Unified Map Handling for Robotic Systems: Enhancing Interoperability and Efficiency Across Diverse Environments

0

Sign in to get full access
Overview
- This paper presents a novel approach for unified map handling in robotic systems, aiming to enhance interoperability and efficiency across diverse environments.
- The key focus is on developing techniques to enable seamless integration and utilization of environmental information from various sources, including Mapping High-Level Semantic Regions in Indoor Environments, DUFOMap: Efficient Dynamic Awareness Mapping, and Loss-SLAM: Lightweight Open-Set Semantic Simultaneous.
- The proposed approach also addresses challenges in navigating complex environments, such as Under-Canopy Navigation Using Aerial LiDAR Maps and PRISM-TopoMap: Online Topological Mapping and Place Recognition.
Plain English Explanation
This research paper focuses on improving the way robots handle and use information about their surroundings, known as environmental information. The goal is to make it easier for robots to work effectively in a wide range of different environments, from indoor spaces to outdoor natural settings.
The key idea is to develop new techniques that allow robots to seamlessly integrate and utilize environmental data from various sources. This includes information from previous research on mapping high-level semantic regions in indoor environments, efficiently mapping dynamic awareness, and using lightweight open-set semantic simultaneous localization and mapping (SLAM) techniques.
The researchers also address the challenge of navigating complex environments, such as areas with dense vegetation or other obstacles. They explore how robots can use aerial LiDAR (Light Detection and Ranging) maps and online topological mapping with place recognition to better understand and navigate these environments.
By enhancing the robots' ability to handle and use environmental information from diverse sources, the researchers aim to improve the interoperability and efficiency of robotic systems across a variety of real-world settings.
Technical Explanation
The paper proposes a unified approach to map handling in robotic systems, which aims to improve the integration and utilization of environmental information from multiple sources. This includes techniques like Mapping High-Level Semantic Regions in Indoor Environments, DUFOMap: Efficient Dynamic Awareness Mapping, and Loss-SLAM: Lightweight Open-Set Semantic Simultaneous, which provide rich environmental data for robots to leverage.
The researchers also address challenges in navigating complex environments, such as those with dense vegetation, by exploring the use of Under-Canopy Navigation Using Aerial LiDAR Maps and PRISM-TopoMap: Online Topological Mapping and Place Recognition techniques. These approaches enable robots to better understand and navigate through these challenging settings.
The proposed unified map handling framework aims to enhance the interoperability and efficiency of robotic systems across diverse environments, leveraging the advancements in environmental sensing and mapping from previous research.
Critical Analysis
The paper presents a comprehensive approach to addressing the challenges of environmental information handling in robotic systems. However, it is important to note that the proposed techniques may have certain limitations or caveats that are not explicitly discussed in the paper.
For example, the integration of data from various sources, while promising, may introduce additional complexity and potential points of failure. The researchers should consider addressing the robustness and fault-tolerance of the unified map handling system, as well as the computational and memory requirements for real-time operation.
Additionally, the paper does not delve into the specific challenges of handling dynamic and changing environments, which can be a significant hurdle for robotic systems. Further research may be needed to address the adaptability and resilience of the proposed approach in the face of evolving environmental conditions.
Finally, the paper could benefit from a more detailed discussion of the potential societal and ethical implications of these advancements in robotic mapping and navigation, particularly in the context of diverse and complex environments.
Conclusion
This research paper presents a novel approach for unified map handling in robotic systems, aiming to enhance the interoperability and efficiency of these systems across a wide range of environments. By leveraging advancements in environmental sensing and mapping from previous research, the proposed techniques enable seamless integration and utilization of diverse environmental information.
