PRISM-TopoMap: Online Topological Mapping with Place Recognition and Scan Matching

0

Sign in to get full access
Overview
- This paper presents PRISM-TopoMap, a system for online topological mapping that combines place recognition and scan matching.
- The system uses a novel place recognition approach based on TSCM: Teacher-Student Curriculum for Vision-Based Place Recognition and Fully Geometric Panoramic Localization to identify revisited locations.
- It also incorporates COMO: Compact Mapping and Odometry for efficient mapping and pose estimation.
- The approach is evaluated on several public datasets and demonstrates improved performance compared to existing methods.
Plain English Explanation
PRISM-TopoMap is a system that helps robots or autonomous vehicles build a map of their surroundings as they explore an area. The key innovations are:
-
Place Recognition: The system can identify when the robot has returned to a location it has seen before, even if the view looks a bit different. This is done using advanced machine learning models trained on TSCM and Fully Geometric Panoramic Localization.
-
Scan Matching: When the robot revisits a place, the system can precisely align the new sensor data with the existing map, allowing it to continuously update and refine the map.
-
Efficient Mapping: The COMO approach is used to compactly represent the map and the robot's estimated position, making the whole system computationally efficient.
The end result is a robust topological map that captures the key landmarks and structure of the robot's environment, which can be useful for navigation, planning, and other autonomous tasks.
Technical Explanation
PRISM-TopoMap is an online topological mapping system that combines place recognition and scan matching to build a detailed map of the robot's environment. The place recognition component uses a novel approach inspired by TSCM and Fully Geometric Panoramic Localization, which allows the system to identify revisited locations even when the appearance of the environment has changed.
When the robot revisits a known location, the system performs scan matching to precisely align the new sensor data with the existing map. This allows the map to be continuously refined and updated as the robot explores. The COMO approach is used to compactly represent the map and the robot's estimated pose, making the overall system computationally efficient.
The performance of PRISM-TopoMap is evaluated on several publicly available datasets, and the results demonstrate improved performance compared to existing topological mapping methods.
Critical Analysis
The authors of the paper acknowledge several limitations and areas for future research:
- The place recognition approach may struggle in highly dynamic environments where the appearance of locations changes significantly over time.
- The scan matching component relies on the availability of accurate depth or 3D sensor data, which may not always be available on low-cost robotic platforms.
- The paper does not provide a comprehensive analysis of the runtime and memory requirements of the system, which could be an important consideration for real-world deployment.
Additionally, the paper does not address potential issues related to the robustness and reliability of the system, such as handling sensor failures, dealing with corrupted or noisy data, or ensuring consistent performance across a wide range of operating conditions.
Further research could explore ways to make the place recognition and mapping components more resilient to environmental changes, as well as investigate techniques for optimizing the computational and memory requirements of the system to enable deployment on a wider range of robotic platforms.
Conclusion
PRISM-TopoMap presents a promising approach for online topological mapping that combines advanced place recognition and scan matching algorithms to build detailed and continuously updated maps of the robot's environment. The system's use of efficient mapping techniques like COMO makes it a computationally feasible solution for real-world autonomous systems.
While the paper highlights several areas for future improvement, the core ideas behind PRISM-TopoMap, such as leveraging state-of-the-art place recognition and scan matching methods, could have significant implications for advancing the field of robotic mapping and navigation. With continued research and development, systems like PRISM-TopoMap could enable more robust and reliable autonomous navigation in complex, dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PRISM-TopoMap: Online Topological Mapping with Place Recognition and Scan Matching
Kirill Muravyev, Alexander Melekhin, Dmitry Yudin, Konstantin Yakovlev
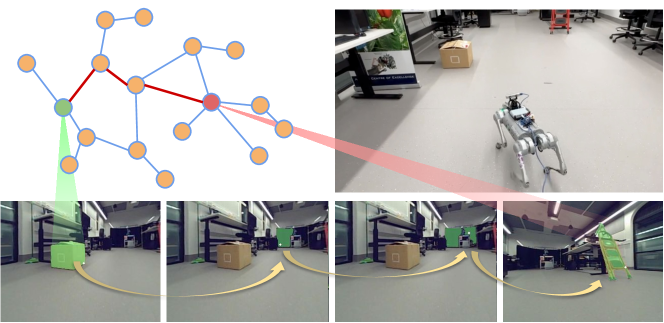
Mapping is one of the crucial tasks enabling autonomous navigation of a mobile robot. Conventional mapping methods output dense geometric map representation, e.g. an occupancy grid, which is not trivial to keep consistent for the prolonged runs covering large environments. Meanwhile, capturing the topological structure of the workspace enables fast path planning, is less prone to odometry error accumulation and does not consume much memory. Following this idea, this paper introduces PRISM-TopoMap -- a topological mapping method that maintains a graph of locally aligned locations not relying on global metric coordinates. The proposed method involves learnable multimodal place recognition paired with the scan matching pipeline for localization and loop closure in the graph of locations. The latter is updated online and the robot is localized in a proper node at each time step. We conduct a broad experimental evaluation of the suggested approach in a range of photo-realistic environments and on a real robot (wheeled differential driven Husky robot), and compare it to state of the art. The results of the empirical evaluation confirm that PRISM-Topomap consistently outperforms competitors across several measures of mapping and navigation efficiency and performs well on a real robot. The code of PRISM-Topomap is open-sourced and available at https://github.com/kirillMouraviev/prism-topomap.
Read more6/12/2024

