A Bayesian Solution To The Imitation Gap

0
Sign in to get full access
Overview
- This paper proposes a Bayesian solution to the "imitation gap" problem in reinforcement learning (RL)
- The imitation gap refers to the difficulty of learning complex behaviors from limited demonstration data
- The authors present a Bayesian framework that can learn expert policies from small datasets, addressing the imitation gap
Plain English Explanation
In the world of reinforcement learning (RL), there is a common challenge known as the "imitation gap." This refers to the difficulty of learning complex behaviors from a limited set of demonstration data provided by an expert. Imagine you want to teach a robot how to play chess, but you only have a few example games to show it. The robot may struggle to generalize from these limited examples and play the game at the same level as the expert.
The authors of this paper have developed a new Bayesian approach to help bridge this imitation gap. Their framework allows the robot (or RL agent) to learn expert policies more effectively from small datasets. By modeling the problem in a Bayesian way, the agent can draw upon prior knowledge and make informed inferences to overcome the limitations of the demonstration data.
This is an important advancement because it can enable RL agents to learn complex skills from fewer examples, which has practical applications in areas like robotics, video game AI, and autonomous systems. By bridging the imitation gap, these agents can more effectively learn from human experts, potentially leading to more capable and reliable systems.
Technical Explanation
The core of the paper's approach is a Bayesian formulation of the imitation learning problem. The authors model the expert's policy as a distribution over actions, conditioned on the current state. This policy distribution is parameterized by a set of latent variables, which the RL agent tries to infer from the demonstration data.
To do this, the agent maintains a posterior distribution over the latent policy parameters, updating this distribution as it observes more demonstrations. By reasoning about this posterior, the agent can make informed decisions about which actions to take in order to best imitate the expert's behavior, even with limited data.
The authors show that this Bayesian approach outperforms traditional imitation learning methods, such as adversarial imitation learning and evolution strategies, on a range of benchmark tasks. The Bayesian agent is able to learn more robust and generalizable policies from fewer demonstrations.
Critical Analysis
The paper presents a promising Bayesian solution to the imitation gap problem, but it does have some limitations worth considering. The authors acknowledge that their approach relies on the assumption that the expert's policy can be well-represented by the chosen parametric form. If this assumption is violated, the Bayesian agent may struggle to learn the true expert behavior.
Additionally, the computational complexity of the Bayesian inference process could be a concern, especially for large or continuous state-action spaces. The authors do not provide a detailed analysis of the runtime or memory requirements of their method, which would be important for understanding its practical feasibility.
Finally, the paper focuses on standard benchmark tasks and does not explore the performance of the Bayesian approach in more realistic, complex environments. Further research would be needed to understand how well this method scales and generalizes to real-world applications.
Conclusion
This paper introduces a novel Bayesian framework for addressing the imitation gap in reinforcement learning. By modeling the expert's policy as a distribution and reasoning about this distribution in a Bayesian way, the RL agent can learn complex behaviors from limited demonstration data.
The authors demonstrate the effectiveness of their approach on standard benchmark tasks, showing that it outperforms previous imitation learning methods. This work represents an important step forward in enabling RL agents to learn from human experts more efficiently, which could have significant implications for the development of more capable and reliable autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Bayesian Solution To The Imitation Gap
Risto Vuorio, Mattie Fellows, Cong Lu, Cl'emence Grislain, Shimon Whiteson
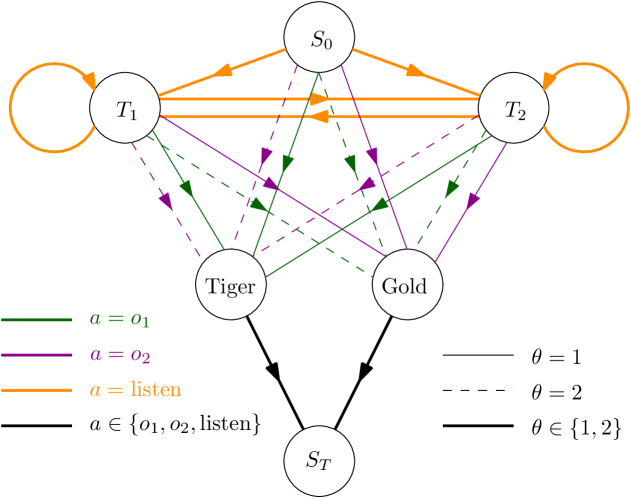
In many real-world settings, an agent must learn to act in environments where no reward signal can be specified, but a set of expert demonstrations is available. Imitation learning (IL) is a popular framework for learning policies from such demonstrations. However, in some cases, differences in observability between the expert and the agent can give rise to an imitation gap such that the expert's policy is not optimal for the agent and a naive application of IL can fail catastrophically. In particular, if the expert observes the Markov state and the agent does not, then the expert will not demonstrate the information-gathering behavior needed by the agent but not the expert. In this paper, we propose a Bayesian solution to the Imitation Gap (BIG), first using the expert demonstrations, together with a prior specifying the cost of exploratory behavior that is not demonstrated, to infer a posterior over rewards with Bayesian inverse reinforcement learning (IRL). BIG then uses the reward posterior to learn a Bayes-optimal policy. Our experiments show that BIG, unlike IL, allows the agent to explore at test time when presented with an imitation gap, whilst still learning to behave optimally using expert demonstrations when no such gap exists.
Read more7/2/2024