The key contributions of this work include addressing the challenges of navigating complex environments, such as those with dense vegetation, and improving the overall robustness and adaptability of robotic systems to operate effectively in various real-world settings. As the field of robotics continues to evolve, this research provides valuable insights and a framework for enhancing the capabilities of robotic systems to better interact with and understand their surroundings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Unified Map Handling for Robotic Systems: Enhancing Interoperability and Efficiency Across Diverse Environments
James R. Heselden, Gautham P. Das
Mapping is a time-consuming process for deploying robotic systems to new environments. The handling of maps is also risk-adverse when not managed effectively. We propose here, a standardised approach to handling such maps in a manner which focuses on the information contained wherein such as global location, object positions, topology, and occupancy. As part of this approach, associated management scripts are able to assist with generation of maps both through direct and indirect information restructuring, and with template and procedural generation of missing data. These approaches are able to, when combined, improve the handling of maps to enable more efficient deployments and higher interoperability between platforms. Alongside this, a collection of sample datasets of fully-mapped environments are included covering areas such as agriculture, urban roadways, and indoor environments.
Read more4/23/2024
0
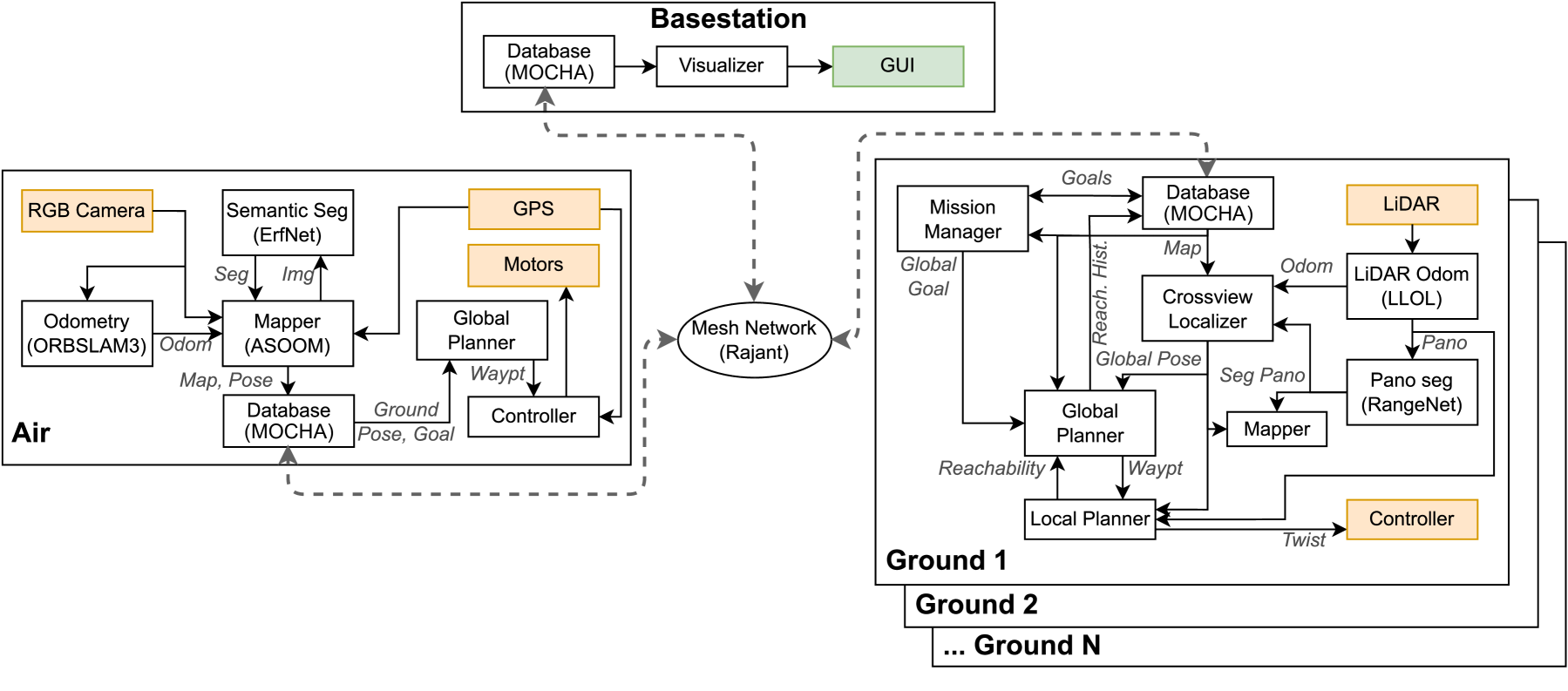
Air-Ground Collaboration with SPOMP: Semantic Panoramic Online Mapping and Planning
Ian D. Miller, Fernando Cladera, Trey Smith, Camillo Jose Taylor, Vijay Kumar
Mapping and navigation have gone hand-in-hand since long before robots existed. Maps are a key form of communication, allowing someone who has never been somewhere to nonetheless navigate that area successfully. In the context of multi-robot systems, the maps and information that flow between robots are necessary for effective collaboration, whether those robots are operating concurrently, sequentially, or completely asynchronously. In this paper, we argue that maps must go beyond