Bangladeshi Native Vehicle Detection in Wild

0

Sign in to get full access
Overview
- This paper presents a system for detecting Bangladeshi native vehicles in the wild, which is an important task for autonomous driving and robotics.
- The researchers leverage YOLO models to perform vehicle detection and classification on a custom dataset of Bangladeshi vehicles.
- The paper includes an analysis of the dataset, evaluation of the YOLO models, and discussion of the challenges and opportunities in this domain.
Plain English Explanation
The researchers in this paper wanted to create a system that could automatically detect and identify different types of vehicles commonly seen on the roads in Bangladesh. This is an important task for self-driving cars and robots that need to be able to navigate and interact with the local environment.
To do this, the researchers collected a dataset of images showing a variety of Bangladeshi vehicles, including cars, buses, trucks, and motorcycles. They then used a type of AI model called YOLO (You Only Look Once) to analyze these images and learn how to recognize the different vehicle types.
The researchers tested the YOLO models on the dataset and found that they were generally able to detect and classify the Bangladeshi vehicles quite accurately. However, they also identified some challenges, such as the diversity of vehicle designs and the presence of things like rickshaws and other unique local transportation options that the models sometimes had trouble with.
Overall, this research represents an important step towards developing autonomous systems that can operate effectively in the complex traffic environments found in developing countries like Bangladesh. By building custom datasets and adapting AI models to local conditions, the researchers are helping to make self-driving and robotic technologies more globally accessible and applicable.
Technical Explanation
The researchers in this paper developed a system for detecting and classifying Bangladeshi native vehicles using YOLO (You Only Look Once) models. They first created a custom dataset of images showing various types of Bangladeshi vehicles, including cars, buses, trucks, and motorcycles. This dataset was used to train and evaluate several YOLO model variations, including YOLOv5 and SGV3D.
The performance of the YOLO models was assessed using metrics like precision, recall, and F1-score. The researchers found that the models generally achieved good results in detecting and classifying the Bangladeshi vehicles, with the YOLOv5-based models performing the best overall. However, they also identified some challenges, such as the models sometimes struggling with unique local vehicle types like rickshaws.
To address potential biases in the vehicle detection, the researchers also explored techniques for mitigating bias towards vulnerable classes in the dataset. This involved techniques like oversampling and transfer learning to improve the model's performance on less represented vehicle types.
The researchers also examined the use of multimodal collaboration networks to leverage additional contextual information, such as geospatial data, to enhance the vehicle detection capabilities. This holds promise for improving the robustness and real-world applicability of the system.
Overall, this research demonstrates the potential and challenges of adapting state-of-the-art vehicle detection models to operate effectively in the unique traffic environment of Bangladesh. The insights and techniques developed in this work can inform future efforts to build autonomous systems that can navigate and interact with vehicles in diverse global settings.
Critical Analysis
The researchers in this paper have made a valuable contribution by developing a vehicle detection system tailored to the Bangladeshi context. However, there are a few potential limitations and areas for further research that could be explored:
-
Dataset Representation: While the researchers have made efforts to address biases in the dataset, there may still be room for improvement in ensuring the dataset fully captures the diversity of Bangladeshi vehicle types and conditions. Expanding the dataset and incorporating more representative samples could further enhance the model's performance.
-
Robustness to Real-World Conditions: The paper focuses on evaluating the models in controlled settings, but it would be important to also assess their performance in true real-world conditions, such as varying lighting, weather, and traffic scenarios. Anomaly detection in connected autonomous vehicles could be a relevant area to explore in this context.
-
Scalability and Deployment Considerations: The researchers mention the potential for this system to be deployed in autonomous driving and robotics applications, but the practicalities of scaling up the solution and integrating it into real-world systems are not extensively covered. Further research into the engineering challenges and system design requirements would be valuable.
-
Ethical and Social Implications: As autonomous systems become more prevalent, it is crucial to consider the broader societal impacts, such as issues of fairness, transparency, and accountability. The researchers could delve deeper into these ethical considerations and explore ways to ensure the responsible development and deployment of their vehicle detection technology.
Overall, this paper represents an important step forward in adapting computer vision techniques to the unique transportation landscape of Bangladesh. Continued research and collaboration with local stakeholders will be crucial to further refine and expand the capabilities of this system to benefit the broader community.
Conclusion
This research paper presents a vehicle detection system tailored to the Bangladeshi context, leveraging YOLO models to recognize and classify different types of local vehicles. The key contributions of this work include the development of a custom dataset of Bangladeshi vehicles, the evaluation of YOLO model performance on this dataset, and the exploration of techniques to address potential biases and enhance the robustness of the detection system.
