Attack on Scene Flow using Point Clouds

0

Sign in to get full access
Overview
- This paper presents a new approach to attack scene flow estimation using point clouds.
- Scene flow refers to the 3D motion of objects in a scene, which is an important task in computer vision.
- The authors propose a novel attack method that can degrade the performance of scene flow estimation models.
- The paper evaluates the effectiveness of the attack on state-of-the-art scene flow estimation models and discusses the implications of this work.
Plain English Explanation
The paper discusses a new way to attack scene flow estimation models. Scene flow refers to the 3D motion of objects in a scene, which is an important task in computer vision. The authors present a novel attack method that can degrade the performance of these models.
Essentially, the attack works by making small, carefully crafted changes to the input 3D point cloud data. These changes are invisible to the human eye but cause the scene flow estimation model to output incorrect results. The authors evaluate the effectiveness of this attack on state-of-the-art scene flow estimation models and discuss the implications of this work.
The key idea is that even highly accurate computer vision models can be vulnerable to these types of adversarial attacks. This means that in real-world applications, such as autonomous vehicles or robotics, these models need to be carefully secured against potential attacks to ensure reliable and safe performance.
Technical Explanation
The paper introduces a new attack method targeting scene flow estimation models that use 3D point cloud data as input. The authors propose a gradient-based optimization approach to generate adversarial point clouds that can degrade the performance of these models.
Specifically, the attack algorithm iteratively updates the 3D coordinates of the input point cloud to maximize the loss of the scene flow estimation model, subject to a constraint on the maximum allowed perturbation. This ensures that the generated adversarial point clouds are visually indistinguishable from the original data, but cause significant errors in the model's output.
The authors evaluate their attack method on two state-of-the-art scene flow estimation models, VoxATNNet and FlowNet3D, and demonstrate that it can substantially degrade their performance. They also analyze the inherent adversarial robustness of these models and discuss potential countermeasures.
Critical Analysis
The paper presents a compelling and technically sound attack on scene flow estimation models. The authors have developed a clever optimization-based approach to generate adversarial point clouds that can reliably fool these models.
One potential limitation of the work is that it only considers static point cloud data, whereas in real-world applications, scene flow estimation often relies on dynamic point cloud sequences. Extending the attack to handle temporal information could be an interesting direction for future research.
Additionally, while the paper discusses potential countermeasures, such as adversarial training, the effectiveness of these defenses against the proposed attack is not fully evaluated. Further investigation into the inherent robustness of scene flow estimation models would be valuable.
Overall, this work highlights the vulnerability of state-of-the-art computer vision models to adversarial attacks and underscores the importance of developing robust and secure AI systems, especially for safety-critical applications.
Conclusion
This paper presents a novel attack method that can degrade the performance of scene flow estimation models using 3D point cloud data. The authors demonstrate the effectiveness of their attack on two state-of-the-art models and discuss the implications for the reliability and security of these systems.
The findings of this work are significant, as scene flow estimation is a crucial task in many computer vision applications, such as autonomous vehicles, robotics, and augmented reality. The ability to reliably and securely estimate 3D motion is essential for these applications to function safely and accurately. The proposed attack highlights the need for further research into the inherent adversarial robustness of scene flow estimation models and the development of effective countermeasures to ensure the trustworthiness of these systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Attack on Scene Flow using Point Clouds
Haniyeh Ehsani Oskouie, Mohammad-Shahram Moin, Shohreh Kasaei
Deep neural networks have made significant advancements in accurately estimating scene flow using point clouds, which is vital for many applications like video analysis, action recognition, and navigation. The robustness of these techniques, however, remains a concern, particularly in the face of adversarial attacks that have been proven to deceive state-of-the-art deep neural networks in many domains. Surprisingly, the robustness of scene flow networks against such attacks has not been thoroughly investigated. To address this problem, the proposed approach aims to bridge this gap by introducing adversarial white-box attacks specifically tailored for scene flow networks. Experimental results show that the generated adversarial examples obtain up to 33.7 relative degradation in average end-point error on the KITTI and FlyingThings3D datasets. The study also reveals the significant impact that attacks targeting point clouds in only one dimension or color channel have on average end-point error. Analyzing the success and failure of these attacks on the scene flow networks and their 2D optical flow network variants shows a higher vulnerability for the optical flow networks. Code is available at https://github.com/aheldis/Attack-on-Scene-Flow-using-Point-Clouds.git.
Read more8/28/2024