encoding purely geometric or visual information to enable increasingly complex autonomy, particularly between robots. We propose a framework for multi-robot autonomy, focusing in particular on air and ground robots operating in outdoor 2.5D environments. We show that semantic maps can enable the specification, planning, and execution of complex collaborative missions, including localization in GPS-denied settings. A distinguishing characteristic of this work is that we strongly emphasize field experiments and testing, and by doing so demonstrate that these ideas can work at scale in the real world. We also perform extensive simulation experiments to validate our ideas at even larger scales. We believe these experiments and the experimental results constitute a significant step forward toward advancing the state-of-the-art of large-scale, collaborative multi-robot systems operating with real communication, navigation, and perception constraints.
Read more7/16/2024
0
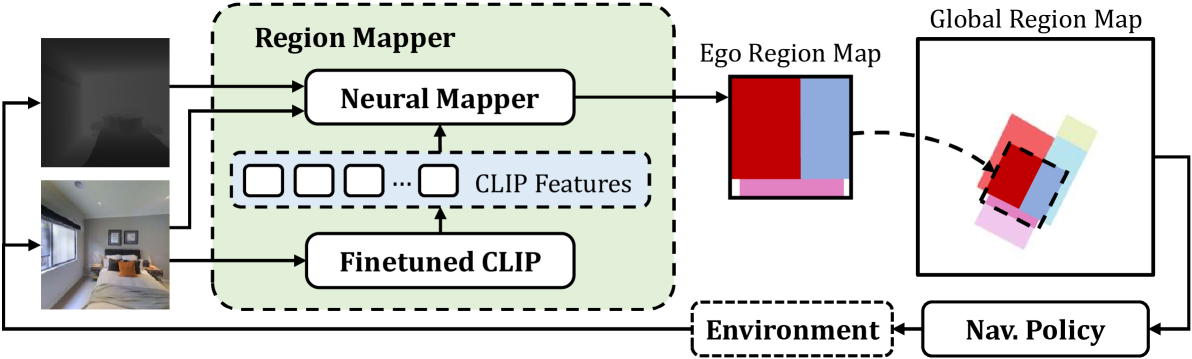
Mapping High-level Semantic Regions in Indoor Environments without Object Recognition
Roberto Bigazzi, Lorenzo Baraldi, Shreyas Kousik, Rita Cucchiara, Marco Pavone
Robots require a semantic understanding of their surroundings to operate in an efficient and explainable way in human environments. In the literature, there has been an extensive focus on object labeling and exhaustive scene graph generation; less effort has been focused on the task of purely identifying and mapping large semantic regions. The present work proposes a method for semantic region mapping via embodied navigation in indoor environments, generating a high-level representation of the knowledge of the agent. To enable region identification, the method uses a vision-to-language model to provide scene information for mapping. By projecting egocentric scene understanding into the global frame, the proposed method generates a semantic map as a distribution over possible region labels at each location. This mapping procedure is paired with a trained navigation policy to enable autonomous map generation. The proposed method significantly outperforms a variety of baselines, including an object-based system and a pretrained scene classifier, in experiments in a photorealistic simulator.