The findings of this study demonstrate the potential for adapting state-of-the-art computer vision approaches to address the unique challenges of transportation in developing countries. By building custom datasets and optimizing AI models for local conditions, the researchers are paving the way for more globally accessible and applicable autonomous driving and robotics technologies.
However, the paper also highlights the need for continued research and consideration of practical deployment challenges, ethical implications, and broader societal impacts as these systems are further developed and integrated into real-world applications. Ongoing collaborations with local stakeholders and a holistic approach to system design and deployment will be crucial to ensuring the responsible and equitable advancement of these technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Bangladeshi Native Vehicle Detection in Wild
Bipin Saha, Md. Johirul Islam, Shaikh Khaled Mostaque, Aditya Bhowmik, Tapodhir Karmakar Taton, Md. Nakib Hayat Chowdhury, Mamun Bin Ibne Reaz
The success of autonomous navigation relies on robust and precise vehicle recognition, hindered by the scarcity of region-specific vehicle detection datasets, impeding the development of context-aware systems. To advance terrestrial object detection research, this paper proposes a native vehicle detection dataset for the most commonly appeared vehicle classes in Bangladesh. 17 distinct vehicle classes have been taken into account, with fully annotated 81542 instances of 17326 images. Each image width is set to at least 1280px. The dataset's average vehicle bounding box-to-image ratio is 4.7036. This Bangladesh Native Vehicle Dataset (BNVD) has accounted for several geographical, illumination, variety of vehicle sizes, and orientations to be more robust on surprised scenarios. In the context of examining the BNVD dataset, this work provides a thorough assessment with four successive You Only Look Once (YOLO) models, namely YOLO v5, v6, v7, and v8. These dataset's effectiveness is methodically evaluated and contrasted with other vehicle datasets already in use. The BNVD dataset exhibits mean average precision(mAP) at 50% intersection over union (IoU) is 0.848 corresponding precision and recall values of 0.841 and 0.774. The research findings indicate a mAP of 0.643 at an IoU range of 0.5 to 0.95. The experiments show that the BNVD dataset serves as a reliable representation of vehicle distribution and presents considerable complexities.
Read more5/21/2024

0
Vehicle Speed Detection System Utilizing YOLOv8: Enhancing Road Safety and Traffic Management for Metropolitan Areas
SM Shaqib, Alaya Parvin Alo, Shahriar Sultan Ramit, Afraz Ul Haque Rupak, Sadman Sadik Khan, Mr. Md. Sadekur Rahman
In order to ensure traffic safety through a reduction in fatalities and accidents, vehicle speed detection is essential. Relentless driving practices are discouraged by the enforcement of speed restrictions, which are made possible by accurate monitoring of vehicle speeds. Road accidents remain one of the leading causes of death in Bangladesh. The Bangladesh Passenger Welfare Association stated in 2023 that 7,902 individuals lost their lives in traffic accidents during the course of the year. Efficient vehicle speed detection is essential to maintaining traffic safety. Reliable speed detection can also help gather important traffic data, which makes it easier to optimize traffic flow and provide safer road infrastructure. The YOLOv8 model can recognize and track cars in videos with greater speed and accuracy when trained under close supervision. By providing insights into the application of supervised learning in object identification for vehicle speed estimation and concentrating on the particular traffic conditions and safety concerns in Bangladesh, this work represents a noteworthy contribution to the area. The MAE was 3.5 and RMSE was 4.22 between the predicted speed of our model and the actual speed or the ground truth measured by the speedometer Promising increased efficiency and wider applicability in a variety of traffic conditions, the suggested solution offers a financially viable substitute for conventional approaches.