0
Key-Scan-Based Mobile Robot Navigation: Integrated Mapping, Planning, and Control using Graphs of Scan Regions
Dharshan Bashkaran Latha, Omur Arslan
Safe autonomous navigation in a priori unknown environments is an essential skill for mobile robots to reliably and adaptively perform diverse tasks (e.g., delivery, inspection, and interaction) in unstructured cluttered environments. Hybrid metric-topological maps, constructed as a pose graph of local submaps, offer a computationally efficient world representation for adaptive mapping, planning, and control at the regional level. In this paper, we consider a pose graph of locally sensed star-convex scan regions as a metric-topological map, with star convexity enabling simple yet effective local navigation strategies. We design a new family of safe local scan navigation policies and present a perception-driven feedback motion planning method through the sequential composition of local scan navigation policies, enabling provably correct and safe robot navigation over the union of local scan regions. We introduce a new concept of bridging and frontier scans for automated key scan selection and exploration for integrated mapping and navigation in unknown environments. We demonstrate the effectiveness of our key-scan-based navigation and mapping framework using a mobile robot equipped with a 360$^{circ}$ laser range scanner in 2D cluttered environments through numerical ROS-Gazebo simulations and real hardware~experiments.
Read more9/24/2024
👁️
0
General Place Recognition Survey: Towards Real-World Autonomy
Peng Yin, Jianhao Jiao, Shiqi Zhao, Lingyun Xu, Guoquan Huang, Howie Choset, Sebastian Scherer, Jianda Han
In the realm of robotics, the quest for achieving real-world autonomy, capable of executing large-scale and long-term operations, has positioned place recognition (PR) as a cornerstone technology. Despite the PR community's remarkable strides over the past two decades, garnering attention from fields like computer vision and robotics, the development of PR methods that sufficiently support real-world robotic systems remains a challenge. This paper aims to bridge this gap by highlighting the crucial role of PR within the framework of Simultaneous Localization and Mapping (SLAM) 2.0. This new phase in robotic navigation calls for scalable, adaptable, and efficient PR solutions by integrating advanced artificial intelligence (AI) technologies. For this goal, we provide a comprehensive review of the current state-of-the-art (SOTA) advancements in PR, alongside the remaining challenges, and underscore its broad applications in robotics. This paper begins with an exploration of PR's formulation and key research challenges. We extensively review literature, focusing on related methods on place representation and solutions to various PR challenges. Applications showcasing PR's potential in robotics, key PR datasets, and open-source libraries are discussed. We also emphasizes our open-source package, aimed at new development and benchmark for general PR. We conclude with a discussion on PR's future directions, accompanied by a summary of the literature covered and access to our open-source library, available to the robotics community at: https://github.com/MetaSLAM/GPRS.
Read more5/9/2024
0
RoboHop: Segment-based Topological Map Representation for Open-World Visual Navigation
Sourav Garg, Krishan Rana, Mehdi Hosseinzadeh, Lachlan Mares, Niko Sunderhauf, Feras Dayoub, Ian Reid
Mapping is crucial for spatial reasoning, planning and robot navigation. Existing approaches range from metric, which require precise geometry-based optimization, to purely topological, where image-as-node based graphs lack explicit object-level reasoning and interconnectivity. In this paper, we propose a novel topological representation of an environment based on image segments, which are semantically meaningful and open-vocabulary queryable, conferring several advantages over previous works based on pixel-level features. Unlike 3D scene graphs, we create a purely topological graph with segments as nodes, where edges are formed by a) associating segment-level descriptors between pairs of consecutive images and b) connecting neighboring segments within an image using their pixel centroids. This unveils a continuous sense of a place, defined by inter-image persistence of segments along with their intra-image neighbours. It further enables us to represent and update segment-level descriptors through neighborhood aggregation using graph convolution layers, which improves robot localization based on segment-level retrieval. Using real-world data, we show how our proposed map representation can be used to i) generate navigation plans in the form of hops over segments and ii) search for target objects using natural language queries describing spatial relations of objects. Furthermore, we quantitatively analyze data association at the segment level, which underpins inter-image connectivity during mapping and segment-level localization when revisiting the same place. Finally, we show preliminary trials on segment-level `hopping' based zero-shot real-world navigation. Project page with supplementary details: oravus.github.io/RoboHop/
Read more5/10/2024