Read more4/16/2024
0
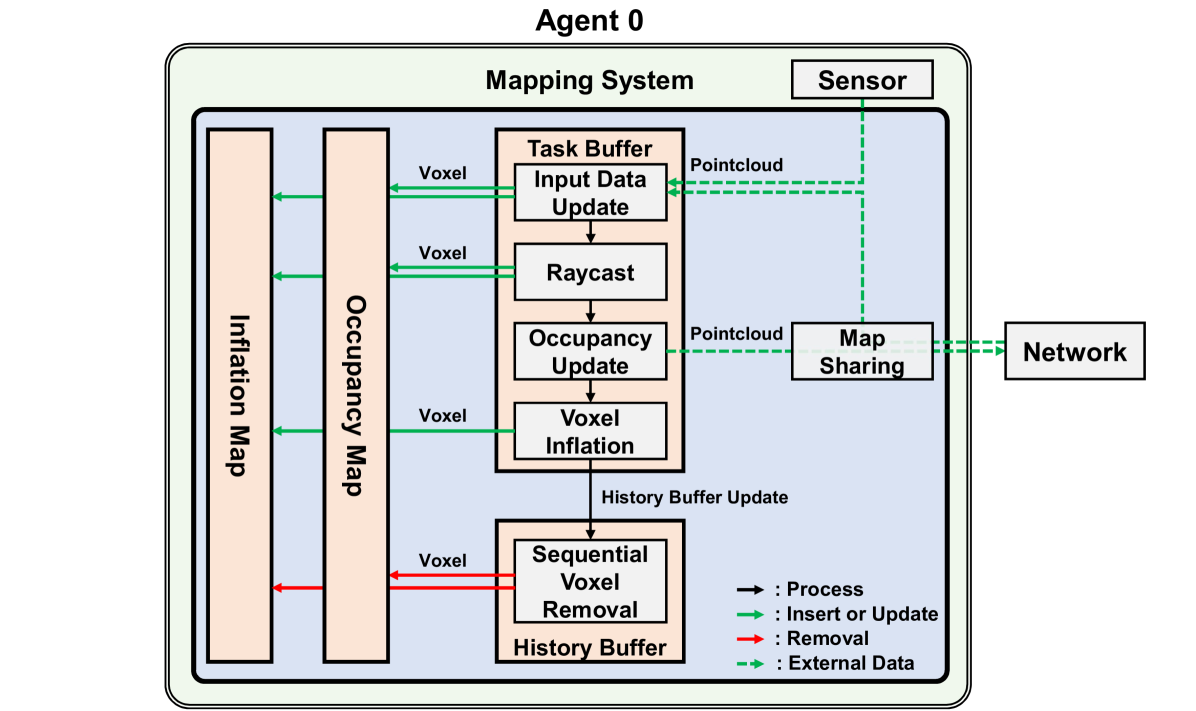
A Robust, Task-Agnostic and Fully-Scalable Voxel Mapping System for Large Scale Environments
Jinche La, Jun-Gill Kang, Dasol Lee
Perception still remains a challenging problem for autonomous navigation in unknown environment, especially for aerial vehicles. Most mapping algorithms for autonomous navigation are specifically designed for their very intended task, which hinders extended usage or cooperative task. In this paper, we propose a voxel mapping system that can build an adaptable map for multiple tasks. The system employs hash table-based map structure and manages each voxel with spatial and temporal priorities without explicit map boundary. We also introduce an efficient map-sharing feature with minimal bandwidth to enable multi-agent applications. We tested the system in real world and simulation environment by applying it for various tasks including local mapping, global mapping, cooperative multi-agent navigation, and high-speed navigation. Our system proved its capability to build customizable map with high resolution, wide coverage, and real-time performance regardless of sensor and environment. The system can build a full-resolution map using the map-sharing feature, with over 95 % of bandwidth reduction from raw sensor data.
Read more9/25/2024