ATR-Mapping: Asymmetric Topological Representation based Mapping Framework for Multi-Robot Environment Exploration
2404.18089
0
0
⚙️
Abstract
In recent years, the widespread application of multi-robot systems in areas such as power inspection, autonomous vehicle fleets has made multi-robot technology a research hotspot in the field of robotics. This paper investigates multi-robot cooperative exploration in unknown environments, proposing a training framework and decision strategy based on multi-agent reinforcement learning. Specifically we propose a Asymmetric Topological Representation based mapping framework (ATR-Mapping), combining the advantages of methods based on raw grid maps and methods based on topology, the structural information from the raw grid maps is extracted and combined with a topological graph constructed based on geometric distance information for decision-making. Leveraging this topological graph representation, we employs a decision network based on topological graph matching to assign corresponding boundary points to each robot as long-term target points for decision-making. We conducts testing and application of the proposed algorithms in real world scenarios using the Gazebo and Gibson simulation environments. It validates that the proposed method, when compared to existing methods, achieves a certain degree of performance improvement.
Create account to get full access
Overview
- This paper explores a new approach for multi-robot cooperative exploration in unknown environments using multi-agent reinforcement learning.
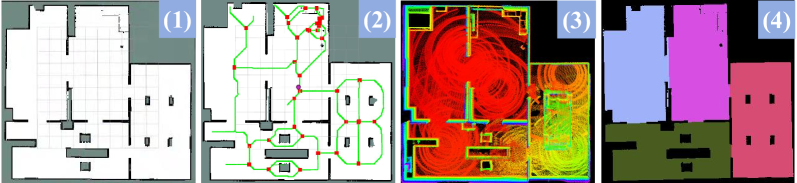
- The proposed framework, called Asymmetric Topological Representation based mapping (ATR-Mapping), combines the strengths of grid-based and topological mapping methods.
- The system uses a decision network based on topological graph matching to assign long-term target points to each robot for exploration.
- The authors validate their approach through testing in simulation environments like Gazebo and Gibson.
Plain English Explanation
The paper focuses on a challenge faced in robotics: how to efficiently coordinate multiple robots to explore and map unknown environments. The researchers developed a new system that allows a team of robots to work together more effectively.
The key idea is to use a combination of two different mapping approaches. Traditional grid-based mapping provides detailed information about the environment, but can be computationally intensive. In contrast, topological mapping represents the environment as a graph, which is more efficient but loses some detail.
The new ATR-Mapping framework takes the best of both approaches. It extracts structural information from the grid map and combines it with a topological graph based on geometric distances. This topological representation is then used to coordinate the robots, assigning each one a long-term exploration target based on matching the graph.
By using this hybrid mapping approach and reinforcement learning to optimize the coordination, the researchers were able to demonstrate improved exploration performance compared to existing methods, as validated through simulation experiments.
The key benefit of this work is that it provides a more effective way for multiple robots to work together to map unknown environments, which has important applications in areas like autonomous vehicle fleets and power line inspection. This could lead to faster, more efficient exploration and mapping of complex real-world environments.
Technical Explanation
The paper proposes a new training framework and decision strategy for multi-robot cooperative exploration based on multi-agent reinforcement learning. At the core of their approach is the Asymmetric Topological Representation based mapping (ATR-Mapping) framework.
ATR-Mapping combines the advantages of grid-based mapping methods, which provide detailed environment information, and topological mapping methods, which are more computationally efficient. The system extracts structural information from the raw grid maps and combines it with a topological graph constructed based on geometric distance information.
Leveraging this topological graph representation, the authors employ a decision network based on topological graph matching to assign long-term target points to each robot for exploration. This allows the robots to coordinate their actions more effectively compared to previous approaches.
The researchers validate their proposed algorithms through extensive testing in the Gazebo and Gibson simulation environments, demonstrating performance improvements over existing multi-robot exploration methods.
Critical Analysis
The paper presents a promising approach for improving the coordination and exploration efficiency of multi-robot systems in unknown environments. The use of a hybrid mapping representation that blends grid-based and topological approaches is a novel contribution.
However, the authors acknowledge some limitations of their work. For example, the performance of the system may degrade in highly dynamic or cluttered environments, where the topological graph representation may not adequately capture the complexity of the surroundings. Further research is needed to address these challenges and ensure the robustness of the system in more diverse real-world scenarios.
Additionally, the paper does not provide a detailed analysis of the computational complexity and resource requirements of the ATR-Mapping framework. As multi-robot systems often operate with limited onboard processing power and battery life, these practical considerations are important for real-world deployment.
Overall, the research presented in this paper represents a valuable contribution to the field of multi-robot exploration and mapping. The hybrid mapping approach and reinforcement learning-based coordination strategy show promise, but additional work is needed to further refine and validate the system's performance in more challenging environments.
Conclusion
This paper introduces a novel framework for multi-robot cooperative exploration in unknown environments, called ATR-Mapping. By combining the strengths of grid-based and topological mapping methods, the system is able to coordinate a team of robots more effectively than previous approaches.
The key innovation is the use of a topological graph representation that captures the structural information of the environment, which is then leveraged by a decision network to assign long-term exploration targets to each robot. This hybrid mapping and coordination strategy has been validated through extensive testing in simulation, demonstrating performance improvements over existing multi-robot exploration techniques.
