Bayesian Inverse Reinforcement Learning for Non-Markovian Rewards
2406.13991
0
0
Abstract
Inverse reinforcement learning (IRL) is the problem of inferring a reward function from expert behavior. There are several approaches to IRL, but most are designed to learn a Markovian reward. However, a reward function might be non-Markovian, depending on more than just the current state, such as a reward machine (RM). Although there has been recent work on inferring RMs, it assumes access to the reward signal, absent in IRL. We propose a Bayesian IRL (BIRL) framework for inferring RMs directly from expert behavior, requiring significant changes to the standard framework. We define a new reward space, adapt the expert demonstration to include history, show how to compute the reward posterior, and propose a novel modification to simulated annealing to maximize this posterior. We demonstrate that our method performs well when optimizing according to its inferred reward and compares favorably to an existing method that learns exclusively binary non-Markovian rewards.
Create account to get full access
Overview
- This paper introduces a Bayesian approach to Inverse Reinforcement Learning (IRL) for non-Markovian rewards.
- Traditional IRL methods assume the reward function is Markovian, but this paper relaxes this assumption to handle more complex, non-Markovian rewards.
- The proposed Bayesian IRL framework can learn richer reward structures that capture long-term dependencies in the environment.
Plain English Explanation
In this paper, the researchers present a new way to learn reward functions from expert demonstrations, called Bayesian Inverse Reinforcement Learning (Bayesian IRL).
Traditional IRL methods assume the reward function only depends on the current state, which is known as the Markov property. However, in many real-world scenarios, rewards can depend on the entire history of states and actions, not just the current state. The Bayesian IRL approach developed in this paper can handle these more complex, non-Markovian reward structures.
By using a Bayesian framework, the method can learn a distribution over possible reward functions that best explain the expert demonstrations, rather than just a single reward function. This allows the algorithm to capture more nuanced and long-term dependencies in the reward structure.
Overall, this new Bayesian IRL approach can learn richer reward functions that better match the true preferences of the expert, which is important for applications like autonomous driving, robotics, and game AI where we want the agent to behave in a way that aligns with human values and intentions.
Technical Explanation
The key innovation in this paper is the development of a Bayesian IRL framework that can handle non-Markovian reward functions. Traditional IRL methods assume the reward function is a function of only the current state, but this paper relaxes this assumption.
The authors formulate the IRL problem as a Bayesian inference task, where the goal is to learn a posterior distribution over possible reward functions given the expert demonstrations. They model the reward function as a linear combination of non-Markovian features, which can capture long-term dependencies in the environment.
To make inference tractable, the authors propose an efficient algorithm that combines Monte Carlo sampling with a novel variational inference approach. This allows them to approximate the true posterior distribution over reward functions.
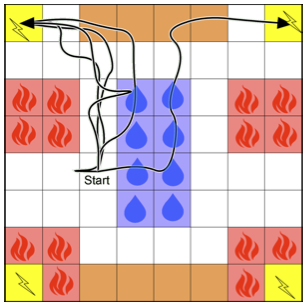
The authors evaluate their Bayesian IRL method on several benchmark domains, including a grid world navigation task and a continuous control problem. The results show that their approach can learn reward functions that better explain the expert behavior, compared to standard IRL baselines that assume Markovian rewards.
Critical Analysis
The primary strength of this paper is the relaxation of the Markov assumption in IRL, which allows the method to learn more expressive and realistic reward functions. This is an important advancement, as many real-world decision-making problems involve non-Markovian dynamics and rewards.
However, one potential limitation is the computational complexity of the proposed Bayesian IRL algorithm, as it relies on Monte Carlo sampling and variational inference. This could make it challenging to scale to very large or high-dimensional problems. The authors do not provide a detailed analysis of the computational runtime or memory requirements of their method.
Additionally, the paper does not explore the robustness of the Bayesian IRL approach to noisy or suboptimal expert demonstrations, which is an important consideration for practical applications. Further research could investigate the sensitivity of the method to different types of demonstration data.
Another area for potential improvement is the representation of the non-Markovian reward function. The authors use a linear combination of feature functions, but more expressive function approximators, such as neural networks, could be explored to capture even richer reward structures.
Overall, this paper presents an interesting and promising approach to addressing the limitations of traditional IRL methods by considering non-Markovian rewards. The Bayesian framework and the ability to learn more expressive reward functions are valuable contributions to the field of inverse reinforcement learning.
Conclusion
This paper introduces a new Bayesian Inverse Reinforcement Learning (Bayesian IRL) framework that can handle non-Markovian reward structures. By relaxing the Markov assumption, the proposed method can learn richer reward functions that better capture long-term dependencies in the environment.
The key innovation is the Bayesian formulation of the IRL problem, which allows the algorithm to learn a distribution over possible reward functions rather than a single function. This enables the method to handle more complex reward structures that traditional IRL approaches struggle with.