Read more6/13/2024
0
A Dataset for Crucial Object Recognition in Blind and Low-Vision Individuals' Navigation
Md Touhidul Islam, Imran Kabir, Elena Ariel Pearce, Md Alimoor Reza, Syed Masum Billah
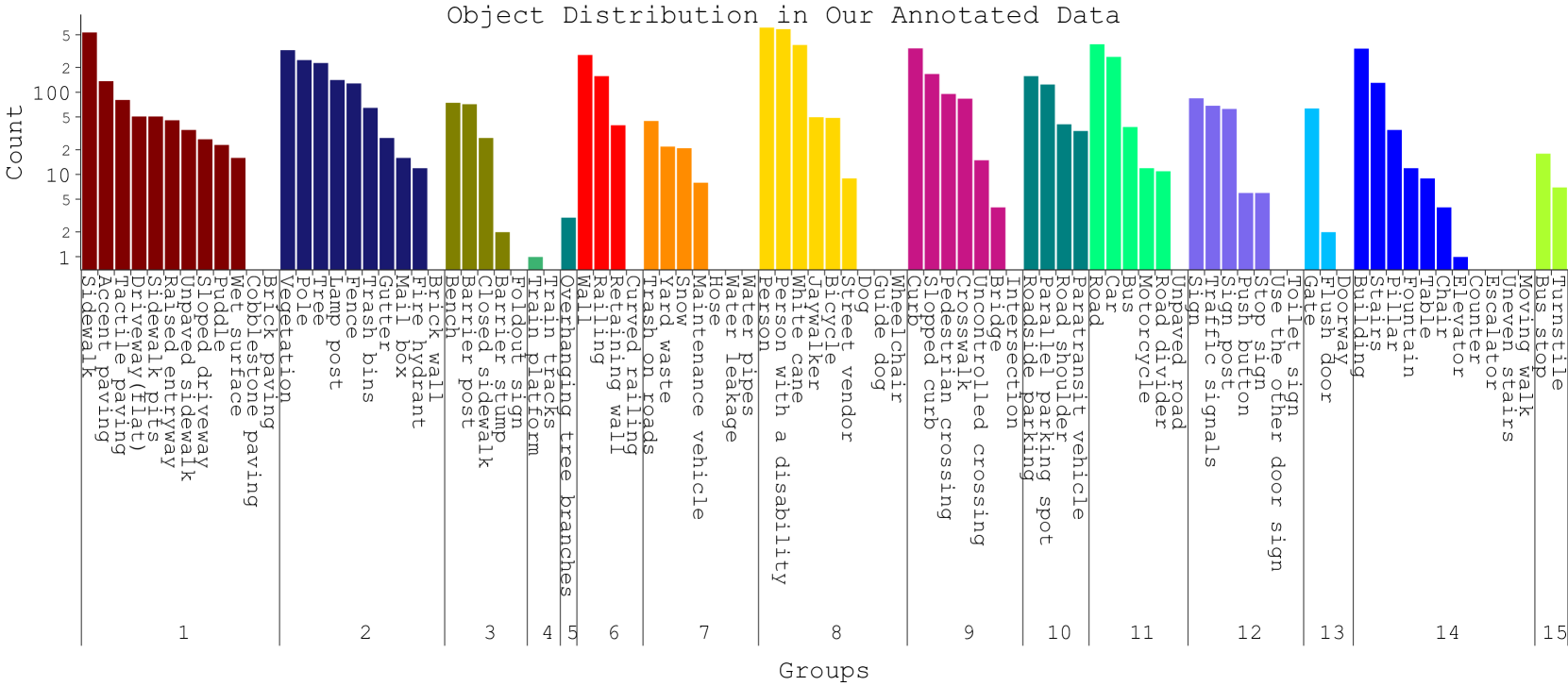
This paper introduces a dataset for improving real-time object recognition systems to aid blind and low-vision (BLV) individuals in navigation tasks. The dataset comprises 21 videos of BLV individuals navigating outdoor spaces, and a taxonomy of 90 objects crucial for BLV navigation, refined through a focus group study. We also provide object labeling for the 90 objects across 31 video segments created from the 21 videos. A deeper analysis reveals that most contemporary datasets used in training computer vision models contain only a small subset of the taxonomy in our dataset. Preliminary evaluation of state-of-the-art computer vision models on our dataset highlights shortcomings in accurately detecting key objects relevant to BLV navigation, emphasizing the need for specialized datasets. We make our dataset publicly available, offering valuable resources for developing more inclusive navigation systems for BLV individuals.
Read more7/25/2024

0
Real-Time Detection and Analysis of Vehicles and Pedestrians using Deep Learning
Md Nahid Sadik, Tahmim Hossain, Faisal Sayeed
Computer vision, particularly vehicle and pedestrian identification is critical to the evolution of autonomous driving, artificial intelligence, and video surveillance. Current traffic monitoring systems confront major difficulty in recognizing small objects and pedestrians effectively in real-time, posing a serious risk to public safety and contributing to traffic inefficiency. Recognizing these difficulties, our project focuses on the creation and validation of an advanced deep-learning framework capable of processing complex visual input for precise, real-time recognition of cars and people in a variety of environmental situations. On a dataset representing complicated urban settings, we trained and evaluated different versions of the YOLOv8 and RT-DETR models. The YOLOv8 Large version proved to be the most effective, especially in pedestrian recognition, with great precision and robustness. The results, which include Mean Average Precision and recall rates, demonstrate the model's ability to dramatically improve traffic monitoring and safety. This study makes an important addition to real-time, reliable detection in computer vision, establishing new benchmarks for traffic management systems.
Read more4/15/2024