The potential impact of this research is significant, as efficient multi-robot exploration and mapping is a critical capability for a wide range of applications, from autonomous vehicle fleets to power line inspection. While further work is needed to address the limitations and ensure the robustness of the system, this paper represents an important step forward in the field of multi-robot coordination and exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Robotic Exploration through Semantic Topometric Mapping
Scott Fredriksson, Akshit Saradagi, George Nikolakopoulos
0
0
In this article, we introduce a novel strategy for robotic exploration in unknown environments using a semantic topometric map. As it will be presented, the semantic topometric map is generated by segmenting the grid map of the currently explored parts of the environment into regions, such as intersections, pathways, dead-ends, and unexplored frontiers, which constitute the structural semantics of an environment. The proposed exploration strategy leverages metric information of the frontier, such as distance and angle to the frontier, similar to existing frameworks, with the key difference being the additional utilization of structural semantic information, such as properties of the intersections leading to frontiers. The algorithm for generating semantic topometric mapping utilized by the proposed method is lightweight, resulting in the method's online execution being both rapid and computationally efficient. Moreover, the proposed framework can be applied to both structured and unstructured indoor and outdoor environments, which enhances the versatility of the proposed exploration algorithm. We validate our exploration strategy and demonstrate the utility of structural semantics in exploration in two complex indoor environments by utilizing a Turtlebot3 as the robotic agent. Compared to traditional frontier-based methods, our findings indicate that the proposed approach leads to faster exploration and requires less computation time.
6/27/2024
🛠️
Riemannian Optimization for Active Mapping with Robot Teams
Arash Asgharivaskasi, Fritz Girke, Nikolay Atanasov
0
0
Autonomous exploration of unknown environments using a team of mobile robots demands distributed perception and planning strategies to enable efficient and scalable performance. Ideally, each robot should update its map and plan its motion not only relying on its own observations, but also considering the observations of its peers. Centralized solutions to multi-robot coordination are susceptible to central node failure and require a sophisticated communication infrastructure for reliable operation. Current decentralized active mapping methods consider simplistic robot models with linear-Gaussian observations and Euclidean robot states. In this work, we present a distributed multi-robot mapping and planning method, called Riemannian Optimization for Active Mapping (ROAM). We formulate an optimization problem over a graph with node variables belonging to a Riemannian manifold and a consensus constraint requiring feasible solutions to agree on the node variables. We develop a distributed Riemannian optimization algorithm that relies only on one-hop communication to solve the problem with consensus and optimality guarantees. We show that multi-robot active mapping can be achieved via two applications of our distributed Riemannian optimization over different manifolds: distributed estimation of a 3-D semantic map and distributed planning of SE(3) trajectories that minimize map uncertainty. We demonstrate the performance of ROAM in simulation and real-world experiments using a team of robots with RGB-D cameras.
5/7/2024
Multi-Type Map Construction via Semantics-Aware Autonomous Exploration in Unknown Indoor Environments
Jianfang Mao, Yuheng Xie, Si Chen, Zhixiong Nan, Xiao Wang
0
0
This paper proposes a novel semantics-aware autonomous exploration model to handle the long-standing issue: the mainstream RRT (Rapid-exploration Random Tree) based exploration models usually make the mobile robot switch frequently between different regions, leading to the excessively-repeated explorations for the same region. Our proposed semantics-aware model encourages a mobile robot to fully explore the current region before moving to the next region, which is able to avoid excessively-repeated explorations and make the exploration faster. The core idea of semantics-aware autonomous exploration model is optimizing the sampling point selection mechanism and frontier point evaluation function by considering the semantic information of regions. In addition, compared with existing autonomous exploration methods that usually construct the single-type or 2-3 types of maps, our model allows to construct four kinds of maps including point cloud map, occupancy grid map, topological map, and semantic map. To test the performance of our model, we conducted experiments in three simulated environments. The experiment results demonstrate that compared to Improved RRT, our model achieved 33.0% exploration time reduction and 39.3% exploration trajectory length reduction when maintaining >98% exploration rate.
4/9/2024
📉
Optimal Multilayered Motion Planning for Multiple Differential Drive Mobile Robots with Hierarchical Prioritization (OM-MP)
Zong Chen, Songyuan Fa, Yiqun Li
0
0
We present a novel framework for addressing the challenges of multi-Agent planning and formation control within intricate and dynamic environments. This framework transforms the Multi-Agent Path Finding (MAPF) problem into a Multi-Agent Trajectory Planning (MATP) problem. Unlike traditional MAPF solutions, our multilayer optimization scheme consists of a global planner optimization solver, which is dedicated to determining concise global paths for each individual robot, and a local planner with an embedded optimization solver aimed at ensuring the feasibility of local robot trajectories. By implementing a hierarchical prioritization strategy, we enhance robots' efficiency and approximate the global optimal solution. Specifically, within the global planner, we employ the Augmented Graph Search (AGS) algorithm, which significantly improves the speed of solutions. Meanwhile, within the local planner optimization solver, we utilize Control Barrier functions (CBFs) and introduced an oblique cylindrical obstacle bounding box based on the time axis for obstacle avoidance and construct a single-robot locally aware-communication circle to ensure the simplicity, speed, and accuracy of locally optimized solutions. Additionally, we integrate the weight and priority of path traces to prevent deadlocks in limiting scenarios. Compared to the other state-of-the-art methods, including CBS, ECBS and other derivative algorithms, our proposed method demonstrates superior performance in terms of capacity, flexible scalability and overall task optimality in theory, as validated through simulations and experiments.
5/14/2024