Deng, Zifeng Ren, See-Kiong Ng, Tat-Seng Chua
The evolution of large language models (LLMs) has enhanced the planning capabilities of language agents in diverse real-world scenarios. Despite these advancements, the potential of LLM-powered agents to comprehend ambiguous user instructions for reasoning and decision-making is still under exploration. In this work, we introduce a new task, Proactive Agent Planning, which requires language agents to predict clarification needs based on user-agent conversation and agent-environment interaction, invoke external tools to collect valid information, and generate a plan to fulfill the user's demands. To study this practical problem, we establish a new benchmark dataset, Ask-before-Plan. To tackle the deficiency of LLMs in proactive planning, we propose a novel multi-agent framework, Clarification-Execution-Planning (texttt{CEP}), which consists of three agents specialized in clarification, execution, and planning. We introduce the trajectory tuning scheme for the clarification agent and static execution agent, as well as the memory recollection mechanism for the dynamic execution agent. Extensive evaluations and comprehensive analyses conducted on the Ask-before-Plan dataset validate the effectiveness of our proposed framework.
Read more6/19/2024
0
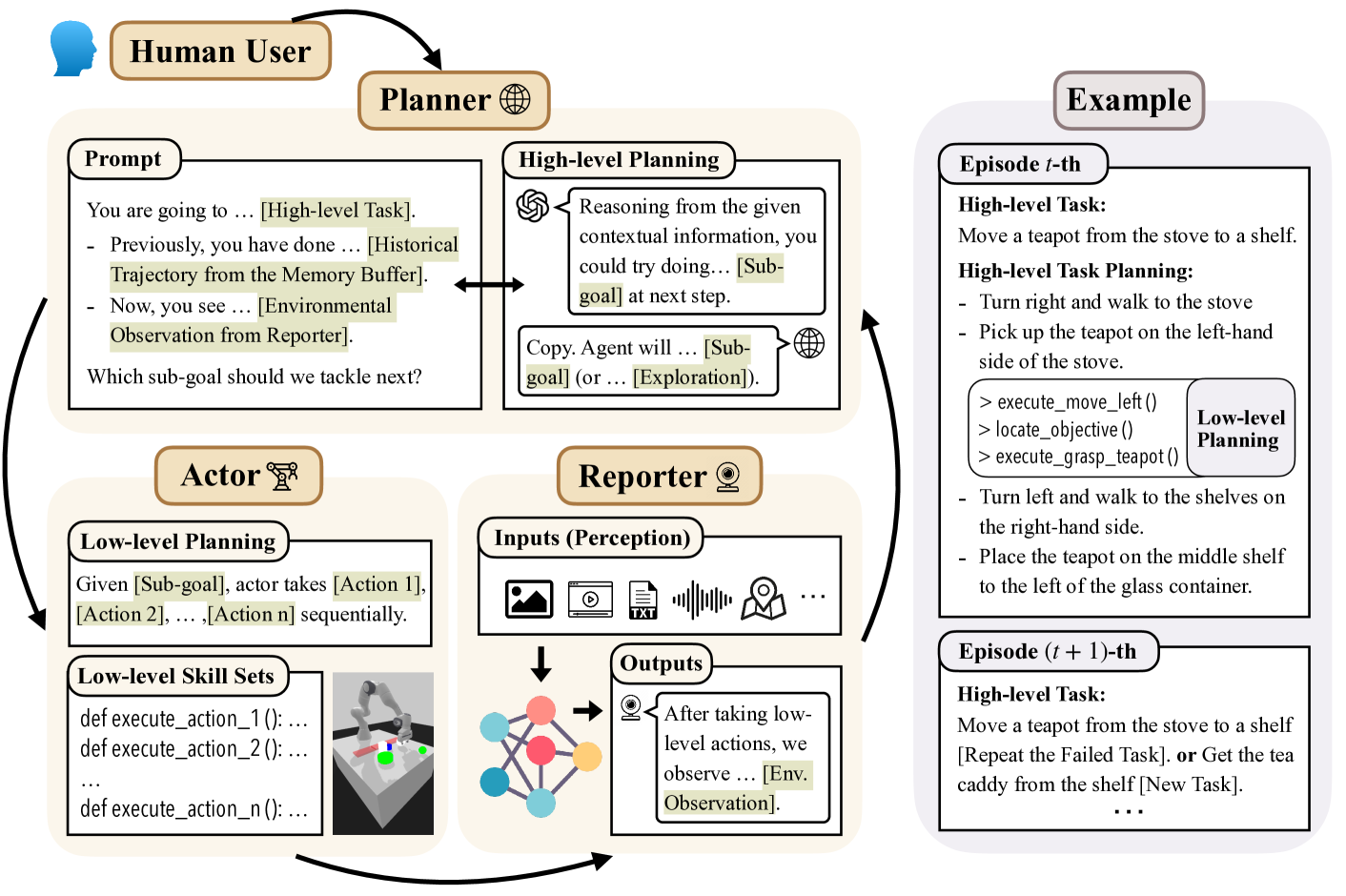
From Words to Actions: Unveiling the Theoretical Underpinnings of LLM-Driven Autonomous Systems
Jianliang He, Siyu Chen, Fengzhuo Zhang, Zhuoran Yang
In this work, from a theoretical lens, we aim to understand why large language model (LLM) empowered agents are able to solve decision-making problems in the physical world. To this end, consider a hierarchical reinforcement learning (RL) model where the LLM Planner and the Actor perform high-level task planning and low-level execution, respectively. Under this model, the LLM Planner navigates a partially observable Markov decision process (POMDP) by iteratively generating language-based subgoals via prompting. Under proper assumptions on the pretraining data, we prove that the pretrained LLM Planner effectively performs Bayesian aggregated imitation learning (BAIL) through in-context learning. Additionally, we highlight the necessity for exploration beyond the subgoals derived from BAIL by proving that naively executing the subgoals returned by LLM leads to a linear regret. As a remedy, we introduce an $epsilon$-greedy exploration strategy to BAIL, which is proven to incur sublinear regret when the pretraining error is small. Finally, we extend our theoretical framework to include scenarios where the LLM Planner serves as a world model for inferring the transition model of the environment and to multi-agent settings, enabling coordination among multiple Actors.
Read more7/23/2024

0
Predicting and Understanding Human Action Decisions: Insights from Large Language Models and Cognitive Instance-Based Learning
Thuy Ngoc Nguyen, Kasturi Jamale, Cleotilde Gonzalez
Large Language Models (LLMs) have demonstrated their capabilities across various tasks, from language translation to complex reasoning. Understanding and predicting human behavior and biases are crucial for artificial intelligence (AI) assisted systems to provide useful assistance, yet it remains an open question whether these models can achieve this. This paper addresses this gap by leveraging the reasoning and generative capabilities of the LLMs to predict human behavior in two sequential decision-making tasks. These tasks involve balancing between exploitative and exploratory actions and handling delayed feedback, both essential for simulating real-life decision processes. We compare the performance of LLMs with a cognitive instance-based learning (IBL) model, which imitates human experiential decision-making. Our findings indicate that LLMs excel at rapidly incorporating feedback to enhance prediction accuracy. In contrast, the cognitive IBL model better accounts for human exploratory behaviors and effectively captures loss aversion bias, i.e., the tendency to choose a sub-optimal goal with fewer step-cost penalties rather than exploring to find the optimal choice, even with limited experience. The results highlight the benefits of integrating LLMs with cognitive architectures, suggesting that this synergy could enhance the modeling and understanding of complex human decision-making patterns.
Read more7/15/2024