The results on benchmark domains demonstrate the advantages of the Bayesian IRL approach over standard IRL baselines that assume Markovian rewards. This is an important advancement, as many real-world decision-making problems involve non-Markovian dynamics and rewards.
Overall, this research contributes to the growing field of inverse reinforcement learning by expanding the types of reward functions that can be learned from expert demonstrations. The Bayesian perspective and the ability to handle non-Markovian rewards open up new possibilities for applications where we want agents to behave in alignment with human preferences and values.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
A Bayesian Approach to Robust Inverse Reinforcement Learning
Ran Wei, Siliang Zeng, Chenliang Li, Alfredo Garcia, Anthony McDonald, Mingyi Hong
0
0
We consider a Bayesian approach to offline model-based inverse reinforcement learning (IRL). The proposed framework differs from existing offline model-based IRL approaches by performing simultaneous estimation of the expert's reward function and subjective model of environment dynamics. We make use of a class of prior distributions which parameterizes how accurate the expert's model of the environment is to develop efficient algorithms to estimate the expert's reward and subjective dynamics in high-dimensional settings. Our analysis reveals a novel insight that the estimated policy exhibits robust performance when the expert is believed (a priori) to have a highly accurate model of the environment. We verify this observation in the MuJoCo environments and show that our algorithms outperform state-of-the-art offline IRL algorithms.
4/9/2024
🏅
Convergence of a model-free entropy-regularized inverse reinforcement learning algorithm
Titouan Renard, Andreas Schlaginhaufen, Tingting Ni, Maryam Kamgarpour
0
0
Given a dataset of expert demonstrations, inverse reinforcement learning (IRL) aims to recover a reward for which the expert is optimal. This work proposes a model-free algorithm to solve entropy-regularized IRL problem. In particular, we employ a stochastic gradient descent update for the reward and a stochastic soft policy iteration update for the policy. Assuming access to a generative model, we prove that our algorithm is guaranteed to recover a reward for which the expert is $varepsilon$-optimal using $mathcal{O}(1/varepsilon^{2})$ samples of the Markov decision process (MDP). Furthermore, with $mathcal{O}(1/varepsilon^{4})$ samples we prove that the optimal policy corresponding to the recovered reward is $varepsilon$-close to the expert policy in total variation distance.
4/24/2024
👁️
Offline Inverse RL: New Solution Concepts and Provably Efficient Algorithms
Filippo Lazzati, Mirco Mutti, Alberto Maria Metelli
0
0
Inverse reinforcement learning (IRL) aims to recover the reward function of an expert agent from demonstrations of behavior. It is well-known that the IRL problem is fundamentally ill-posed, i.e., many reward functions can explain the demonstrations. For this reason, IRL has been recently reframed in terms of estimating the feasible reward set (Metelli et al., 2021), thus, postponing the selection of a single reward. However, so far, the available formulations and algorithmic solutions have been proposed and analyzed mainly for the online setting, where the learner can interact with the environment and query the expert at will. This is clearly unrealistic in most practical applications, where the availability of an offline dataset is a much more common scenario. In this paper, we introduce a novel notion of feasible reward set capturing the opportunities and limitations of the offline setting and we analyze the complexity of its estimation. This requires the introduction an original learning framework that copes with the intrinsic difficulty of the setting, for which the data coverage is not under control. Then, we propose two computationally and statistically efficient algorithms, IRLO and PIRLO, for addressing the problem. In particular, the latter adopts a specific form of pessimism to enforce the novel desirable property of inclusion monotonicity of the delivered feasible set. With this work, we aim to provide a panorama of the challenges of the offline IRL problem and how they can be fruitfully addressed.
6/7/2024
🐍
A Unified Linear Programming Framework for Offline Reward Learning from Human Demonstrations and Feedback
Kihyun Kim, Jiawei Zhang, Asuman Ozdaglar, Pablo A. Parrilo
0
0
Inverse Reinforcement Learning (IRL) and Reinforcement Learning from Human Feedback (RLHF) are pivotal methodologies in reward learning, which involve inferring and shaping the underlying reward function of sequential decision-making problems based on observed human demonstrations and feedback. Most prior work in reward learning has relied on prior knowledge or assumptions about decision or preference models, potentially leading to robustness issues. In response, this paper introduces a novel linear programming (LP) framework tailored for offline reward learning. Utilizing pre-collected trajectories without online exploration, this framework estimates a feasible reward set from the primal-dual optimality conditions of a suitably designed LP, and offers an optimality guarantee with provable sample efficiency. Our LP framework also enables aligning the reward functions with human feedback, such as pairwise trajectory comparison data, while maintaining computational tractability and sample efficiency. We demonstrate that our framework potentially achieves better performance compared to the conventional maximum likelihood estimation (MLE) approach through analytical examples and numerical experiments.
6/5/2024