0
Hybrid Inverse Reinforcement Learning
Juntao Ren, Gokul Swamy, Zhiwei Steven Wu, J. Andrew Bagnell, Sanjiban Choudhury
The inverse reinforcement learning approach to imitation learning is a double-edged sword. On the one hand, it can enable learning from a smaller number of expert demonstrations with more robustness to error compounding than behavioral cloning approaches. On the other hand, it requires that the learner repeatedly solve a computationally expensive reinforcement learning (RL) problem. Often, much of this computation is wasted searching over policies very dissimilar to the expert's. In this work, we propose using hybrid RL -- training on a mixture of online and expert data -- to curtail unnecessary exploration. Intuitively, the expert data focuses the learner on good states during training, which reduces the amount of exploration required to compute a strong policy. Notably, such an approach doesn't need the ability to reset the learner to arbitrary states in the environment, a requirement of prior work in efficient inverse RL. More formally, we derive a reduction from inverse RL to expert-competitive RL (rather than globally optimal RL) that allows us to dramatically reduce interaction during the inner policy search loop while maintaining the benefits of the IRL approach. This allows us to derive both model-free and model-based hybrid inverse RL algorithms with strong policy performance guarantees. Empirically, we find that our approaches are significantly more sample efficient than standard inverse RL and several other baselines on a suite of continuous control tasks.
Read more6/6/2024
🏅
0
Imitation Bootstrapped Reinforcement Learning
Hengyuan Hu, Suvir Mirchandani, Dorsa Sadigh
Despite the considerable potential of reinforcement learning (RL), robotic control tasks predominantly rely on imitation learning (IL) due to its better sample efficiency. However, it is costly to collect comprehensive expert demonstrations that enable IL to generalize to all possible scenarios, and any distribution shift would require recollecting data for finetuning. Therefore, RL is appealing if it can build upon IL as an efficient autonomous self-improvement procedure. We propose imitation bootstrapped reinforcement learning (IBRL), a novel framework for sample-efficient RL with demonstrations that first trains an IL policy on the provided demonstrations and then uses it to propose alternative actions for both online exploration and bootstrapping target values. Compared to prior works that oversample the demonstrations or regularize RL with an additional imitation loss, IBRL is able to utilize high quality actions from IL policies since the beginning of training, which greatly accelerates exploration and training efficiency. We evaluate IBRL on 6 simulation and 3 real-world tasks spanning various difficulty levels. IBRL significantly outperforms prior methods and the improvement is particularly more prominent in harder tasks.
Read more5/7/2024

0
Expert Proximity as Surrogate Rewards for Single Demonstration Imitation Learning
Chia-Cheng Chiang, Li-Cheng Lan, Wei-Fang Sun, Chien Feng, Cho-Jui Hsieh, Chun-Yi Lee
In this paper, we focus on single-demonstration imitation learning (IL), a practical approach for real-world applications where acquiring multiple expert demonstrations is costly or infeasible and the ground truth reward function is not available. In contrast to typical IL settings with multiple demonstrations, single-demonstration IL involves an agent having access to only one expert trajectory. We highlight the issue of sparse reward signals in this setting and propose to mitigate this issue through our proposed Transition Discriminator-based IL (TDIL) method. TDIL is an IRL method designed to address reward sparsity by introducing a denser surrogate reward function that considers environmental dynamics. This surrogate reward function encourages the agent to navigate towards states that are proximal to expert states. In practice, TDIL trains a transition discriminator to differentiate between valid and non-valid transitions in a given environment to compute the surrogate rewards. The experiments demonstrate that TDIL outperforms existing IL approaches and achieves expert-level performance in the single-demonstration IL setting across five widely adopted MuJoCo benchmarks as well as the Adroit Door robotic environment.
Read more7/9/2024