0
Toward Availability Attacks in 3D Point Clouds
Yifan Zhu, Yibo Miao, Yinpeng Dong, Xiao-Shan Gao
Despite the great progress of 3D vision, data privacy and security issues in 3D deep learning are not explored systematically. In the domain of 2D images, many availability attacks have been proposed to prevent data from being illicitly learned by unauthorized deep models. However, unlike images represented on a fixed dimensional grid, point clouds are characterized as unordered and unstructured sets, posing a significant challenge in designing an effective availability attack for 3D deep learning. In this paper, we theoretically show that extending 2D availability attacks directly to 3D point clouds under distance regularization is susceptible to the degeneracy, rendering the generated poisons weaker or even ineffective. This is because in bi-level optimization, introducing regularization term can result in update directions out of control. To address this issue, we propose a novel Feature Collision Error-Minimization (FC-EM) method, which creates additional shortcuts in the feature space, inducing different update directions to prevent the degeneracy of bi-level optimization. Moreover, we provide a theoretical analysis that demonstrates the effectiveness of the FC-EM attack. Extensive experiments on typical point cloud datasets, 3D intracranial aneurysm medical dataset, and 3D face dataset verify the superiority and practicality of our approach. Code is available at https://github.com/hala64/fc-em.
Read more7/17/2024
0
EgoFlowNet: Non-Rigid Scene Flow from Point Clouds with Ego-Motion Support
Ramy Battrawy, Ren'e Schuster, Didier Stricker
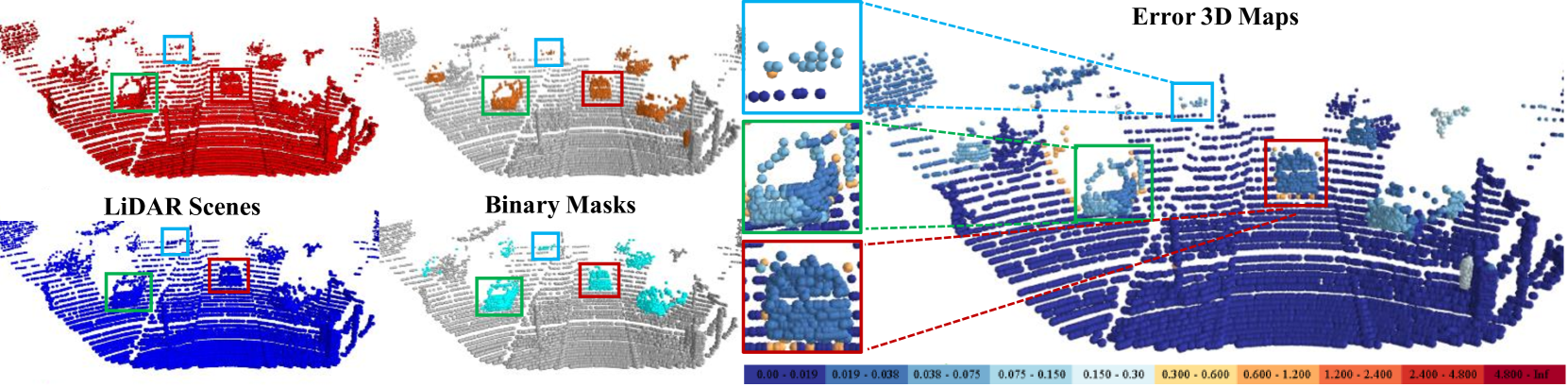
Recent weakly-supervised methods for scene flow estimation from LiDAR point clouds are limited to explicit reasoning on object-level. These methods perform multiple iterative optimizations for each rigid object, which makes them vulnerable to clustering robustness. In this paper, we propose our EgoFlowNet - a point-level scene flow estimation network trained in a weakly-supervised manner and without object-based abstraction. Our approach predicts a binary segmentation mask that implicitly drives two parallel branches for ego-motion and scene flow. Unlike previous methods, we provide both branches with all input points and carefully integrate the binary mask into the feature extraction and losses. We also use a shared cost volume with local refinement that is updated at multiple scales without explicit clustering or rigidity assumptions. On realistic KITTI scenes, we show that our EgoFlowNet performs better than state-of-the-art methods in the presence of ground surface points.
Read more7/4/2024

0
Transferable 3D Adversarial Shape Completion using Diffusion Models
Xuelong Dai, Bin Xiao
Recent studies that incorporate geometric features and transformers into 3D point cloud feature learning have significantly improved the performance of 3D deep-learning models. However, their robustness against adversarial attacks has not been thoroughly explored. Existing attack methods primarily focus on white-box scenarios and struggle to transfer to recently proposed 3D deep-learning models. Even worse, these attacks introduce perturbations to 3D coordinates, generating unrealistic adversarial examples and resulting in poor performance against 3D adversarial defenses. In this paper, we generate high-quality adversarial point clouds using diffusion models. By using partial points as prior knowledge, we generate realistic adversarial examples through shape completion with adversarial guidance. The proposed adversarial shape completion allows for a more reliable generation of adversarial point clouds. To enhance attack transferability, we delve into the characteristics of 3D point clouds and employ model uncertainty for better inference of model classification through random down-sampling of point clouds. We adopt ensemble adversarial guidance for improved transferability across different network architectures. To maintain the generation quality, we limit our adversarial guidance solely to the critical points of the point clouds by calculating saliency scores. Extensive experiments demonstrate that our proposed attacks outperform state-of-the-art adversarial attack methods against both black-box models and defenses. Our black-box attack establishes a new baseline for evaluating the robustness of various 3D point cloud classification models.
Read more7/16/2024